道路形状推定装置、道路形状推定方法和道路形状推定程序与流程
1.本公开涉及用于推定道路形状的道路形状推定装置、道路形状推定方法和道路形状推定程序。
背景技术:
2.在以下的专利文献1中公开了具备物体检测单元和推定单元的道路形状推定装置。该物体检测单元重复检测存在于道路左端附近的物体中的电波的反射点(以下称为“左侧反射点”)或存在于道路右端附近的物体中的电波的反射点(以下称为“右侧反射点”)中的任意一方。该推定单元基于包括由物体检测单元检测到的多个左侧反射点在内的点串的形状或包括由物体检测单元检测到的多个右侧反射点在内的点串的形状中的任意一方来推定道路的形状。现有技术文献专利文献
3.专利文献1:日本专利特开2010-107447号公报
技术实现要素:
发明所要解决的技术问题
4.在专利文献1所公开的道路形状推定装置中,由于由物体检测单元检测到的左侧反射点的数量或由物体检测单元检测到的右侧反射点的数量较少,因此存在推定单元有时无法推定道路的形状的问题。如果没有检测到3个以上的左侧反射点或右侧反射点中的任意一方,则无法推定弯曲的道路的形状。
5.本公开是为了完成上述问题而完成的,其目的在于获得即使在左侧反射点的数量或右侧反射点的数量较少的情况下也能够推定道路的形状的道路形状推定装置、道路形状推定方法和道路形状推定程序。用于解决技术问题的技术手段
6.本公开所涉及的道路形状推定装置包括:根据由存在于车辆周边的物体反射的多个电波的接收信号,检测表示物体中各个电波的反射位置的反射点的反射点检测部;在由反射点检测部检测到的多个反射点中、将存在于车辆的行进方向左侧的区域的物体的反射点分类为第1组,将存在于车辆的行进方向右侧的区域的物体的反射点分类为第2组的反射点分类部;使由反射点分类部分类为第1组的各个反射点向与车辆的行进方向正交的车辆的右侧方向平行移动,将由反射点分类部分类为第2组的各个反射点向与车辆的行进方向正交的车辆的左侧方向平行移动的平行移动部;以及计算表示包含由平行移动部进行平行移动后的所有反射点的点串的近似曲线,并根据近似曲线推定车辆行驶的道路的形状的道路形状推定部。
发明效果
7.根据本公开,即使在左侧反射点的数量或右侧反射点的数量较少的情况下也能够推定道路的形状。
附图说明
8.图1是表示实施方式1所涉及的道路形状推定装置10的结构图。图2是表示实施方式1所涉及的道路形状推定装置10的硬件的硬件结构图。图3是道路形状推定装置10由软件或固件等实现时的计算机的硬件结构图。图4是表示实施方式1所涉及的道路形状推定装置10的处理步骤即道路形状推定方法的流程图。图5是表示物体的方位的说明图。图6是表示存在于车辆行进方向左侧的区域中的物体53和存在于车辆行进方向右侧的区域中的物体54的说明图。图7是表示多个分割区域的说明图。图8是表示包括反射点refm的多个分割区域被分类为六个组(g1)至(g6)的示例的说明图。图9是表示反射点refi和反射点refj、以及第1近似曲线y1(x)和第2近似曲线y2(x)的说明图。图10是表示平行移动后的反射点refi及平行移动后的反射点refj、以及表示包含平行移动后的所有反射点refi、refj的点串的近似曲线的说明图。图11是表示第3近似曲线y3(x)及第4近似曲线y4(x)的说明图。图12是用于说明判定物体是否存在于道路内的处理的说明图。图13是表示原始反射点refi、refj以及假想反射点refi、refj的说明图。图14是示出表示包含由平行移动部19平行移动后的所有反射点refi、refj的点串的近似曲线y
trans
(x)的说明图。图15是表示分别包含于第1组和第2组的分割区域以及第1近似曲线y1(x)和第2近似曲线y2(x)的说明图。图16是示出包含平行移动后的反射点refu、refv的分割区域和表示包含平行移动后的所有反射点refu、refv的点串的近似曲线的说明图。图17是表示第3近似曲线y3(x)及第4近似曲线y4(x)的说明图。图18是表示反射点refi和反射点refj、以及第1近似曲线y1(x)和第2近似曲线y2(x)的说明图。图19是表示平行移动后的反射点refi及平行移动后的反射点refj、以及表示包含平行移动后的所有反射点refi、refj的点串的近似曲线的说明图。图20是表示第3近似曲线y3(x)及第4近似曲线y4(x)的说明图。图21是表示实施方式3所涉及的道路形状推定装置10的结构图。图22是表示实施方式3所涉及的道路形状推定装置10的硬件的硬件结构图。
