水电站无边界作业面施工人员出勤无感知打卡方法及装置与流程
本发明涉及出勤打卡,尤其涉及一种水电站无边界作业面施工人员出勤无感知打卡方法、装置、电子设备及计算机可读存储介质。
背景技术:
1、出勤打卡是一种记录员工工作时长及出勤情况的管理方式,出勤打卡涉及传感器技术、云计算、大数据及人工智能等多种技术。水电站的建设施工区域大多处于偏远地区,地形地貌复杂,因此对于水电站施工工人在施工过程中的管理监护显得尤为重要。
2、当前进行施工人员的到离岗打卡方式大多是传统打卡方式,一般需要施工人员主动将工作卡片或指纹等放置于打卡机上打卡,这种打卡方式不能对打卡人员进行全周期的施工监护,也需要耗费较多的人力,因此当前水电站施工人员的出勤打卡方式存在打卡方式繁琐、监管效果不佳的问题。
技术实现思路
1、本发明提供一种水电站无边界作业面施工人员出勤无感知打卡方法、装置及计算机可读存储介质,其主要目的在于解决当前水电站施工人员的出勤打卡方式存在打卡方式繁琐、监管效果不佳的问题。
2、为实现上述目的,本发明提供的一种水电站无边界作业面施工人员出勤无感知打卡方法,包括:
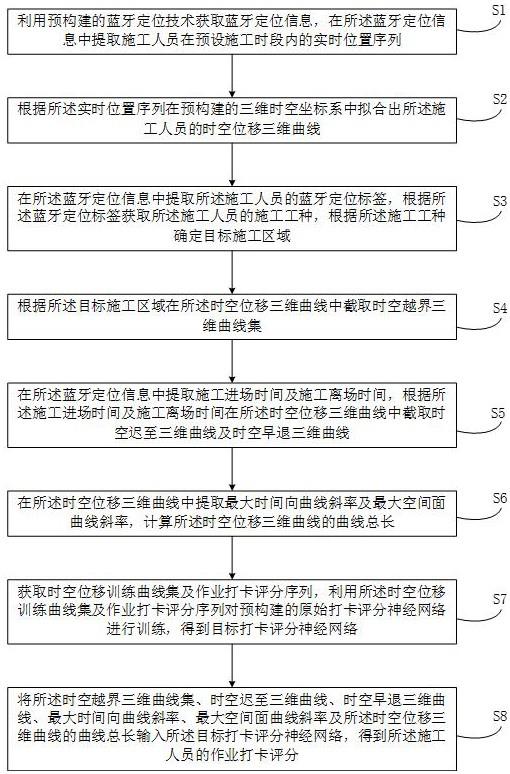
3、利用预构建的蓝牙定位技术获取蓝牙定位信息,在所述蓝牙定位信息中提取施工人员在预设施工时段内的实时位置序列;
4、根据所述实时位置序列在预构建的三维时空坐标系中拟合出所述施工人员的时空位移三维曲线;
5、在所述蓝牙定位信息中提取所述施工人员的蓝牙定位标签,根据所述蓝牙定位标签获取所述施工人员的施工工种,根据所述施工工种确定目标施工区域;
6、根据所述目标施工区域在所述时空位移三维曲线中截取时空越界三维曲线集;
7、在所述蓝牙定位信息中提取施工进场时间及施工离场时间,根据所述施工进场时间及施工离场时间在所述时空位移三维曲线中截取时空迟至三维曲线及时空早退三维曲线;
8、在所述时空位移三维曲线中提取最大时间向曲线斜率及最大空间面曲线斜率,计算所述时空位移三维曲线的曲线总长;
9、获取时空位移训练曲线集及作业打卡评分序列,利用所述时空位移训练曲线集及作业打卡评分序列对预构建的原始打卡评分神经网络进行训练,得到目标打卡评分神经网络;
10、将所述时空越界三维曲线集、时空迟至三维曲线、时空早退三维曲线、最大时间向曲线斜率、最大空间面曲线斜率及所述时空位移三维曲线的曲线总长输入所述目标打卡评分神经网络,得到所述施工人员的作业打卡评分。
11、可选地,所述利用预构建的蓝牙定位技术获取蓝牙定位信息,包括:
12、利用预构建的蓝牙单基站获取可穿戴蓝牙设备的水平面测向角度及信号强度;
13、根据所述信号强度,利用预构建的信号强度距离公式计算水平测距,其中所述信号强度距离公式如下所示:
14、;
15、其中,表示信号强度,表示第一估计参数,表示第二估计参数,表示水平测距;
16、获取所述蓝牙单基站的蓝牙参照坐标,根据所述蓝牙参照坐标、水平面测向角度及所述水平测距,利用预构建的移动蓝牙坐标公式计算所述可穿戴蓝牙设备的移动蓝牙坐标,其中所述移动蓝牙坐标公式如下所示:
17、;
18、其中,()表示移动蓝牙坐标,()表示蓝牙参照坐标,表示水平面测向角度;
19、获取所述可穿戴蓝牙设备的定位标签及所述移动蓝牙坐标的测定时间,根据所述定位标签、测定时间及所述移动蓝牙坐标构建所述蓝牙定位信息,其中所述定位标签可以为蓝牙地址。
20、可选地,所述根据所述实时位置序列在预构建的三维时空坐标系中拟合出所述施工人员的时空位移三维曲线,包括:
21、在所述实时位置序列中依次提取每一个实时位置对应的测定时间及测定位置;
22、根据所述测定位置在所述三维时空坐标系中确定二维空间坐标点;
23、根据所述测定时间及所述二维空间坐标点在所述三维时空坐标系中确定三维时空坐标点;
24、汇总所述实时位置序列中所有实时位置的三维时空坐标点,得到三维时空坐标点集;
25、拟合所述三维时空坐标点集,得到所述时空位移三维曲线。
26、可选地,所述根据所述施工工种确定目标施工区域,包括:
