基于车路协同与自动驾驶的交叉口智能管控方法与流程
[0001]
本发明涉及道路交叉口车辆控制技术领域,尤其涉及一种基于车路协同与自动驾驶的交叉口智能管控方法。
背景技术:
[0002]
交叉口是城市道路中最容易产生交通延误与拥堵的地点,其信号控制策略与方法直接影响着交叉口的通行能力。安全高效的交叉口智能管控方法能最大限度地利用交叉口的通行能力,减少车辆延误,缓解交通拥堵。
[0003]
现有技术中的交叉口控制方法均是借助于信号灯来实现一种“断面式”的通行时间分隔,使相互冲突的交通流在不同的时间区段内分批次通过交叉口,这种控制方法在一定程度上造成了交叉口通行时间与空间的浪费。此外,当前针对车路协同与自动驾驶条件下的交叉口控制优化研究,大多是基于信号配时与车速引导展开,仍然没有摆脱传统的信号灯系统,无法使车辆根据交通流实时状况进行自适应车速调整。
[0004]
而在智能交通基础设施布局完备的环境下,依托于v2x车联网技术、高精度地图及5g通信等先进技术,可以通过云端控制中心实现交叉口的智能化、精细化交通管控。因而,交叉口的优化控制方法依然存在较大的改进空间。
技术实现要素:
[0005]
为解决上述技术问题,本发明公开了一种基于车路协同与自动驾驶的交叉口智能管控方法,使各方向车辆交替穿插通过交叉口冲突区域,实现不停车通过交叉口,从而提高道路交叉口通行能力,减少行车时间延误。
[0006]
为实现上述目的,本发明采用下述技术方案:
[0007]
基于车路协同与自动驾驶的交叉口智能管控方法,包括以下步骤:
[0008]
步骤一,在自动驾驶车辆到达调控区入口端时,自动驾驶车辆通过网联通信系统将此刻的行驶状态信息上传至云端控制中心;
[0009]
步骤二、云端控制中心通过基于时空间隙动态分配的速度决策方法为进入调控区的自动驾驶车辆计算出通过交叉口的最优安全车速,并通过网联通信系统将最优安全车速反馈给自动驾驶车辆;
[0010]
步骤三、自动驾驶车辆在调控区路段内接收到云端控制中心反馈的最优安全车速后,按匀加速或匀减速运动对当前车速进行调整,当自动驾驶车辆在调控区内调整至最优安全车速后,开始保持匀速行驶,直至驶离交叉口,实现各方向自动驾驶车辆不停车交替穿插通过交叉口。
[0011]
作为本发明进一步的优选,步骤一中,自动驾驶车辆在进入调控区前按照行驶路径进行换道,调控区内不允许变道与超车;云端控制中心的交叉口控制区域范围覆盖交叉口和各方向的调控区路段,并将所有处于交叉口控制区域内的自动驾驶车辆在交叉口关键节点的通行时间点进行计算存储。
[0012]
作为本发明进一步的优选,步骤二中,基于时空间隙动态分配的速度决策方法具体为:(1)云端控制中心根据接收到的进入调控区自动驾驶车辆前车的行驶状态信息,按照自动驾驶车辆在整个交叉口通行过程中与前车之间的距离不得小于最小安全车距为约束条件,计算出自动驾驶车辆不与同车道前车发生碰撞的速度取值范围;
[0013]
(2)云端控制中心对交叉口控制区域内的路况信息和自动驾驶车辆行驶状态信息进行实时感知与存储,根据接收到的进入调控区自动驾驶车辆的行驶状态信息,计算出自动驾驶车辆在交叉口内各个冲突区域的范围,并根据交叉口控制区域内现存所有自动驾驶车辆的位置信息,确定此刻交叉口控制区域内与自动驾驶车辆存在冲突关联的所有自动驾驶车辆;
[0014]
(3)云端控制中心根据接收到的进入调控区车辆和交叉口控制区域内现存所有车辆的行驶状态信息,计算出车辆在各个冲突区域中能够与对应的冲突车辆错开的安全通行时间,进而计算出车辆不与交叉口内其他行驶方向的冲突车辆发生碰撞的速度取值范围。
[0015]
作为本发明进一步的优选,进入调控区的自动驾驶车辆为a车,其不与同车道前车发生碰撞的速度取值范围,计算方法如下:
[0016]
设定:t
a0(f)
表示a车前车在a车到达交叉口调控区时的行驶时间;v
’
表示a车前车在a车到达交叉口调控区时的行驶速度;t