具体实施方式
9.以下,为了对本公开进行更加详细的说明,根据附图对用于实施本公开的方式进行说明。
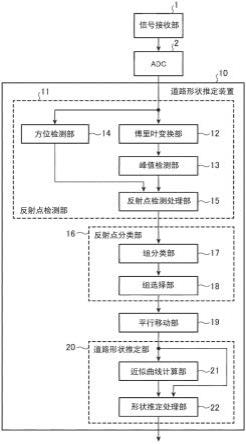
10.实施方式1图1是表示实施方式1所涉及的道路形状推定装置10的结构图。图2是表示实施方式1所涉及的道路形状推定装置10的硬件的硬件结构图。图1中,信号接收部1例如包括在车辆所设置的雷达装置中。雷达装置例如包括发送机、发送天线、接收天线和信号接收部1。信号接收部1分别接收由存在于车辆周边的物体反射的多个电波。信号接收部1将各个电波的接收信号输出到adc(模拟数字转换器)2。adc 2将从信号接收部1输出的各个接收信号从模拟信号转换为数字信号,并将各个数字信号输出到道路形状推定装置10。
11.道路形状推定装置10包括反射点检测部11、反射点分类部16、平行移动部19和道路形状推定部20。反射点检测部11例如由图2所示的反射点检测电路31实现。反射点检测部11包括傅里叶变换部12、峰值检测部13、方位检测部14和反射点检测处理部15。反射点检测部11根据从adc 2输出的各个数字信号,检测表示物体中各个电波的反射位置的反射点。反射点检测部11将检测到的各个反射点输出到反射点分类部16。
12.傅里叶变换部12通过在量程方向和命中方向上对从adc2输出的各个数字信号进行傅里叶变换,生成横轴为频率f、纵轴为量程r的fr图。fr图表示多个数字信号中各自的傅里叶变换结果,表示设置有信号接收部1的车辆与物体之间的相对距离、车辆与物体之间的相对速度和信号强度电平。峰值检测部13例如通过执行cfar(constant false alarm rate:恒定虚警率)处理,在fr图中所示的多个信号强度电平中检测大于阈值的信号强度电平。阈值是例如将噪声或地面杂波误检测为车辆周边存在的物体的误警报概率作为基准的值。峰值检测部13在fr图中检测表示大于阈值的信号强度电平的位置的峰值位置。峰值位置处的信号强度电平表示反射点的信号强度电平。峰值检测部13将检测到的各个峰值位置输出到反射点检测处理部15。
13.方位检测部14使用music(multiple signal classification:多重信号分类)方法或esprit(estimation of signal parameters via rotational invariance techniques:基于旋转不变性技术的信号参数推定)方法等到来方向推定方法,根据从adc 2输出的各个数字信号检测各个物体的方位。反射点检测处理部15根据由傅里叶变换部12生成的fr图,获取与由峰值检测部13检测到的各个峰值位置相关的相对距离。反射点检测处理部15根据与各个峰值位置相关的相对距离和由方位检测部14检测到的各个物体的方位来检测各个反射点。反射点检测处理部15将检测到的各个反射点输出到组分类部17。
14.反射点分类部16例如由图2所示的反射点分类电路32实现。反射点分类部16包括组分类部17和组选择部18。反射点分类部16将在由反射点检测部11检测到的各个反射点中存在于车辆行进方向左侧的区域的物体的反射点分类为第1组。反射点分类部16将在由反射点检测部11检测到的各个反射点中存在于车辆行进方向右侧的区域的物体的反射点分类为第2组。
15.图1所示的道路形状推定装置10中,车辆周边的区域被划分为多个分割区域。组分类部17确定包含有由反射点检测处理部15检测到的各个反射点的分割区域。组分类部17在所确定的多个分割区域中,确定包括与包含有反射点的其他分割区域接触的分割区域的集合的组、以及仅包括不与包含有反射点的其他分割区域接触的一个分割区域的组。组分类部17将所确定的各个组分类为存在于车辆行进方向左侧的区域的左组或存在于车辆行进方向右侧的区域的右组。组选择部18从被组分类部17分类为左组的一个以上的组中选择所包含的分割区域的数量最多的组作为第1组。组选择部18从被组分类部17分类为右组的一个以上的组中选择所包含的分割区域的数量最多的组作为第2组。
