一种基于它车辆轨迹预测的智能车辆风险评估方法与流程
[0001]
本发明涉及自动驾驶技术领域,具体涉及一种基于它车辆轨迹预测的智能车辆风险评估方法。
背景技术:
[0002]
伴随着自动驾驶领域水平的提高,人们充分意识到智能汽车的决策和轨迹规划需要在对周围交通环境充分认知的基础上进行,也就是说,车辆需要不断地对周围环境感知、理解,继而对于未来交通态势的发展做出一定的预测,方可做出高质量的行驶决策和规划。这一点已经被很多研究者关注,并投入大量研究工作且获得一定的研究成果,其集中在以下两个方面:1.对于多车道环境下,预测主车周围车辆的行驶轨迹,作为主车轨迹规划的输入;2.建立环境风险评估模型,根据轨迹规划的需要提供代表一定物理意义的风险指数,指导智能车辆的规划。
[0003]
显然,这些工作表明为智能车辆轨迹规划需要有一定时效性的交通环境认知,以便对于高威胁的交通对象能够及早得做出应对,从而提升智能车辆的规划性能(即规划的有效时长)。此外,提升车辆安全,更重要的提升车辆行驶的稳定性及乘客的舒适性。同时交通安全存在隐患的时候进行实时监测和预警,提高车辆的安全性,防止交通事故的发生。
[0004]
因此,为了能保证总体交通情况的安全性,在自主车辆作出决策之前需要对智能车辆的轨迹预测和风险评估有一个综合的考量。基于轨迹预测的风险评估方法是通过对未来一段时间周围车道的车辆行驶轨迹的预测,结合自主车辆的行驶轨迹来评估两者轨迹碰撞发生危险的可能性。常见的基于轨迹预测的风险评估方法包括:基于车辆状态的风险评估方法,该方法是假设障碍物始终以当前的运动状态行驶;基于驾驶意图的风险评估方法,该方法指的是需要根据交通车的驾驶意图的轨迹预测结果来进行风险评估;基于交互的风险评估方法,该方法在自主车辆驾驶意图的基础上考虑了自主车辆与周围车辆之间的相互作用以及相互影响。由于在实际交通中需要时刻关注周围车辆、行人和交通信号等信息,配合行为推理、轨迹预测算法对交通参与者未来的运动做出合理的预测及风险评估,并基于此来完成本车的决策和轨迹规划。因此,在自动驾驶系统中考虑具有交互性的风险评估方法研究更具有社会意义。
[0005]
综上所述,为了保证交通安全以及行车效率,一方面需要将智能车辆的行为预测与风险评估方法相结合,另一方面还需要通过基于交互式的风险评估方法来应对环境中实时的动态变化,从而得到更加精确的行为决策。
[0006]
申请号为cn202010248715.4中国专利文献,是一种基于深度卷积神经网络和交叉口的安全评估方法,该方法的轨迹提取主要基于人工标定所得,需要耗费大量的人力物力对轨迹进行获取,并且无法实施反映风险水平。
[0007]
申请号为cn202010088791.3中国专利文献,提出了一种基于车辆加速度的碰撞风险评估,利用的是视频中提取的轨迹来直接进行风险评估,但实际上完整的风险评估过程包括轨迹预测和风险评估两个部分,在没有考虑轨迹预测的前提之下进行风险的评估会导
致只能关注某一时刻的风险,而无法考虑到一个时间段内的风险。
[0008]
申请号为cn 201911233101.2中国专利文献,是一种驾驶风险评估方法,该方法对于无人驾驶车辆的风险评估是依赖车辆之间的通信,且只考虑了历史轨迹,没有考虑其他车辆未来的轨迹,所以这种方法会使得模型缺乏准确性以及其鲁棒性降低。
技术实现要素:
[0009]
为了确保自动驾驶的安全性,智能驾驶系统必须能检测到危险且有足够的应对时间,以避免或减轻碰撞的发生,故本发明提出了一种基于它车辆轨迹预测的智能车辆风险评估方法。