(f)
表示a车前车进入控制区域后的行驶时间;x
(f)
表示a车前车在进入控制区域后的行驶距离;a
(f)
表示a车前车进行速度调整时的加速度;t
v(f)
表示a车前车速度调定时的行驶时间;x
v(f)
表示a车前车速度调定时的行驶距离;t
w(f)
表示a车前车离开交叉口时的行驶时间;v
p(f)
表示a车前车的最优安全速度;x
初始
表示a车进入控制区域时与前车之间的初始距离;v
0(a)
表示a车到达交叉口调控区时的初始车速;t
(a)
表示a车进入控制区域后的行驶时间;x
(a)
表示a车进入控制区域后的行驶距离;a
(a)
表示a车进行速度调整时的加速度;t
v(a)
表示a车速度调定时的行驶时间;x
v(a)
表示a车速度调定时的行驶距离;v
p(a)
表示a车的最优安全速度。
[0017]
当t
a0(f)
≤t
v(f)
时,即a车进入调控区时,前车速度还未调定,则分为以下两种情况:
[0018]
情况一、若t
v(a)
≤t
v(f)-t
a0(f)
,即a车速度调定时,前车速度还未调定,
[0019][0020]
情况二、若t
v(a)
>t
v(f)-t
a0(f)
,即前车速度调定时,a车速度还未调定,
[0021][0022]
当t
a0(f)
>t
v(f)
时,即a车进入调控区时,前车速度已经调定,则:
[0023][0024]
a车不与同车道前车发生碰撞的速度约束条件为:x
(f)-x
(a)
≥1,即车辆在整个交叉口通行过程中与前车之间的距离不得小于最小安全车距1m。
[0025]
上述式中的未知参数t
v(a)
和x
v(a)
均为与v
p(a)
相关的函数,如下所示:
[0026][0027][0028]
上式中实际未知参数为t
(a)
和v
p(a)
,使不同条件的式子在对应区间内取最小值时能够满足约束条件,即t
(a)
=t*时(t*表示各条件中使x
(f)-x
(a)
取最小值时的t
(a)
值),min(x
(f)-x
(a)
)≥1,可求得v
p(a)
的取值范围φ
1
。
[0029]
作为本发明进一步的优选,进入调控区的自动驾驶车辆为a车,其不与交叉口内其他行驶方向的冲突自动驾驶车辆发生碰撞的速度取值范围,计算方法如下:
[0030]
计算出a车能够安全通过路径上的第一个冲突区域的v
p(a)
值域安全通过路径上第二个冲突区域的v
p(a)
值域安全通过路径上第三个冲突区域的v
p(a)
值域安全通过路径上第四个冲突区域的v
p(a)
值域
[0031]
将上述四个v
p(a)
值域条件联立,
[0032][0033]
即可得到自动驾驶车辆不与交叉口内其他行驶方向冲突车辆发生碰撞的v
p(a)
取值范围φ
2
。
[0034]
作为本发明进一步的优选,将a车不与同车道前车发生碰撞的速度取值范围、不与交叉口内其他行驶方向的冲突自动驾驶车辆发生碰撞的速度取值范围进行结合,得到,
[0035][0036]
即可得车辆a不与同车道前车发生碰撞且不与交叉口内其他行驶方向冲突车辆发生碰撞的安全速度v
p(a)
的可取值域。
[0037]
本发明中,自动驾驶车辆的行驶状态信息包括行驶速度、所处位置、行驶轨迹方向;交叉口关键节点包括:调控区起始点、调控区内最优安全车速调定点、交叉口各冲突区域边界点、交叉口驶离点。
[0038]
自动驾驶车辆在进入调控区后,需要保证不与同车道前车发生碰撞、不与交叉口内其他行驶方向的冲突车辆发生碰撞。云端控制中心根据接收到的进入调控区车辆和交叉口控制区域内现存所有车辆的行驶状态信息,计算出车辆不与同车道前车发生碰撞的速度
取值范围,以及不与交叉口内其他行驶方向的冲突车辆发生碰撞的速度取值范围。
[0039]
具体地:
[0040]
计算车辆不与同车道前车发生碰撞的速度取值范围时:
[0041]