16.平行移动部19例如通过图2所示的平行移动电路33来实现。平行移动部19使被反射点分类部16分类为第1组的各个反射点在与车辆的行进方向正交的车辆的右侧方向上平行移动。即,平行移动部19计算表示包含被反射点分类部16分类为第1组的所有反射点的点串的第1近似曲线,并且将分类为第1组的各个反射点向车辆的右侧方向平行移动第1近似曲线中的常数项的值。若设为车辆行驶的道路面是平面,则车辆的右侧方向是与该平面大致平行的方向。此外,平行移动部19使被反射点分类部16分类为第2组的各个反射点在与车辆的行进方向正交的车辆的左侧方向上平行移动。即,平行移动部19计算表示包含被反射点分类部16分类为第2组的所有反射点的点串的第2近似曲线,并且将分类为第2组的各个反射点向车辆的左侧方向平行移动第2近似曲线中的常数项的值。车辆的左侧方向是与该平面大致平行的方向。这里的正交并不局限于与车辆的行进方向严格正交的情况,而是在实用上没有问题的范围内也包含偏离正交的情况的概念。另外,这里的平行移动并不局限于严格的平行移动,而是在实用上没有问题的范围内也包含大致平行的移动的概念。
17.道路形状推定部20例如由图2所示的道路形状推定电路34实现。道路形状推定部20包括近似曲线计算部21和形状推定处理部22。道路形状推定部20计算表示包含由平行移动部19进行平行移动后的所有反射点的点串的近似曲线,并根据近似曲线推定车辆行驶的道路的形状。
道路形状推定部20将道路形状的推定结果输出到例如安装在车辆上的导航装置或车辆的控制装置。
18.近似曲线计算部21计算表示包含由平行移动部19进行平行移动后的所有反射点的点串的近似曲线。形状推定处理部22计算由近似曲线计算部21计算出的近似曲线的曲率和由平行移动部19计算出的第1近似曲线中的常数项所表示的第3近似曲线。形状推定处理部22计算由近似曲线计算部21计算出的近似曲线的曲率和由平行移动部19计算出的第2近似曲线中的常数项所表示的第4近似曲线。形状推定处理部22根据第3近似曲线和第4近似曲线推定车辆行驶的道路的形状。
19.图1中,假设作为道路形状推定装置10的构成要素的反射点检测部11、反射点分类部16、平行移动部19和道路形状推定部20分别由图2所示的专用硬件实现。即,假设道路形状推定装置10由反射点检测电路31、反射点分类电路32、平行移动电路33和道路形状推定电路34实现。反射点检测电路31、反射点分类电路32、平行移动电路33和道路形状推定电路34例如是单一电路、复合电路、程序化处理器、串联程序化处理器、asic(application specific integrated circuit:专用集成电路)、fpga(field-programmable gatearray:现场可编程门阵列)、或它们的组合。
20.道路形状推定装置10的构成要素不限于由专用硬件实现,道路形状推定装置10可以由软件、固件或软件与固件的组合来实现。软件或固件作为程序存储在计算机的存储器中。计算机意味着执行程序的硬件,例如有cpu(central processing unit:中央处理器)、中央处理装置、处理装置、运算装置、微处理器、微计算机、处理器或dsp(digital signal processor:数字信号处理器)。
21.图3是道路形状推定装置10由软件或固件等实现时的计算机的硬件结构图。当道路形状推定装置10由软件或固件等实现时,用于使计算机执行反射点检测部11、反射点分类部16、平行移动部19和道路形状推定部20中的各个处理步骤的道路形状推定程序存储在存储器41中。然后,计算机的处理器42执行存储在存储器41中的道路形状推定程序。
22.此外,图2示出了道路形状推定装置10的各个构成要素由专用硬件实现的示例,图3示出了道路形状推定装置10由软件或固件等实现的示例。然而,这只是一个示例,道路形状推定装置10中的一部分构成要素可以通过专用硬件来实现,剩余构成要素可以通过软件或固件等来实现。