[0010]
为实现上述目的,本申请的技术方案为:一种基于它车辆轨迹预测的智能车辆风险评估方法,包括轨迹预测步骤和威胁评估步骤;
[0011]
所述轨迹预测步骤采用深度学习算法,利用ngsim数据集训练和评估行为预测模型,实现驾驶意图分类,得到自主车辆的轨迹概率分布;
[0012]
所述威胁评估步骤通过车辆风险评估函数来定量、客观地评估每个状态下的威胁,所述车辆风险评估函数包括碰撞时间ttc、车头时距th和增强碰撞时间ettc。
[0013]
进一步的,所述行为预测模型包括意图识别模型和轨迹预测模型。
[0014]
进一步的,所述轨迹预测步骤的具体实现方式为:
[0015]
构建基于长短时记忆网络结构的车辆行驶意图识别模型;
[0016]
对公开数据集ngsim进行数据预处理,获取车辆变道的轨迹数据,用于训练和评估行为预测模型;
[0017]
通过所述意图识别模型输出车辆行驶意图数据;
[0018]
向轨迹预测模型输入预处理后的车辆行驶数据以及车辆行驶意图数据,得到车辆轨迹概率分布。
[0019]
进一步的,所述构建基于长短时记忆网络结构的车辆行驶意图识别模型,具体为:设定车辆自身特征及其邻居特征选择的嵌入维度为64,长短时记忆网络的隐藏维度为128,选择学习率为0:000125,使用soft-max交叉熵损失作为训练损失:
[0020][0021]
其中,y
′
i
是第i个车道改变意图的真实标签,y
′
i
=1表示意图存在,y
′
i
=0表示意图不存在,其中i={1,2,3};y
′
1
是车辆向左换道的意图,y
′
2
是跟随车道的意图,y
′
3
是车辆向右换道的意图,p
j
是换道的正确意图,p
j
=(p
1
,p
2
,p
3
),为意图识别模型输出的意图类别向量,p
1
,p
2
,p
3
分别代表向左换道、直线行驶、向右换道的3种意图类别。
[0022]
进一步的,所述对公开数据集ngsim进行数据预处理,具体为:从数据集ngsim中提取多个车辆轨迹数据序列,对于每个车辆轨迹数据序列的训练集和测试集按照4:1的比例进行分配,获取车辆变道的轨迹数据,包含左变道数据、不变道数据、右变道数据。
[0023]
更进一步的,所述向轨迹预测模型输入预处理后的车辆行驶数据以及车辆行驶意图数据,得到车辆轨迹概率分布,具体为:
[0024]
采用长短时记忆网络构建轨迹预测模型的编码器和解码器,用于提取车辆行驶数据以及车辆行驶意图数据;
[0025]
使用混合密度网络作为行为预测模型的输出层来预测输出的车辆轨迹概率分布:
[0026]
p(t|m)=∑p
π,μ,σ
(t
j
|p
j
,m)p(p
j
|m)
[0027]
其中:t为意图识别模型输出,m为模型的输入量,p
π,μ,σ
(t
j
|p
j
,m)是解码器经过行为预测模型处理后输出的轨迹预测信息,p
j
是正确的换道意图;π为分配系数,μ为均值,σ为标准差。
[0028]
进一步的,所述威胁评估步骤通过车辆风险评估函数来定量、客观地评估每个状态下的威胁,具体为:
[0029]
获得自主车辆以及周围车辆的行驶轨迹,根据行为预测模型得到自主车辆的行驶轨迹如下所示:
[0030]
p(t|m)=∑p
π,μ,σ
(t
j
|p
j
,m)p(p
j
|m)
[0031]
其中:t为意图识别模型输出,m为模型的输入量,p
π,μ,σ