车辆的最大行驶速度受到同车道前车速度的制约,在整个交叉口通行过程中车辆不能超越同车道前车,且不发生碰撞。云端控制中心按照车辆在整个交叉口通行过程中与前车之间的距离不得小于最小安全车距为约束条件,结合车辆前车的实时运动状况计算出车辆不与同车道前车发生碰撞的速度取值范围。
[0042]
计算车辆不与交叉口内其他行驶方向的冲突车辆发生碰撞的速度取值范围时:
[0043]
云端控制中心对交叉口控制区域内的路况信息和车辆行驶状态信息进行实时感知与存储,根据接收到的进入调控区车辆的行驶状态信息,计算出车辆在交叉口内各个冲突区域的范围,并根据交叉口控制区域内现存所有车辆的位置信息,确定此刻交叉口控制区域内与车辆存在冲突关联的所有车辆。
[0044]
云端控制中心根据接收到的进入调控区车辆和交叉口控制区域内现存所有车辆的行驶状态信息,计算出车辆在各个冲突区域中能够与对应的冲突车辆错开的安全通行时间,进而计算出车辆不与交叉口内其他行驶方向的冲突车辆发生碰撞的速度取值范围。
[0045]
本发明的有益效果是,
[0046]
(1)该方法通过云端控制中心使交叉口实现自适应智能化、精细化管控,能够提高道路交叉口通行能力,缓解交通拥堵;
[0047]
(2)使各方向车辆能够不停车通过交叉口,充分利用交叉口通行空间,降低车辆延误,提高道路交叉口通行效率;
[0048]
(3)减少车辆在交叉口通行过程中的油耗与污染物排放,促进绿色交通发展;
[0049]
(4)通过云端控制中心对交叉口车辆进行管控,有助于进一步实现区域交通协调控制。
附图说明
[0050]
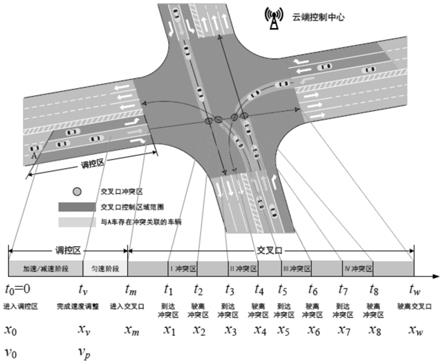
图1为本发明实施例中交叉口控制区域范围及关键节点通行时间示意图;
[0051]
图2为本发明实施例中交叉口冲突区域范围示意图;
[0052]
图3为本发明实施例中交叉口道路渠化及冲突分析示意图;
[0053]
图4为本发明实施例中车辆寻求时空间隙通过交叉口冲突区域示意图。
具体实施方式
[0054]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0055]
在车路协同环境下,道路上的自动驾驶车辆(该部分中也可简称车辆)可以实现车与车、车与路、车与云的实时信息交互与共享,因此云端控制中心能够实时掌握道路交叉口控制区域范围内所有车辆的行驶状态信息,进而结合环境模型为车辆提供行驶控制方案,实现交叉口智能管控。在此条件下,自动驾驶车辆通过与云端控制中心间的信息交互获取
相应的行驶控制方案,并通过车载控制系统执行精准智能的驾驶操作,使车辆在特定区域内达到目标行驶状态。
[0056]
本发明提出了一种基于车路协同与自动驾驶的交叉口智能管控方法,将一定长度距离的交叉口进车口衔接道路设定为调控区,其长度范围可根据不同交叉口的实际交通情况进行规划。
[0057]
车辆在进入调控区前按照行驶路径进行换道,调控区内不允许变道与超车;在车辆到达调控区入口端时,车辆通过网联通信系统将该车此刻的行驶状态信息上传至云端控制中心,云端控制中心的交叉口控制区域范围覆盖交叉口和各方向的调控区路段。
[0058]
在车辆进入调控区后,云端控制中心通过基于时空间隙动态分配的速度决策方法计算出车辆通过交叉口的最优安全车速,该决策方法能够在保证车辆不与同车道前车发生碰撞且不与交叉口内其他行驶方向的冲突车辆发生碰撞的前提下,使车辆速度尽可能快,通过交叉口所用时间尽可能短。云端控制中心通过网联通信系统将决策出的最优安全车速反馈予车辆,车辆在调控区路段内按匀加速或匀减速运动对当前车速进行调整,当调整至最优安全车速后保持匀速行驶,直至驶离交叉口,从而实现各方向车辆不停车交替穿插通过交叉口。
[0059]
本发明具体实现过程,包括以下步骤:
[0060]
s1、如图1所示,云端控制中心对交叉口控制区域内的路况信息和车辆行驶状态信息进行实时感知与存储,路况信息包括道路构造、车道宽度、交叉口转弯半径、路面湿滑度等,车辆行驶状态信息包括行驶速度、所处位置、行驶轨迹方向。