23.接着,对图1所示的道路形状推定装置10的动作进行说明。从设置在车辆上的未图示的雷达装置的发送天线发射电波。从发送天线发射的电波被车辆周边存在的物体反射。作为车辆周边存在的物体,可考虑有护栏、建筑物外墙、路标、立柱或行道树等。信号接收部1分别接收由存在于车辆周边的物体反射的多个电波。图1所示的道路形状推定装置10中,设为信号接收部1接收m个电波。m是3以上的整数。关于m个电波,除了是被相互不同的物体反射的电波的情况外,也有被1个物体的相互不同的部位反射的电波的情况。
信号接收部1将m个电波的接收信号rm输出到adc2。m=1,2,...,m。adc 2从信号接收部1接收到各个接收信号rm后,将各个接收信号rm从模拟信号转换为数字信号dm,并将各个数字信号dm输出到道路形状推定装置10。
24.图4是表示实施方式1所涉及的道路形状推定装置10的处理步骤即道路形状推定方法的流程图。反射点检测部11在从adc 2接收到各个数字信号dm时,根据各个数字信号dm检测表示物体上各个电波的反射位置的反射点refm(图4中的步骤st1)。反射点检测部11将检测到的各个反射点refm输出到反射点分类部16。在下文中,将具体描述反射点检测部11的反射点refm的检测处理。
25.傅里叶变换部12在从adc2接收到各个数字信号dm后,在量程方向和命中方向上对各个数字信号dm进行傅里叶变换,从而生成fr图。fr图示出数字信号d1至dm中各自的傅里叶变换结果。峰值检测部13例如通过执行cfar处理,在fr图中所示的多个信号强度电平中检测大于阈值th的信号强度电平lm。接着,峰值检测部13在fr图中检测表示大于阈值th的信号强度电平lm的位置的峰值位置pm。峰值位置pm处的信号强度电平lm表示反射点refm的信号强度电平。峰值检测部13将检测到的各个峰值位置pm输出到反射点检测处理部15。
26.方位检测部14在从adc 2接收到各个数字信号dm时,使用music方法或esprit方法等到来方向推定方法,根据各个数字信号dm检测各个物体的方位azm。即,方位检测部14通过使用各个数字信号dm的相关矩阵和固有向量来求出相关矩阵的固有值,并且根据大于热噪声功率的固有值的数量来推定来自物体的反射波的数量,从而检测物体的方位azm。方位检测部14将各个物体的方位azm输出到反射点检测处理部15。
27.图5是表示物体的方位的说明图。图5中,51是车辆,52是物体。x轴表示与车辆51的行进方向平行的方向,y轴表示与车辆51的行进方向正交的方向。θ是车辆51的行进方向与从车辆51观察物体52的方向之间所成的角。若车辆51的行进方向的绝对方位是α,则θ+α是物体的相对方位。r是车辆与物体之间的相对距离。rsinθ是例如从道路的中线到物体的距离,如果rsinθ比道路宽度的二分之一要长,则可知存在于道路的外侧。如果rsinθ在道路宽度的二分之一以下,则可知存在于道路内。
28.反射点检测处理部15根据由傅里叶变换部12生成的fr图,获取与由峰值检测部13检测到的各个峰值位置pm相关的相对距离rdm。反射点检测处理部15根据与各个峰值位置pm相关的相对距离rdm和由方位检测部14检测到的各个物体的方位azm来检测各个反射点refm。由于车辆的当前位置是已知值,所以根据相对距离rdm和方位azm,可以检测出反射点refm。反射点检测处理部15将检测到的各个反射点refm输出到组分类部17。
29.反射点分类部16将在由反射点检测部11检测到的m个反射点refm中存在于车辆行
进方向左侧的区域的物体的反射点分类为第1组(图4的步骤st2)。反射点分类部16将在由反射点检测部11检测到的m个反射点refm中存在于车辆行进方向右侧的区域的物体的反射点分类为第2组(图4的步骤st3)。图6是表示存在于车辆行进方向左侧的区域中的物体53和存在于车辆行进方向右侧的区域中的物体54的说明图。物体53的任意反射位置处的反射点refm被分类为与物体53相关的第1组,并且物体54的任意反射位置处的反射点refm被分类为与物体54相关的第2组。在下文中,将具体描述反射点分类部16的反射点refm的分类处理。