(t
j
|p
j
,m)是解码器经过行为预测模型处理后输出的轨迹预测信息,p
j
是正确的换道意图;π为分配系数,μ为均值,σ为标准差;周围车辆的行驶轨迹如下所示:
[0032][0033]
式中,以汽车所在位置为坐标原点,速度方向为x轴建立坐标系,l为换道过程的纵向位移,w为横向位移;
[0034]
通过碰撞时间ttc和车头时距th的指标进行单车道风险评估;
[0035]
通过碰撞时间ttc和增强碰撞时间ettc进行多车道风险评估,针对旁车道车辆换道并线的工况,采用估算旁车道车辆进入自主车辆行驶区域时间的方式进行危险评估。
[0036]
本发明能够取得以下技术效果:
[0037]
1、针对于轨迹预测是一个时间序列问题,正是由于长短时记忆网络在序列学习和生成任务中非线性时间依赖性建模的成功,其在处理和预测时间序列中间隔和延迟相对较长的重要事件上有强大的能力,并且长短时记忆网络本身的结构特点更有助于预测长时域的轨迹。
[0038]
2、为了克服物理模型和机动模型的局限性,应用基于交互的轨迹预测方法,故使用长短时记忆网络和混合密度网络相结合的方法来对车辆的轨迹进行预测。为了模拟其他汽车对决策过程的影响,同时保持问题的易处理性,在网络的输入特征中加入了关于邻近车辆的信息。为了使模型具有较强的鲁棒性和准确性,将意图识别与轨迹预测相结合,得出合理可行的车辆运动轨迹,用于进一步的碰撞概率评估。
[0039]
3、碰撞风险的指标在驾驶辅助或驾驶预警系统中评估风险表现良好,可以对驾驶员进行总体判断,提醒驾驶员注意未来的风险。为了提高评估算法的准确性,建立了车辆风险评估函数,该函数综合了碰撞时间ttc(time to collision)、车头时距th(time headway)、增强碰撞时间ettc(enhanced time to collision),能够更定量、客观的度量多车道场景的风险,更好的起到安全预警的作用。
附图说明
[0040]
为了更清楚地说明本发明实施例中的技术方案,下面将对实施例中所需要使用的附图作简要介绍:
[0041]
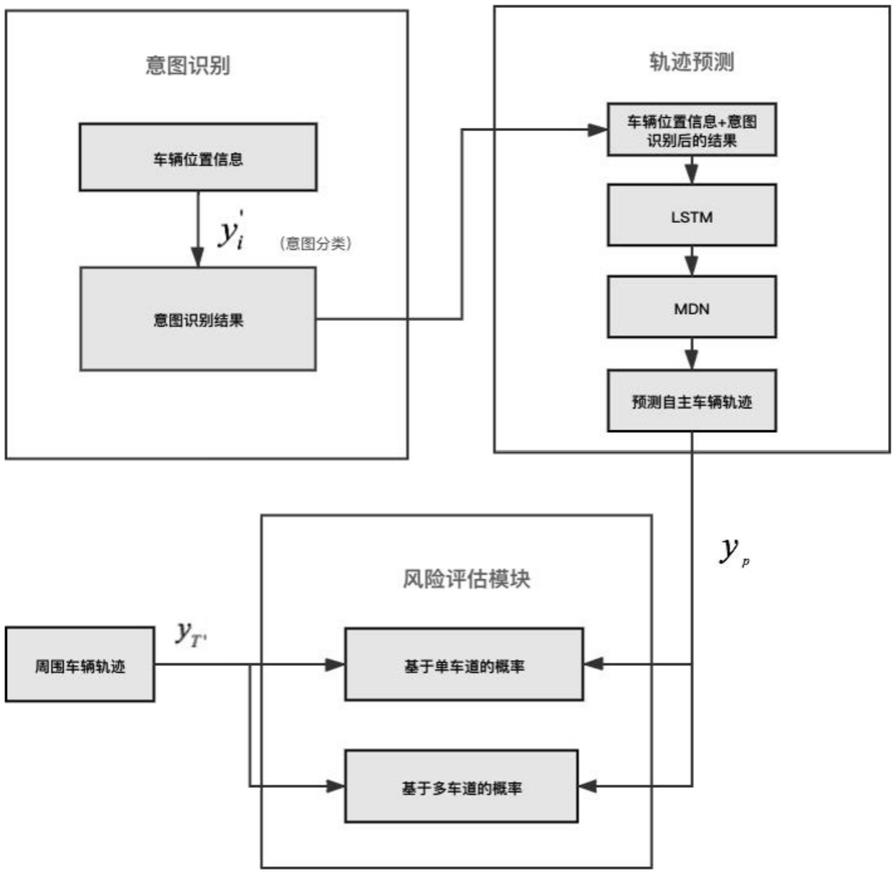
图1是基于它车辆轨迹预测的智能车辆风险评估方法原理图;
[0042]
图2是单车道模型图;
[0043]
图3是多车道模型图。
具体实施方式
[0044]
下面结合附图和具体实施例对本发明作进一步详细的描述:以此为例对本申请做进一步的描述说明。显然,所描述的实施例仅仅是本发明中的一部分实施例,而不是全部实施例。
[0045]
本实施例提供一种基于它车辆轨迹预测的智能车辆风险评估方法,该方法中包括行为预测和风险评估两个模块,其中行为预测模块又包含意图识别和轨迹预测两部分。意图识别模块负责识别驾驶意图,将其分为向左换道、直线行驶、向右换道并提供相应的驾驶行为概率;轨迹预测模块由编码器-解码器结构和混合密度网络层组成,通过历史轨迹信息编码以及意图识别结果来预测未来车辆行驶轨迹。风险评估模块,根据前面行为预测模块得到的轨迹,进一步与周围其他车辆的轨迹相集合,通过风险评估函数来定量和客观地评估每个预测轨迹的程度威胁(反之,也就会获得相对安全的本车行驶规划)。本实施例的风险评估函数考虑了碰撞时间ttc、车头时距th和增强碰撞时间ettc三个重要的时间约束。
[0046]
上述方法具体包括轨迹预测步骤和威胁评估步骤;
[0047]