[0061]
云端控制中心对所有已经决策出交叉口最优安全车速、还处于交叉口控制区域范围内的车辆在交叉口关键节点的通行时间点进行计算存储,交叉口关键节点包括调控区起始点、调控区内最优安全车速调定点、交叉口各冲突区域边界点、交叉口驶离点。
[0062]
s2、当某一辆车a到达调控区时,云端控制中心通过该车此时的行驶状态信息,计算出该车辆在交叉口内各个冲突区域的范围,如图2所示;并根据交叉口控制区域内现存所有车辆的位置信息,确定此刻交叉口控制区域内与a车存在冲突关联的所有车辆。
[0063]
s3、车辆a在进入调控区后,其行驶速度受到同车道前车速度的制约,即在整个交叉口通行过程中不能超越同车道前车,且不发生碰撞。为保证行车安全,本发明将车辆跟驰最小安全距离设定为1m。云端控制中心按照a车在整个交叉口通行过程中与前车之间的距离不得小于最小安全车距为约束条件,结合a车前车的实时运动状况计算出a车不与同车道前车发生碰撞的速度取值范围。
[0064]
详细计算方法如下:
[0065]
其中,t
a0(f)
表示a车前车在a车到达交叉口调控区时的行驶时间;v
’
表示a车前车在a车到达交叉口调控区时的行驶速度;t
(f)
表示a车前车进入控制区域后的行驶时间;x
(f)
表示a车前车在进入控制区域后的行驶距离;a
(f)
表示a车前车进行速度调整时的加速度;t
v(f)
表示a车前车速度调定时的行驶时间;x
v(f)
表示a车前车速度调定时的行驶距离;t
w(f)
表示a车前车离开交叉口时的行驶时间;v
p(f)
表示a车前车的最优安全速度;x
初始
表示a车进入控制区域时与前车之间的初始距离。
[0066]
v
0(a)
表示a车到达交叉口调控区时的初始车速;t
(a)
表示a车进入控制区域后的行驶时间;x
(a)
表示a车进入控制区域后的行驶距离;a
(a)
表示a车进行速度调整时的加速度;
t
v(a)
表示a车速度调定时的行驶时间;x
v(a)
表示a车速度调定时的行驶距离;v
p(a)
表示a车的最优安全速度。
[0067]
当t
a0(f)
≤t
v(f)
时,即a车进入调控区时,前车速度还未调定,分为以下两种情况:
[0068]
情况一、若t
v(a)
≤t
v(f)-t
a0(f)
,即a车速度调定时,前车速度还未调定,
[0069][0070]
情况二、若t
v(a)
>t
v(f)-t
a0(f)
,即前车速度调定时,a车速度还未调定,
[0071][0072]
当t
a0(f)
>t
v(f)
时,即a车进入调控区时,前车速度已经调定,则:
[0073][0074]
a车不与同车道前车发生碰撞的速度约束条件为:x
(f)-x
(a)
≥1;
ꢀꢀꢀꢀ
(4)
[0075]
上述式中的未知参数t
v(a)
和x
v(a)
均为与v
p(a)
相关的函数,如下所示:
[0076][0077][0078]
因此,上述式中实际未知参数为t
(a)
和v
p(a)
,使不同条件的式子在对应区间内取最小值时能够满足约束条件,即t
(a)
=t*时(t*表示各条件中使x
(f)-x
(a)
取最小值时的t
(a)
值),min(x
(f)-x
(a)
)≥1,可求得v
p(a)
的取值范围φ1。
[0079]
s4、由于右转车辆在通过交叉口过程中与其他方向的行驶车辆不存在交通冲突,故云端控制中心只需要对直行车辆和左转车辆在交叉口的安全通行时间进行计算决策,进而确定车辆不与交叉口内其他行驶方向的冲突车辆发生碰撞的速度取值范围。如图3所示,根据交叉口内的车辆行驶路径轨迹,直行与左转方向的车辆行驶路径均和四条其他方向的路径间存在冲突关联。
[0080]
以ws方向车辆为例,其路径上的第一个冲突区域为ns方向车辆路径上的第四个冲突区域,第二个冲突区域为sl方向车辆路径上的第二个冲突区域,第三个冲突区域为el方向车辆路径上的第三个冲突区域,第四个冲突区域为ss方向车辆路径上的第一个冲突区域。