30.图1所示的道路形状推定装置10中,如图7所示,车辆周边的区域被划分为多个分割区域。图7是表示多个分割区域的说明图。图7的原点表示车辆的位置。x轴表示与车辆的行进方向平行的方向,y轴表示与车辆的行进方向正交的方向。图7中,车辆周边的领域被划分为(6
×
6)个分割领域。然而,这只是一个示例,可以被划分为比(6
×
6)个更多的分割区域,也可以被划分为比(6
×
6)个更少的分割区域。另外,在图7中,分割领域的形状为四边形。然而,这只是一个示例,分割区域的形状可以是例如三角形。另外,分割区域的坐标系可以是任何坐标系,例如可以是直线正交坐标系,也可以是曲线正交坐标系。图7中,〇表示由反射点检测部11检测到的反射点refm。
31.组分类部17确定包含有由反射点检测处理部15检测到的各个反射点refm的分割区域。组分类部17中,表示各个分割区域的位置的坐标是已知值。图7的示例中,坐标(6,-3)的分割区域、坐标(5,-1)的分割区域、坐标(4,-2)的分割区域、坐标(3,-2)的分割区域以及坐标(2,-3)的分割区域中包含反射点refm。另外,坐标(5,3)的分割区域、坐标(4,2)的分割区域、坐标(3,2)的分割区域以及坐标(2,1)的分割区域中包含反射点refm。
32.组分类部17进行将在包含反射点refm的多个分割区域中、与包含反射点的其他分割区域接触的分割区域的集合包括在一个组中的处理。图7的示例中,坐标(5,-1)的分割区域、坐标(4,-2)的分割区域、坐标(3,-2)的分割区域以及坐标(2,-3)的分割区域被包括在一个组(g1)中。此外,图7的示例中,坐标(5,3)的分割区域、坐标(4,2)的分割区域、坐标(3,2)的分割区域和坐标(1,2)的分割区域被包括在一个组(g2)中。当物体为护栏那样的道路结构物时,大多横跨多个分割区域设置。因此,当电波被护栏那样的道路结构物反射时,包含在一个组中的分割领域的数量大多为2以上。
33.组分类部17进行将在包含反射点refm的多个分割区域中、与包含反射点的其他分割区域不接触的分割区域包括在一个组中的处理。图7的示例中,坐标(6,-3)的分割区域包括在一个组(g3)中。例如,如果是立柱这样的物体,则大多设置在一个分割区域内。因此,当电波被立柱那样的物体反射时,包含在一个组中的分割领域的数量大多为1。
34.组分类部17将组(g1)、组(g2)和组(g3)分别分类为存在于车辆行进方向左侧的区域的左组或存在于车辆行进方向右侧的区域的右组。图7的示例中,由于组(g1)和组(g3)存在于车辆行进方向左侧的区域中,因此组(g1)和组(g3)被分类为左组。即,组(g1)中包含的所有分割区域的y坐标的符号是
“‑”
,因此组(g1)被分类为左组。同样地,组(g3)中包含的分割区域的y坐标的符号是
“‑”
,因此组(g3)被分类为左组。此外,由于组(g2)存在于车辆行进方向右侧的领域,所以组(g2)被分类为右组。即,组(g2)中包含的所有分割区域的y坐标的符号是“+”,因此组(g2)被分类为右组。
35.图7中,例如,组(g1)中包含的所有分割区域的y坐标的符号为
“‑”
。但是也存在下述情况,即:组(g1)所包含的一部分分割区域的y坐标的符号为
“‑”
,剩余分割区域的y坐标的符号为“+”。这种情况下,组分类部17例如着眼于组(g1)所包含的多个分割区域中、x坐标最小的分割区域。接着,组分类部17可以在x坐标最小的分割区域的y坐标的符号是
“‑”
时,将组(g1)分类为左组,在y坐标的符号是“+”时,将组(g1)分类为右组。但是,该分类只是一个示例,例如,如果存在于车辆的行进方向左侧的区域中的分割区域的数量在存在于车辆的行进方向右侧的区域中的分割区域的数量以上,则组分类部17将组(g1)分类为左组。如果存在于车辆的行进方向左侧的区域中的分割区域的数量比存在于车辆的行进方向右侧的区域中的分割区域的数量少,则组分类部17可以将组(g1)分类为右组。
