城市快速路主辅路车路协同专用道系统的制作方法
[0001]
本发明涉及智能交通技术,具体涉及一种城市快速路主辅路车路协同专用道系统。
背景技术:
[0002]
车路协同自动驾驶的发展对于提升交通运输效率、增强交通出行安全、缓解交通拥堵、减少空气污染、提高驾驶和乘坐的舒适性等具有十分重要的意义。虽然世界各国对自动驾驶的研究已经非常成熟,但是目前自动驾驶允许驾驶的场地仍然有局限性,有的国家已经允许自动驾驶车辆在公共道路上进行测试,但是在公共道路上行驶既增大了测试的负担,又会对其他车辆造成一定的影响,同时会引发一系列的安全问题。自动驾驶已经是必然趋势,在未来一定会大量的投入使用,应用到实践中,以解决各种交通问题。如果自动驾驶车辆和普通车辆同时在共用道路上行驶必然是不合理的,这会使得自动驾驶的发展进展缓慢,因此有必要设计出自动驾驶专用车道来解决这个问题。考虑到未来自动驾驶车辆会慢慢在城市普及,因此有必要针对典型的主辅路城市快速路结构设计出一套车路协同自动驾驶专用道系统。
技术实现要素:
[0003]
发明目的:本发明的目的在于解决现有技术中存在的不足,提供一种城市快速路主辅路车路协同专用道系统。
[0004]
技术方案:本发明的一种城市快速路主辅路车路协同专用道系统,包括主路车道、辅路车道、车辆、缓冲区、模式切换区、等待区、等待/切换区、车路协同信号灯交叉口、方向切换区、车辆编组、模式切换流程和交叉口通过流程;所述主路车道为不少于双向6车道的城市快速路主路车道,辅路车道为不少于2车道的辅路车道,主路车道和辅路车道上均设有自动驾驶专用道和普通车道;所述车辆包括自动车辆和普通车辆,且自动车辆设有自动驾驶模式和手动驾驶模式;所述缓冲区为车辆加减速区域,驾驶专用车道和普通车道均设置有缓冲区(并且缓冲区既可以位于主路区域,也可以位于辅路区域),缓冲区为cavh系统覆盖区域;所述模式切换区包括自动/手动切换和手动/自动切换;所述等待区为信号灯后车辆等待区域;所述等待/切换区为同时兼具等待区和模式切换区功能的区域;所述方向切换区为普通车道上位于信号灯前用于提示普通车辆进行方向切换的区域;所述车路协同信号灯交叉口为普通车道与自动驾驶专用道的平交信号灯路口;所述模式切换流程包括自动驾驶车辆手动模式转为自动模式和自动驾驶车辆自动模式转换为手动模式;所述车辆编组为自动车辆根据cavh控制中心指令在自动车道上自动分组;所述车路协同信号灯交叉口通过流程为普通车辆和自动车辆在信号灯控制下分时通过交叉口流程,包括一般交叉口通过流程、结合手动/自动模式切换的交叉口通过流程和结合自动/手动模式切换的交叉口通过流程。
[0005]
进一步的,还包括自动驾驶专用道与普通车道之间的切换模块、自动驾驶专用道
的汇入/汇出模块,以及自动驾驶专用道和普通车道的信号灯交叉模块。
[0006]
进一步的,所述cavh控制中心进行信号灯优化的方法为:路侧检测器rsu收集的由车载检测器obu提供的所有车辆位置、速度和加速度状态信息,cavh控制中心根据上述信息将车辆编组根据编组方式通过控制自动驾驶车辆,将同一编组内部的车辆间距拉近,而将不同车辆编组之间的间距扩大;cavh控制中心根据编组后的自动驾驶专用道中的车辆位置和速度来确定车路协同信号灯交叉口的信号灯状态;信号灯状态确定后,普通行驶状态下自动车辆和普通车辆服从信号灯控制,并在通过信号灯后进入各自目标车道;
[0007]