一、所述轨迹预测步骤采用深度学习算法,利用ngsim数据集训练和评估行为预测模型,实现驾驶意图分类,得到自主车辆的轨迹概率分布;所述行为预测模型包括意图识别模型和轨迹预测模型。意图识别模型负责依据近期车辆行驶数据,识别车辆行驶意图,即利用soft-max激活函数对驾驶意图分类,并得到向左换道、直线行驶、向右换道的概率;轨迹预测模型由编码器-解码器结构和混合密度网络层组成,其中的编码器将历史轨迹信息编码为上下文向量,解码器结合上下文向量和已识别的驾驶意图信息预测未来轨迹。具体实现方式为:
[0048]
s1.构建基于长短时记忆网络结构的车辆行驶意图识别模型;
[0049]
采用长短时记忆网络lstm结构,来处理这种改变车道的意图预测问题,其中车辆自身特征及其邻居特征选择的嵌入维度为64,长短时记忆网络的隐藏维度为128,选择学习率为0:000125,使用soft-max交叉熵损失作为训练损失:
[0050][0051]
其中,y
′
i
是第i个车道改变意图的真实标签,y
′
i
=1表示意图存在,y
′
i
=0表示意图不存在,其中i={1,2,3};y
′
1
是车辆向左换道的意图,y
′
2
是跟随车道的意图,y
′
3
是车辆向右换道的意图,p
j
是换道的正确意图,p
j
=(p
1
,p
2
,p
3
),为意图识别模型输出的意图类别向量,p
1
,p
2
,p
3
分别代表向左换道、直线行驶、向右换道的3种意图类别。
[0052]
s2.对公开数据集ngsim进行数据预处理,获取车辆变道的轨迹数据,用于训练和评估行为预测模型;
[0053]
数据集ngsim记录了美国101号高速公路和80号州际公路(i-80)高速公路上每辆车的位置、速度、加速度和车头时距信息,这两个高速公路都包含45分钟的车辆轨迹数据。从数据集ngsim中提取6个车辆轨迹数据序列,在数据的选取过程中要确保每帧有足够数量
的车辆,对于每个车辆轨迹数据序列的训练集和测试集按照4:1的比例进行分配,获取车辆变道的轨迹数据,包含左变道数据、不变道数据、右变道数据,在采集处理过程中保证这些不同轨迹的数据比例大致相同。
[0054]
s3.通过所述意图识别模型输出车辆行驶意图数据;
[0055]
s4.向轨迹预测模型输入预处理后的车辆行驶数据以及车辆行驶意图数据,得到车辆轨迹概率分布。在轨迹预测模型中的输入分为:主车自身信息和周围车辆信息;主车自身信息包括车辆加速度、车辆相对于道路的转向角、车辆坐标;周围车辆信息包括主车与周围车辆的纵向距离。意图识别的结果是左变道、不变道、右变道的概率,再由行为预测模型获得轨迹概率分布。其中,考虑周围车辆对自主车辆的影响,周围车辆在这里指的是在自主车辆左前方、前方、右前方、左后方、后方、右后方的六辆车,在距离大于500米的情况下,车辆之间的相互作用不予以考虑。具体实现方法为:
[0056]
s4.1采用长短时记忆网络构建轨迹预测模型的编码器和解码器,用于提取车辆行驶数据以及车辆行驶意图数据;
[0057]
在轨迹预测模型的编码器和解码器中,长短时记忆网络循环体都采用和意图识别模型相同的结构,各层之间的学习率为0.001,每个隐藏层单元为128。
[0058]
s4.2使用混合密度网络作为行为预测模型的输出层来预测输出的车辆轨迹概率分布:
[0059]
p(t|m)=∑p
π,μ,σ
(t
j
|p
j
,m)p(p
j
|m)
[0060]
其中:t为意图识别模型输出,m为模型的输入量,p