36.组选择部18从被组分类部17分类为左组的一个以上的组中选择所包含的分割区域的数量最多的组作为第1组。由于所包含的分割区域的数量多的组比所包含的分割区域的数量少的组有较高可能是表示道路形状的道路结构物,因此,利用组选择部18选择所包含的分割区域的数量最多的组。图7的示例中,组(g1)和组(g3)被分类为左组。然后,由于组(g1)中包含的分割区域的数量是4,组(g3)中包含的分割区域的数量是1,所以组(g1)被选择为第1组。组选择部18从被组分类部17分类为右组的一个以上的组中选择所包含的分割区域的数量最多的组作为第2组。图7的示例中,由于只有组(g2)被分类为右组,所以组(g2)被选择为第2组。
37.图7的示例中,组(g1)所包含的分割区域的数量大于组(g3)所包含的分割区域的数量。但是,有时组(g1)所包含的分割区域的数量与组(g3)所包含的分割区域的数量相同。在这种情况下,组选择部18例如如下述那样选择组(g1)或组(g3)作为第1组。组选择部18在组(g1)所包含的多个分割区域中确定最接近车辆的分割区域,并计算该分割区域和车辆之间的距离l1。组选择部18在组(g3)所包含的多个分割区域中确定最接近车辆的分割区域,并计算该分割区域和车辆之间的距离l3。当距离l1在距离l3以下时,组选择部18选择组(g1)作为第1组,并且当距离l1大于距离l3时,组选择部18选择组(g3)作为第1组。
38.图8是表示包括反射点refm的多个分割区域被分类为六个组(g1)至(g6)的示例的说明图。图8所示的分类例与图7所示的分类例不同。在图8的示例中,利用组分类部17,组(g1)和组(g2)被分类为左组,组(g3)至组
(g6)被分类为右组。组(g3)所包含的一部分分割区域存在于车辆行进方向左侧的区域,剩余的分割区域存在于车辆行进方向右侧的区域。在组(g3)所包含的多个分割区域中,由于x坐标最小的分割区域的y坐标的符号为“+”,因此组(g3)被分类为右组。在图8的示例中,通过组选择部18,组(g1)被选择为第1组,组(g4)被选择为第2组。
39.如图9所示,平行移动部19从反射点分类部16获取被分类为第1组的所有反射点refi。i=1,...,i,i是1以上的整数。如图9所示,平行移动部19从反射点分类部16获取被分类为第2组的所有反射点refj。j=1,...,j,j是1以上的整数。i+j=m。图9是表示反射点refi和反射点refj、以及第1近似曲线y1(x)和第2近似曲线y2(x)的说明图。在图9的示例中,平行移动部19获取四个反射点refi,并获取三个反射点refj。
40.平行移动部19例如使用最小2乘法,如下述式(1)所示那样来计算第1近似曲线y1(x),该第1近似曲线y1(x)表示包括被分类为第1组的所有反射点refi的点串。y1(x)=a1x2+b1x+c1ꢀꢀ
(1)式(1)中,a1为2次系数,b1为1次系数,c1为常数项。这里,由于平行移动部19获取了三个以上的反射点refi,因此计算出式(1)所示的第1近似曲线y1(x)。在被分类为第1组的反射点refi的个数为2个时,由于无法计算2次曲线,所以计算出下式(2)所示的第1近似曲线y1(x)。y1(x)=d1x+e1ꢀꢀ
(2)式(2)中,d1为1次系数,e1为常数项。此外,在被分类为第1组的反射点refi的个数为1个时,计算出下式(3)所示的第1近似曲线y1(x)。y1(x)=g1ꢀꢀ
(3)在式(3)中,g1是常数项,是反射点refi处y坐标的值。
41.平行移动部19例如使用最小2乘法,如下述式(4)所示那样来计算第2近似曲线y2(x),该第2近似曲线y2(x)表示包括被分类为第2组的所有反射点refi的点串。y2(x)=a2x2+b2x+c2ꢀꢀ
(4)式(4)中,a2为2次系数,b2为1次系数,c2为常数项。这里,由于平行移动部19获取了三个以上的反射点refj,因此计算出式(4)所示的第2近似曲线y2(x)。在被分类为第2组的反射点refj的个数为2个时,由于无法计算2次曲线,所以计算出下式(5)所示的第2近似曲线y2(x)。y2(x)=d2x+e2ꢀꢀ
(5)式(5)中,d2为1次系数,e2为常数项。此外,在被分类为第2组的反射点refj的个数为1个时,计算出下式(6)所示的第2近似曲线y2(x)。y2(x)=g2ꢀꢀ
(6)在式(6)中,g2是常数项,是反射点refj处y坐标的值。