其中每一个信号灯的状态需要满足:1)当信号灯为绿灯时,自动驾驶专用道上没有车辆通过该信号灯所处路口;2)绿灯开始的时刻为任意车辆编组的最后一辆车完全通过路口的时刻;3)绿灯结束的时刻为下一车辆编组的第一辆车到达路口n秒之前,n不小于3。
[0008]
进一步的,所述自动驾驶专用道包括主路内侧自动驾驶专用道、主路外侧自动驾驶专用道、辅路内侧自动驾驶专用道和辅路外侧自动驾驶专用道四种形式。
[0009]
进一步的,所述一般交叉口通过流程依次包括以下步骤:
[0010]
1)对于普通车:普通车辆进入方向切换区,随后进入等待区进行减速,驾驶员通过观察判断信号灯是否为绿灯,若为绿灯,则车辆继续通过并按照路口明显导流标识迅速进入相应目标普通车道;若为红灯,则车辆继续等待;
[0011]
2)对于行驶在自动驾驶专用道上的自动车辆:按照各自编组分组通过交叉口,进入目标自动驾驶车道。
[0012]
进一步的,所述结合手动/自动模式切换的交叉口通过流程依次包括以下步骤:
[0013]
1)对于普通车辆:
[0014]
普通车辆经过等待/切换区进行减速,驾驶员通过观察判断信号灯是否为绿灯,若为绿灯,则车辆继续通过并按照路口明显导流标识迅速进入相应目标普通车道;若为红灯,则车辆继续等待;
[0015]
2)对于普通行驶状态下自动车辆:
[0016]
步骤一:普通行驶状态下自动车辆经过等待/切换区减速并向车路协同自动驾驶cavh系统发出模式切换需求,cavh系统接受请求并控制车辆,使该车辆行驶在自动模式下;
[0017]
步骤二:自动车辆通过cavh系统判断信号灯是否为绿灯,若为绿灯,则自动车辆通过交叉口后进入目标自动驾驶专用道,若为红灯,则自动车辆继续等待;
[0018]
步骤三:自动车辆通过交叉口后,cavh系统更新系统状态并将自动驾驶专用道上行驶的车辆进行自动编组,至此自动车辆完成普通车道至自动驾驶专用道的切换过程;
[0019]
步骤四:cavh控制中心进行信号灯优化。
[0020]
进一步的,所述结合自动/手动模式切换的交叉口通过流程依次包括以下步骤:
[0021]
1)对于普通车:
[0022]
普通车辆进入方向切换区,随后进入等待区进行减速,驾驶员通过观察判断信号灯是否为绿灯,若为绿灯,则车辆继续通过并按照路口明显导流标识迅速进入相应目标普通车道;若为红灯,则车辆继续等待。
[0023]
2)对于行驶在自动驾驶专用道上的自动车辆:
[0024]
步骤一:自动车辆经过模式切换区减速并向车路协同自动驾驶cavh系统发出模式切换需求,cavh系统接受请求并将车辆控制权交给驾驶员,使该车辆行驶在普通模式下,驾
驶员进入目标普通车道;
[0025]
步骤二:自动车辆通过交叉口后,cavh系统更新系统状态并将自动驾驶专用道上行驶的车辆进行自动编组,至此自动车辆完成由自动驾驶专用道至普通车道的切换过程;
[0026]
步骤三:cavh控制中心进行信号灯优化。
[0027]
有益效果:本发明通过合理的管理自动驾驶车辆并优化信号灯方案,在不改动道路现有结构的前提下,确保自动驾驶专用车道的运营安全,进一步提升自动驾驶专用车道的运营效率,同时提高城市快速路的整体运营效率。
附图说明
[0028]
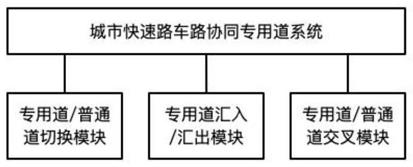
图1本发明的系统模块示意图;
[0029]
图2本发明的系统流程示意图;
[0030]
图3本发明的专用道切换至普通道流程示意图;
[0031]
图4本发明的普通道切换至专用道流程示意图;