[0081]
当ws车道有一辆车a驶入交叉口调控区时,云端控制中心检测到此时在交叉口控制区域内与w
s
车道a车存在冲突关联的ns、sl、el、ss四个方向上各有m辆车、n辆车、p辆车、q
辆车,这四个方向的冲突车辆构成四个冲突车队。
[0082]
如图4所示,a车通过路径上第一个冲突区域的时间与ns方向冲突车辆错开,存在三种情况:
[0083]
(1)在冲突车队之前通过,即a车在冲突车队中的第一辆车到达冲突区域之前离开冲突区域,约束条件为:
[0084]
(2)在冲突车队之间穿过,即a车在冲突车队中的第j辆车离开冲突区域之后到达冲突区域,在第j+1辆车到达冲突区域之前离开冲突区域,约束条件为:
[0085][0086]
(3)在冲突车队之后通过,即a车在冲突车队中的最后一辆车离开冲突区域之后到达冲突区域,约束条件为:
[0087]
其中,t
a0(ns1)
、t
a0(nsj)
、t
a0(nsj+1)
、t
a0(nsm)
分别表示ns方向冲突车队中的第1辆车、第j辆车、第j+1辆车、第m辆车在a车到达交叉口调控区时的行驶时间;t
7(ns1)
表示ns方向冲突车队中的第1辆车到达其行驶路径上第四个冲突区域的时间;t
8(nsj)
表示ns方向冲突车队中的第j辆车离开其行驶路径上第四个冲突区域的时间;t
7(nsj+1)
表示ns方向冲突车队中的第j+1辆车到达其行驶路径上第四个冲突区域的时间;t
8(nsm)
表示ns方向冲突车队中的第m辆车离开其行驶路径上第四个冲突区域的时间。因为云端控制中心对交叉口控制区域内的路况信息和车辆行驶状态信息进行着实时感知与存储,所以上述ns方向冲突车队中各车辆在交叉口关键节点的行驶时间均为已知值。
[0088]
其中,t
i(a)
(i=1,2,...,8)表示a车通过各冲突区域边界点的行驶时间;x
i(a)
表示a车通过各冲突区域边界点时的行驶距离,如图1中所示。在步骤s2中,云端控制中心计算出a车在交叉口内各个冲突区域的范围,结合交叉口的路况信息可确定出x
i(a)
的值。
[0089]
t
i(a)
均为与v
p(a)
相关的函数,如下所示:
[0090][0091]
当v
p(a)
满足上述三种情况之一,a车即能够安全通过路径上的第一个冲突区域,为提高车辆通行效率,取三种情况中v
p(a)
尽可能大的值域
[0092]
通过相同方法依次计算出a车安全通过路径上第二个冲突区域的v
p(a)
值域安全通过路径上第三个冲突区域的v
p(a)
值域安全通过路径上第四个冲突区域的v
p(a)
值域
[0093]
将上述四个v
p(a)
值域条件联立,如下所示:
[0094]
[0095]
即可得到a车不与交叉口内其他行驶方向冲突车辆发生碰撞的v
p(a)
取值范围φ
2
。
[0096]
s5、将步骤s3和s4确定的速度条件结合,如下所示:
[0097][0098]
即可求得车辆a不与同车道前车发生碰撞且不与交叉口内其他行驶方向冲突车辆发生碰撞的安全速度v
p(a)
的可取值域。在满足基本安全条件的前提下,为提高车辆通行效率,v
p(a)
的取值尽可能大,该值即为车辆a的交叉口通行最优安全车速。
[0099]
s6、云端控制中心通过网联通信系统将决策出的最优安全车速反馈予车辆,车辆通过车载控制系统在调控区路段内按匀加速或匀减速运动对当前车速进行调整,当调整至最优安全车速后保持匀速行驶,直至驶离交叉口,从而实现车辆不停车通过交叉口。
[0100]
当然,上述说明并非是对本发明的限制,本发明也并不仅限于上述举例,本技术领域的技术人员在本发明的实质范围内所做出的变化、改型、添加或替换,也应属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1