42.若计算出式(1)所示的第1近似曲线y1(x),则平行移动部19如图9所示,使被分类
为第1组的各个反射点refi向车辆的右侧方向(+y方向)平行移动第1近似曲线y1(x)中的常数项c1的值(图4的步骤st4)。若计算出式(2)所示的第1近似曲线y1(x),则平行移动部19使被分类为第1组的各个反射点refi向车辆的右侧方向(+y方向)平行移动第1近似曲线y1(x)中的常数项e1的值。若计算出式(3)所示的第1近似曲线y1(x),则平行移动部19使被分类为第1组的反射点refi向车辆的右侧方向(+y方向)平行移动第1近似曲线y1(x)中的常数项g1的值。
43.若计算出式(4)所示的第2近似曲线y2(x),则平行移动部19如图9所示,使被分类为第2组的各个反射点refj向车辆的左侧方向(-y方向)平行移动第2近似曲线y2(x)中的常数项c2的值(图4的步骤st5)。若计算出式(5)所示的第2近似曲线y2(x),则平行移动部19使被分类为第2组的反射点refj向车辆的左侧方向(-y方向)平行移动第2近似曲线y2(x)中的常数项e2的值。若计算出式(6)所示的第2近似曲线y2(x),则平行移动部19使被分类为第2组的反射点refj向车辆的左侧方向(-y方向)平行移动第2近似曲线y2(x)中的常数项g2的值。
44.若各个反射点refi向+y方向平行移动常数项c1的值,各个反射点refj向-y方向平行移动常数项c2的值,则如图10所示,平行移动后的各个反射点refi以及平行移动后的各个反射点refj大致位于1条近似曲线上。大体上,位于1条近似曲线上的反射点的数量为m(=i+j)个。图10是表示平行移动后的反射点refi及平行移动后的反射点refj、以及表示包含平行移动后的所有反射点refi、refj的点串的近似曲线的说明图。
45.另外,在第1近似曲线y1(x)是式(1)所示的近似曲线,第2近似曲线y2(x)是式(5)所示的近似曲线或者式(6)所示的近似曲线时,平行移动后的各个反射点refj有时不位于表示包含平行移动后的所有反射点refi的点串的近似曲线上。但是,平行移动后的各个反射点refj位于该近似曲线的附近。另外,在第2近似曲线y2(x)是式(4)所示的近似曲线,第1近似曲线y1(x)是式(2)所示的近似曲线或者式(3)所示的近似曲线时,平行移动后的各个反射点refi有时不位于表示包含平行移动后的所有反射点refj的点串的近似曲线上。但是,平行移动后的各个反射点refi位于该近似曲线的附近。
46.道路形状推定部20计算表示包含由平行移动部19进行平行移动后的所有反射点refi、refj的点串的近似曲线y
trans
(x),并根据近似曲线y
trans
(x)推定车辆行驶的道路的形状。以下,对道路形状推定单元20的道路形状的推定处理进行具体说明。
47.近似曲线计算部21例如使用最小2乘法,如下式(7)所示那样,计算近似曲线y
trans
(x),该近似曲线y
trans
(x)表示包含平行移动后的所有反射点refi、refj的点串(图4的步骤st6)。y
trans
(x)=a3x2+b3x+c3ꢀꢀ
(7)式(7)中,a3为2次系数,b3为1次系数,c3为常数项。平行移动后的反射点refi、refj的数量为m(=i+j)个,比反射点refi的数量多,并且比反射点refj的数量多。因此,即使反射点refi的数量、或者反射点refj的数量中的任意一个不满足3个时,平行移动后的反射点refi、refj的数量也成为3个以上,能够计算出近似
曲线y
trans
(x)。
48.形状推定处理部22如下式(8)所示,计算表示由近似曲线计算部21计算出的近似曲线y
trans
(x)中的曲率的2次系数a3和由平行移动部19计算出的第1近似曲线y1(x)中的1次系数b1以及常数项c1所表示的第3近似曲线y3(x)。y3(x)=a3x2+b1x+c1ꢀꢀ
(8)
49.此外,形状推定处理部22如下式(9)所示,计算表示近似曲线y
trans
(x)中的曲率的2次系数a3和由平行移动部19计算出的第2近似曲线y2(x)中的1次系数b2以及常数项c2表示的第4近似曲线y4(x)。y4(x)=a3x2+b2x+c2ꢀꢀ