[0032]
图5本发明的信号灯控制专用道/普通道交叉口流程示意图;
[0033]
图6为主路内侧是自动驾驶专用道时,自动驾驶车辆进入专用道类型一;
[0034]
图7为主路内侧是自动驾驶专用道时,自动驾驶车辆驶出专用道类型一;
[0035]
图8为主路内侧是自动驾驶专用道时,自动驾驶车辆进入和驶出专用车道类型二;
[0036]
图9为主路外侧是自动驾驶专用道时,入口处辅路车辆进入主路类型一;
[0037]
图10为主路外侧是自动驾驶专用道时,入口处辅路车辆进入主路类型二;
[0038]
图11为主路外侧是自动驾驶专用道时,出口处主路车辆驶出主路类型一;
[0039]
图12为主路外侧是自动驾驶专用道时,出口处主路车辆驶出主路类型二;
[0040]
图13为主路外侧是自动驾驶专用道时,自动驾驶车辆主路进入专用道类型一;
[0041]
图14为主路外侧是自动驾驶专用道时,自动驾驶车辆主路驶出专用道类型一;
[0042]
图15为主路外侧是自动驾驶专用道时,自动驾驶车辆进入和驶出专用车道类型二;
[0043]
图16本发明的辅路内侧专用道入口基本设计示意图;
[0044]
图17本发明的辅路内侧专用道出口基本设计示意图;
[0045]
图18本发明的主路辅路专用道衔接入口基本设计示意图;
[0046]
图19本发明的主路辅路专用道衔接入口基本设计示意图(另一种设计方案);
[0047]
图20本发明的主路辅路专用道衔接出口基本设计示意图;
[0048]
图21本发明的辅路内侧专用道入口同时进行手动到自动切换示意图;
[0049]
图22本发明的辅路内侧专用道出口同时进行手动到自动切换示意图;
[0050]
图23本发明的主路辅路专用道衔接入口同时进行手动到自动切换示意图;
[0051]
图24本发明的主路辅路专用道衔接入口同时进行手动到自动切换示意图(另一种设计方案);
[0052]
图25本发明的主路辅路专用道衔接出口同时进行手动到自动切换示意图;
[0053]
图26本发明的辅路内侧专用道入口同时进行自动到手动切换示意图;
[0054]
图27本发明的主路辅路专用道衔接入口同时进行自动到手动切换示意图;
[0055]
图28本发明的主路辅路专用道衔接入口同时进行自动到手动切换示意图(另一种
设计方案);
[0056]
图29本发明的辅路外侧专用道与支路交互的流程示意图;
[0057]
图30本发明的辅路外侧专用道汇入流程示意图;
[0058]
图31本发明的辅路外侧专用道汇出流程示意图。
具体实施方式
[0059]
下面对本发明技术方案进行详细说明,但是本发明的保护范围不局限于所述实施例。
[0060]
本发明的一种城市快速路主辅路车路协同专用道系统,包括以下内容:
[0061]
(1)主路内侧为自动驾驶专用道:以双向6车道的情形为例,设计了两种自动驾驶车辆进入和驶出内侧自动驾驶专用道的方案;
[0062]
(2)主路外侧为自动驾驶专用道:以双向6车道的情形为例,考虑到当主路外侧为自动驾驶专用道时,辅路车辆进出主路时会产生交汇,因此分别设计了两种辅路上的车辆(包括自动驾驶车辆和普通车辆)驶入主路和和两种主路上的车辆驶离主路的方案。另外,还设计了两种自动驾驶车辆进入和驶出内侧自动驾驶专用道的方案;
[0063]