π,μ,σ
(t
j
|p
j
,m)是解码器经过行为预测模型处理后输出的轨迹预测信息,p
j
是正确的换道意图;π为分配系数,μ为均值,σ为标准差。
[0061]
二、所述威胁评估步骤通过车辆风险评估函数来定量、客观地评估每个状态下的威胁,所述车辆风险评估函数包括碰撞时间ttc、车头时距th和增强碰撞时间ettc。定义车辆风险评估函数,输入自主车辆与周围车辆的行驶轨迹,获得当前风险系数,具体为:
[0062]
s21.获得自主车辆以及周围车辆的行驶轨迹,根据行为预测模型得到自主车辆的行驶轨迹如下所示:
[0063]
p(t|m)=∑p
π,μ,σ
(t
j
|p
j
,m)p(p
j
|m)
[0064]
其中:t为意图识别模型输出,m为模型的输入量,p
π,μ,σ
(t
j
|p
j
,m)是解码器经过行为预测模型处理后输出的轨迹预测信息,p
j
是正确的换道意图;π为分配系数,μ为均值,σ为标准差;周围车辆的行驶轨迹如下所示:
[0065][0066]
式中,以汽车所在位置为坐标原点,速度方向为x轴建立坐标系,l为换道过程的纵向位移,w为横向位移;
[0067]
s22.通过碰撞时间ttc和车头时距th的指标进行单车道风险评估;
[0068]
单行道威胁评估功能主要用于车辆的跟驰场景,碰撞时间ttc和车头时距th是评估风险的两个主要指标。但使用ttc或th只能反映风险趋势,不能很好地衡量未来的风险。因此将两者结合起来进行单车道风险评估,安全距离模型如图2所示。
[0069]
s23.通过碰撞时间ttc和增强碰撞时间ettc进行多车道风险评估,针对旁车道车
辆换道并线的工况,采用估算旁车道车辆进入自主车辆行驶区域时间的方式进行危险评估。
[0070]
针对于主车与同车道前方车辆,以前研究人员使用ttc来测量碰撞风险,然而在相同的碰撞时间ttc(time to collision)值下,客观风险可能会有所不同,在处理多车道场景时,差异会非常显著。本实施例采用基于碰撞时间ttc和增强碰撞时间ettc模型相结合评估模式以反应碰撞危险。针对旁车道车辆换道并线的工况,采用了估算旁车道车辆进入自主车辆行驶区域时间的方式进行危险评估,如图3所示。
[0071]
现有技术通常是根据自主车辆的驾驶意图预测轨迹来进行风险评估,而本发明考虑了自主车辆与其他车辆之间的相互作用、相互影响。在考虑交互信息之后,可以使得模型做出更加准确的风险评估,避免总是做出过于保守的预测。
[0072]
本发明将车辆的轨迹预测与风险评估结合起来考量,建立完整的模型结构,保证了在获得自主车辆的轨迹之后能够评估出其与其他车辆之间的轨迹是否冲突,进而来确定自主车辆是否危险。
[0073]
为了克服现有技术只使用单一的的风险指标来评估路况中的风险时刻,建立了综合车辆风险评估函数,定量客观地评价每个状态下的风险,综合了已有的碰撞时间ttc、车头时距th和增强碰撞时间ettc模型。
[0074]
以上所述,仅为本发明创造较佳的具体实施方式,但本发明创造的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明创造披露的技术范围内,根据本发明创造的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明创造的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1