27、接收用户根据所述施工工种及当前日期划定的施工作业任务;
28、根据所述施工作业任务划定所述目标施工区域。
29、可选地,所述根据所述目标施工区域在所述时空位移三维曲线中截取时空越界三维曲线集,包括:
30、提取所述三维时空坐标系中的二维空间坐标平面;
31、获取所述时空位移三维曲线在所述二维空间坐标平面的投影曲线;
32、利用所述目标施工区域对所述二维空间坐标平面进行切分,得到区域外平面;
33、判断所述区域外平面是否存在区域外曲线;
34、若所述区域外平面存在区域外曲线,则将所述区域外曲线作为时空越界三维曲线;
35、汇总所有时空越界三维曲线,得到时空越界三维曲线集;
36、若所述区域外平面不存在区域外曲线,则将所述时空越界三维曲线集置为0。
37、可选地,所述根据所述施工进场时间及施工离场时间在所述时空位移三维曲线中截取时空迟至三维曲线及时空早退三维曲线,包括:
38、根据所述施工进场时间及施工离场时间在所述时空位移三维曲线中识别施工进场三维坐标及施工离场三维坐标;
39、判断所述施工进场时间是否处于预设的标准进场时间之后;
40、若所述施工进场时间处于所述标准进场时间之后,则根据所述标准进场时间在所述时空位移三维曲线中识别标准进场三维坐标;
41、根据所述标准进场三维坐标及所述施工进场三维坐标在所述时空位移三维曲线中截取进场迟至三维曲线;
42、若所述施工进场时间不处于所述标准进场时间之后,则判断所述施工离场时间是否处于预设的标准离场时间之前;
43、若所述施工离场时间处于所述标准离场时间之前,则根据所述标准离场时间在所述时空位移三维曲线中识别标准离场三维坐标;
44、根据所述标准离场三维坐标及所述施工离场三维坐标在所述时空位移三维曲线中截取离场早退三维曲线;
45、若所述施工离场时间不处于所述标准离场时间之前,则将时空迟至三维曲线及时空早退三维曲线置为0。
46、可选地,所述在所述时空位移三维曲线中提取最大时间向曲线斜率及最大空间面曲线斜率,包括:
47、在所述时空位移三维曲线中依次提取三维曲线斜率,计算所述三维曲线斜率与所述三维时空坐标系中时间坐标轴的夹角,得到时间向曲线斜率集;
48、计算所述三维曲线斜率与所述二维空间坐标平面的夹角,得到空间面曲线斜率集;
49、分别在所述时间向曲线斜率集及空间面曲线斜率集提取最大时间向曲线斜率及最大空间面曲线斜率。
50、可选地,所述计算所述时空位移三维曲线的曲线总长,包括:
51、提取所述时空位移三维曲线的曲线起始点及曲线终止点,将预设的单位移速点从所述时空位移三维曲线的曲线起始点移动至曲线终止点,得到移动时长;
52、根据所述预设的单位测速及所述移动时长计算所述时空位移三维曲线的曲线总长。
53、可选地,所述利用所述时空位移训练曲线集及作业打卡评分序列对预构建的原始打卡评分神经网络进行训练,得到目标打卡评分神经网络,包括:
54、在所述时空位移训练曲线集及作业打卡评分序列中依次提取对应的时空位移训练曲线及目标作业打卡评分;
55、提取所述时空位移训练曲线的时空越界训练曲线集、时空迟至训练曲线、时空早退训练曲线、最大时间向训练斜率、最大空间面训练斜率及时空位移训练曲线的曲线总长;
56、将所述时空越界训练曲线集、时空迟至训练曲线、时空早退训练曲线、最大时间向训练斜率、最大空间面训练斜率及时空位移训练曲线的曲线总长输入至所述原始打卡评分神经网络中,得到原始作业打卡评分;
57、计算所述原始作业打卡评分与所述目标作业打卡评分的训练误差,判断所述训练误差是否小于等于预设的误差阈值;
58、若所述训练误差小于等于所述误差阈值,则得到所述目标打卡评分神经网络;
59、若所述训练误差不小于等于所述误差阈值,则根据所述训练误差迭代调整所述原始打卡评分神经网络,直至所述训练误差小于等于所述误差阈值,得到目标打卡评分神经网络。
60、为了解决上述问题,本发明还提供一种水电站无边界作业面施工人员出勤无感知打卡装置,所述装置包括:
61、时空位移三维曲线绘制模块,用于利用预构建的蓝牙定位技术获取蓝牙定位信息,在所述蓝牙定位信息中提取施工人员在预设施工时段内的实时位置序列;根据所述实时位置序列在预构建的三维时空坐标系中拟合出所述施工人员的时空位移三维曲线;
62、目标施工区域锁定模块,用于在所述蓝牙定位信息中提取所述施工人员的蓝牙定位标签,根据所述蓝牙定位标签获取所述施工人员的施工工种,根据所述施工工种确定目标施工区域;
63、时空曲线特征提取模块,用于根据所述目标施工区域在所述时空位移三维曲线中截取时空越界三维曲线集;在所述蓝牙定位信息中提取施工进场时间及施工离场时间,根据所述施工进场时间及施工离场时间在所述时空位移三维曲线中截取时空迟至三维曲线及时空早退三维曲线;在所述时空位移三维曲线中提取最大时间向曲线斜率及最大空间面曲线斜率,计算所述时空位移三维曲线的曲线总长;
64、神经网络训练模块,用于获取时空位移训练曲线集及作业打卡评分序列,利用所述时空位移训练曲线集及作业打卡评分序列对预构建的原始打卡评分神经网络进行训练,得到目标打卡评分神经网络;
65、作业打卡评分模块,用于将所述时空越界三维曲线集、时空迟至三维曲线、时空早退三维曲线、最大时间向曲线斜率、最大空间面曲线斜率及所述时空位移三维曲线的曲线总长输入所述目标打卡评分神经网络,得到所述施工人员的作业打卡评分。
66、为了解决上述问题,本发明还提供一种电子设备,所述电子设备包括:
67、至少一个处理器;以及,
68、与所述至少一个处理器通信连接的存储器;其中,
69、所述存储器存储有可被所述至少一个处理器执行的指令,所述指令被所述至少一个处理器执行,以实现上述所述的水电站无边界作业面施工人员出勤无感知打卡方法。
70、为了解决上述问题,本发明还提供一种计算机可读存储介质,所述计算机可读存储介质中存储有至少一个指令,所述至少一个指令被电子设备中的处理器执行以实现上述所述的水电站无边界作业面施工人员出勤无感知打卡方法。
71、相比于背景技术所述:当前水电站施工人员的出勤打卡方式存在打卡方式繁琐、监管效果不佳的现象,本发明实施例是利用将时空位移三维曲线中的时空越界三维曲线集、时空迟至三维曲线、时空早退三维曲线、最大时间向曲线斜率、最大空间面曲线斜率及时空位移三维曲线的曲线总长等时空曲线特征输入目标打卡评分神经网络,从而得到所述施工人员的作业打卡评分,此方法是在存在时空曲线特征及目标打卡评分神经网络的前提下进行的,因此需要获取时空曲线特征及目标打卡评分神经网络,在获取时空曲线特征的过程中,需要先绘制时空位移三维曲线,再利用目标施工区域在所述时空位移三维曲线中提取时空曲线特征,在绘制时空位移三维曲线过程中需要先在所述蓝牙定位信息中提取施工人员在预设施工时段内的实时位置序列,再根据所述实时位置序列在预构建的三维时空坐标系中拟合出所述施工人员的时空位移三维曲线,在确定目标施工区域的过程中,根据所述蓝牙定位标签获取所述施工人员的施工工种,根据所述施工工种确定目标施工区域,此时就可以分别根据所述目标施工区域在所述时空位移三维曲线中截取时空越界三维曲线集,再在所述蓝牙定位信息中提取施工进场时间及施工离场时间,从而可以根据所述施工进场时间及施工离场时间在所述时空位移三维曲线中截取时空迟至三维曲线及时空早退三维曲线,通过在所述时空位移三维曲线中提取最大时间向曲线斜率及最大空间面曲线斜率,最后计算所述时空位移三维曲线的曲线总长即可得到所述时空曲线特征,在获取目标打卡评分神经网络时,需要先获取时空位移训练曲线集及作业打卡评分序列,再利用所述时空位移训练曲线集及作业打卡评分序列对预构建的原始打卡评分神经网络进行训练,从而得到目标打卡评分神经网络,最后将所述时空越界三维曲线集、时空迟至三维曲线、时空早退三维曲线、最大时间向曲线斜率、最大空间面曲线斜率及所述时空位移三维曲线的曲线总长输入所述目标打卡评分神经网络,得到所述施工人员的作业打卡评分。因此本发明提出的水电站无边界作业面施工人员出勤无感知打卡方法、装置、电子设备及计算机可读存储介质,可以解决当前水电站施工人员的出勤打卡方式存在打卡方式繁琐、监管效果不佳的问题。
- 还没有人留言评论。精彩留言会获得点赞!