(3)辅路内侧为自动驾驶专用道:当专用道位于主路外侧或者辅路内侧或者交替位于两者时,自动车辆由系统控制自动编队,为普通车辆离开主路留出空隙。出入口处设置等待区、信号灯,与自动车辆编队控制相结合,在合适的时间放行。出入口处的等待区同时也用作自动车辆的模式切换区,支持自动驾驶的车辆可在此处切换模式进入自动车道。入口处等待区前方可用作自动车辆的缓冲区和模式切换区,自动车道的车辆可在此离开自动车道,切换到手动驾驶。
[0064]
(4)辅路外侧为自动驾驶专用道与支路配合的场景。辅路为单向2车道,外侧为自动车道,内侧为手动车道。支路为双向4车道,图中,由南向北的外侧车道为模式切换区和缓冲区。手动自动切换:首先车辆通过模式切换区,若满足要求,完成手动模式到自动模式的切换,直行进入自动车道。否则,则驶入普通车道。自动手动切换:自动车辆直接驶出自动车道,完成自动模式到手动模式的切换过程。
[0065]
(5)自动驾驶专用车道交替位于城市快速路辅路外侧和主路外侧时的入口衔接设计;辅路内侧为普通车道,辅路外侧的自动车道在入口处变换到主路外侧。自动车辆由系统控制自动编队,普通车辆从自动车辆的空隙中进入主路。
[0066]
自动驾驶专用车道交替位于城市快速路主路外侧和辅路外侧时的出口衔接设计;主路外侧的自动车道在出口处变换到辅路外侧,辅路内侧为普通车道。自动车辆由系统控制自动编队,普通车辆从自动车辆的空隙中离开主路。
[0067]
实施例:
[0068]
如图1所示,本实施适用于但不仅限于北京市城市快速路二三四五环路、武汉二环路、南京快速路、天津快速路、哈尔滨四环路、长沙二环路、西安二环路、长春快速路灯。城市快速路车路协同自动驾驶系统模块包括:自动驾驶专用道/普通道切换模块,自动驾驶专用道汇入/汇出模块,自动驾驶专用道/普通道交叉模块。
[0069]
如图2所示,城市快速路车路协同自动驾驶系统中运行的车辆包括:自动车辆、普通车辆、普通行驶状态下自动车辆,并根据所有系统可检测车辆的状态决定专用车道/普通
车道交叉口信号灯状态,手动模式自动车辆和手动普通车辆服从信号灯控制,并在通过信号灯后进入各自目标车道。
[0070]
如图3所示,手动自动驾驶车辆由普通车道切换至自动车道时,首先车辆经过模式切换区时向系统发送模式切换请求,cavh控制中心判断若满足切换要求,则进入系统接管流程,若不满足则就近驶回普通车道。系统接管车辆后,控制车辆经过缓冲区完成加速过程,同时优化自动车辆速度并将自动车辆编组,形成若干车队。cavh控制中心则根据自动车道实时状态更新相关信号灯状态。至此车辆完成普通道切换至专用道过程。
[0071]
如图4所示,自动车辆由自动车道切换至普通车道时,首先车辆经过模式切换区时向系统发送模式切换请求,cavh控制中心判断若满足切换要求,则提示驾驶员接管车辆,若不满足则继续行驶在专用道。驾驶员接管车辆后,控制车辆经过缓冲区完成减速过程,进入普通车道。同时cavh控制中心优化专用道上剩余自动车辆速度并重新编组,形成若干车队。cavh控制中心则根据自动车道实时状态更新相关信号灯状态。至此车辆完成专用道切换至普通车道过程。
[0072]
如图5所示,有信号灯控制的专用道/普通道交叉口流程为,这一过程包含普通车辆通过交叉口后进入普通车道,和手动模式自动车辆通过交叉口后进入专用车道两个流程,这两个流程遵守同一套由cavh控制中心发布的信号灯指令。普通车辆行驶至交叉口时,若遇到红灯,则等待至信号灯转变为绿灯后,迅速按照道路标志通过路口进入目标普通车道。手动模式自动车辆行驶至交叉口前的模式切换区时,向cavh控制中心发送模式切换请求,cavh控制中心接受请求并控制车辆,若遇到红灯,则等待至信号灯转变为绿灯后,系统控制车辆进入目标自动车道。同时cavh控制中心优化专用道自动车辆速度并重新编组,形成若干车队。cavh控制中心则根据自动车道实时状态更新相关信号灯状态。至此车辆完成有信号灯控制的专用道/普通道交叉口流程。
[0073]
如图6所示,为主路内侧是自动驾驶专用道时,自动驾驶车辆进入专用道类型一;路段为双向6车道,最内侧为自动车道,中间车道设置模式切换区和缓冲区。首先车辆经过模式切换区完成手动切换为自动模式。并经过缓冲区加速汇入内侧自动车道。
[0074]
如图7所示,为主路内侧是自动驾驶专用道时,自动驾驶车辆驶出专用道类型一;路段为双向6车道,最内侧为自动车道,中间车道设置模式切换区和缓冲区。首先车辆缓冲区减速,再经过模式切换区完成自动切换为手动模式。
[0075]
如图8所示,为主路内侧是自动驾驶专用道时,自动驾驶车辆进入和驶出专用道类型二;路段为双向6车道,最内侧为部分自动车道,内侧车道设置模式切换区和缓冲区。手动自动切换:首先车辆通过模式切换区,若满足要求,完成手动模式到自动模式的切换,直行进入自动车道。否则,则右转驶入普通车道。自动手动切换:首先车辆经过缓冲区减速后进入模式切换区,将自动模式切换为手动模式,并直行进入普通车道,完成自动模式到手动模式的切换过程。
[0076]
如图9所示,为主路外侧是自动驾驶专用道时,入口处辅路车辆进入主路类型一;主路为双向6车道,最外侧为自动车道,主路一侧的辅路为单向2车道,辅路内侧车道上的普通车辆可以选择驶入为主路外侧是自动驾驶专用车道或主路上的普通车道。
[0077]
如图10所示,主路外侧是自动驾驶专用道时,入口处辅路车辆进入主路类型二;主路为双向6车道,最外侧为自动车道,主路一侧的辅路为单向2车道,辅路上的普通车辆按红
绿灯的指示进入主路,当绿灯亮时,自动驾驶车辆停止,辅路内侧车道上的普通车辆进入主路,当红灯亮时,自动驾驶车辆行驶,辅路内侧车道上的普通车辆等待。
[0078]
如图11所示,主路外侧是自动驾驶专用道时,出口处主路车辆驶出主路类型一;主路为双向6车道,最外侧为自动车道,主路一侧的辅路为单向2车道,当绿灯亮时,等待区的普通车辆驶离出口,自动驾驶车辆等待,当红灯亮时,等待区的普通车辆停车等待,自动驾驶车辆行驶。
[0079]
如图12所示,主路外侧是自动驾驶专用道时,出口处主路车辆驶出主路类型二;主路为双向6车道,最外侧为自动车道,主路一侧的辅路为单向2车道,主路中间车道的普通车辆如果想在该出口处驶离,则需要在方向切换区直行,反之,则切换到主路内侧车道。当绿灯亮时,主路中间车道的普通车辆直接驶离路口,自动驾驶车辆停止行驶,当红灯亮时,主路中间车道的普通车辆停车等待,自动驾驶的车辆可以选择直行或切换到手动模式驶离路口。
[0080]
如图13所示,主路外侧是自动驾驶专用道时,自动驾驶车辆主路进入专用道类型一;路段为双向6车道,最外侧为自动车道,中间车道设置模式切换区和缓冲区。首先车辆经过模式切换区完成手动切换为自动模式。并经过缓冲区加速汇入外侧自动车道。
[0081]
如图14所示,主路外侧是自动驾驶专用道时,自动驾驶车辆主路驶出专用道类型一;路段为双向6车道,最外侧为自动车道,中间车道设置缓冲区和模式切换区。首先车辆缓冲区减速,再经过模式切换区完成自动切换为手动模式。
[0082]
如图15所示,主路外侧是自动驾驶专用道时,自动驾驶车辆进入和驶出专用车道类型二;路段为双向6车道,最外侧为部分自动车道,外侧车道设置模式切换区和缓冲区。手动自动切换:首先车辆通过模式切换区,若满足要求,完成手动模式到自动模式的切换,直行进入自动车道。否则,则左转驶入普通车道。自动手动切换:首先车辆经过缓冲区减速后进入模式切换区,将自动模式切换为手动模式,并直行进入普通车道,完成自动模式到手动模式的切换过程。
[0083]
如图16所示,为自动驾驶专用车道位于城市快速路辅路内侧时的入口为:辅路内侧为自动车道,外侧为普通车道。自动车辆由系统控制自动编队,为普通车辆进入主路留出空隙。普通车道进入主路的入口处设置信号灯,与自动车辆编队控制相结合,在合适的时间放行。
[0084]
如图17所示,为自动驾驶专用车道位于城市快速路辅路内侧时的出口为;辅路内侧为自动车道,外侧为普通车道。自动车辆由系统控制自动编队,为普通车辆离开主路留出空隙。普通车道离开主路的出口处设置信号灯,与自动车辆编队控制相结合,在合适的时间放行。
[0085]
如图18所示,为自动驾驶专用车道交替位于城市快速路辅路内侧和主路外侧时的入口为;辅路外侧为普通车道,辅路内侧的自动车道在入口处变换到主路外侧。自动车辆由系统控制自动编队,为普通车辆进入主路留出空隙。普通车道进入主路的入口处设置信号灯,与自动车辆编队控制相结合,在合适的时间放行。
[0086]
如图19所示,为自动驾驶专用车道交替位于城市快速路辅路内侧和主路外侧时的入口为;辅路外侧为普通车道,辅路内侧的自动车道在入口处变换到主路外侧。自动车辆由系统控制自动编队,为普通车辆进入主路留出空隙。普通车道进入主路的入口处设置信号
灯,与自动车辆编队控制相结合,在合适的时间放行。(自动车辆和普通车辆通过两个邻近入口进入主路,增加一个等待区避免影响辅路普通车流)
[0087]
如图20所示,自动驾驶专用车道交替位于城市快速路主路外侧和辅路内侧时的出口设计为;主路外侧的自动车道在出口处变换到辅路内侧,辅路外侧为普通车道。自动车辆由系统控制自动编队,为普通车辆离开主路留出空隙。普通车道离开主路的出口处设置信号灯,与自动车辆编队控制相结合,在合适的时间放行。
[0088]
如图21所示,自动驾驶专用车道位于城市快速路辅路内侧时的入口设计为;辅路内侧为自动车道,外侧为普通车道。自动车辆由系统控制自动编队,为普通车辆进入主路留出空隙。普通车道进入主路的入口处设置信号灯,与自动车辆编队控制相结合,在合适的时间放行。普通车辆的等待区同时也用作自动车辆的模式切换区,支持自动驾驶的车辆可在此处切换模式进入自动车道。
[0089]
图22为自动驾驶专用车道位于城市快速路辅路内侧时的出口设计;辅路内侧为自动车道,外侧为普通车道。自动车辆由系统控制自动编队,为普通车辆离开主路留出空隙。普通车道离开主路的出口处设置信号灯,与自动车辆编队控制相结合,在合适的时间放行。普通车辆的等待区同时也用作自动车辆的模式切换区,支持自动驾驶的车辆可在此处切换模式进入自动车道。
[0090]
图23为自动驾驶专用车道交替位于城市快速路辅路内侧和主路外侧时的入口设计;辅路外侧为普通车道,辅路内侧的自动车道在入口处变换到主路外侧。自动车辆由系统控制自动编队,为普通车辆进入主路留出空隙。普通车道进入主路的入口处设置信号灯,与自动车辆编队控制相结合,在合适的时间放行。普通车辆的等待区同时也用作自动车辆的模式切换区,支持自动驾驶的车辆可在此处切换模式进入自动车道。
[0091]
图24为自动驾驶专用车道交替位于城市快速路辅路内侧和主路外侧时的入口设计;辅路外侧为普通车道,辅路内侧的自动车道在入口处变换到主路外侧。自动车辆由系统控制自动编队,为普通车辆进入主路留出空隙。普通车道进入主路的入口处设置信号灯,与自动车辆编队控制相结合,在合适的时间放行。(自动车辆和普通车辆通过两个邻近入口进入主路,增加一个等待区避免影响辅路普通车流)普通车辆的等待区同时也用作自动车辆的模式切换区,支持自动驾驶的车辆可在此处切换模式进入自动车道。
[0092]
图25为自动驾驶专用车道交替位于城市快速路主路外侧和辅路内侧时的出口设计;主路外侧的自动车道在出口处变换到辅路内侧,辅路外侧为普通车道。自动车辆由系统控制自动编队,为普通车辆离开主路留出空隙。普通车道离开主路的出口处设置信号灯,与自动车辆编队控制相结合,在合适的时间放行。普通车辆的等待区同时也用作自动车辆的模式切换区,支持自动驾驶的车辆可在此处切换模式进入自动车道。
[0093]
图26为自动驾驶专用车道位于城市快速路辅路内侧时的入口设计;辅路内侧为自动车道,外侧为普通车道。自动车辆由系统控制自动编队,为普通车辆进入主路留出空隙。普通车道进入主路的入口处设置信号灯,与自动车辆编队控制相结合,在合适的时间放行。等待区前方可用作自动车辆的缓冲区和模式切换区,自动车道的车辆可在此离开自动车道,切换到手动驾驶。
[0094]
图27为自动驾驶专用车道交替位于城市快速路辅路内侧和主路外侧时的入口设计;辅路外侧为普通车道,辅路内侧的自动车道在入口处变换到主路外侧。自动车辆由系统
控制自动编队,为普通车辆进入主路留出空隙。普通车道进入主路的入口处设置信号灯,与自动车辆编队控制相结合,在合适的时间放行。等待区前方可用作自动车辆的缓冲区和模式切换区,自动车道的车辆可在此离开自动车道,切换到手动驾驶。
[0095]
图28为自动驾驶专用车道交替位于城市快速路辅路内侧和主路外侧时的入口设计;辅路外侧为普通车道,辅路内侧的自动车道在入口处变换到主路外侧。自动车辆由系统控制自动编队,为普通车辆进入主路留出空隙。普通车道进入主路的入口处设置信号灯,与自动车辆编队控制相结合,在合适的时间放行。(自动车辆和普通车辆通过两个邻近入口进入主路,增加一个等待区避免影响辅路普通车流)等待区前方可用作自动车辆的缓冲区和模式切换区,自动车道的车辆可在此离开自动车道,切换到手动驾驶。
[0096]
图29为辅路外侧专用道与支路配合的场景。辅路为单向2车道,外侧为自动车道,内侧为手动车道。支路为双向4车道,图中,由南向北的外侧车道为模式切换区和缓冲区。手动自动切换:首先车辆通过模式切换区,若满足要求,完成手动模式到自动模式的切换,直行进入自动车道。否则,则驶入普通车道。自动手动切换:自动车辆直接驶出自动车道,完成自动模式到手动模式的切换过程。
[0097]
图30为自动驾驶专用车道交替位于城市快速路辅路外侧和主路外侧时的入口设计;辅路内侧为普通车道,辅路外侧的自动车道在入口处变换到主路外侧。自动车辆由系统控制自动编队,普通车辆从自动车辆的空隙中进入主路。
[0098]
图31为自动驾驶专用车道交替位于城市快速路主路外侧和辅路外侧时的出口设计;主路外侧的自动车道在出口处变换到辅路外侧,辅路内侧为普通车道。自动车辆由系统控制自动编队,普通车辆从自动车辆的空隙中进入主路。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1