(9)图11是表示第3近似曲线y3(x)及第4近似曲线y4(x)的说明图。
50.形状推定处理部22根据第3近似曲线y3(x)和第4近似曲线y4(x)推定车辆行驶的道路的形状(图4的步骤st7)。即,形状推定处理部22将第3近似曲线y3(x)表示的曲线形状推定为是道路左端的形状,并且将第4近似曲线y4(x)表示的曲线形状推定为是道路右端的形状。形状推定处理部22将道路形状的推定结果输出到例如车辆的未图示的控制装置。车辆的控制装置例如在将车辆自动驾驶时,可以使用道路形状的推定结果来控制车辆的转向。
51.形状推定处理部22可以在推定道路的形状之后,判定未被组选择部18选择的组(g2)、组(g3)、组(g5)和组(g6)中的每一个是否存在于第3近似曲线y3(x)所示的曲线形状与第4近似曲线y4(x)所示的曲线形状之间。在形状推定处理部22中,组(g2)、组(g3)、组(g5)和组(g6)中的坐标是已知值。由此,形状推定处理部22可以判定组(g2)、组(g3)、组(g5)和组(g6)中的每一个是否存在于第3近似曲线y3(x)所示的曲线形状与第4近似曲线y4(x)所示的曲线形状之间。图12是用于说明判定物体是否存在于道路内的处理的说明图。图12的示例中,判定与组(g2)相关的物体不存在于第3近似曲线y3(x)所示的曲线形状与第4近似曲线y4(x)所示的曲线形状之间。即,与组(g2)相关的物体被判定为存在于道路外侧。分别与组(g5)和组(g6)相关的物体被判定为不存在于第3近似曲线y3(x)所示的曲线形状与第4近似曲线y4(x)所示的曲线形状之间。即,分别与组(g5)和组(g6)相关的物体被判定为存在于道路内。判定为与组(g3)相关的物体的一部分存在于第3近似曲线y3(x)所示的曲线形状与第4近似曲线y4(x)所示的曲线形状之间,与组(g3)相关的物体的一部分不存在于第3近似曲线y3(x)所示的曲线形状与第4近似曲线y4(x)所示的曲线形状之间。即,与组(g3)相关的物体被判定为一部分存在于道路内。
52.在上述实施方式1中,道路形状推定装置10构成为包括:根据由存在于车辆周边的物体反射的多个电波的接收信号,检测表示物体中各个电波的反射位置的反射点的反射点检测部11;在由反射点检测部11检测到的多个反射点中、将存在于车辆行进方向左侧的区域的物体的反射点分类为第1组,将存在于车辆行进方向右侧的区域的物体的反射点分类为第2组的反射点分类部16;使由反射点分类部16分类为第1组的各个反射点向与车辆的行
进方向正交的车辆的右侧方向平行移动,将由反射点分类部16分类为第2组的各个反射点向与车辆的行进方向正交的车辆的左侧方向平行移动的平行移动部19;以及计算表示包含由平行移动部19进行平行移动后的所有反射点的点串的近似曲线,并根据近似曲线推定车辆行驶的道路的形状的道路形状推定部20。因此,道路形状推定装置10即使在左侧反射点的数量或右侧反射点的数量较少的情况下也能够推定道路的形状。
53.在图1所示的道路形状推定装置10中,平行移动部19如图9所示,计算表示包含被分类为第1组的所有反射点refi的点串的第1近似曲线y1(x),计算表示包含被分类为第2组的所有反射点refj的点串的第2近似曲线y2(x)。然而,这只是一个示例,如图13所示,平行移动部19可以将y轴作为对称轴,通过将被分类为第1组的所有反射点refi复制到x坐标为负的区域来生成假想反射点refi。此外,如图13所示,平行移动部19可以将y轴作为对称轴,通过将被分类为第2组的所有反射点refj复制到x坐标为负的区域来生成假想反射点refj。通过生成假想反射点refi,反射点refi的数量成为2倍,通过生成假想反射点refj,反射点refj的数量成为2倍。图13是表示原始反射点refi、refj和假想反射点refi、refj的说明图。在图13中,〇是原始反射点refi、refj,
△
是假想反射点refi、refj。假想反射点refi的y坐标与原始反射点refi的y坐标相同,假想反射点refi的x坐标是原始反射点refi的x坐标乘以
“‑
1”得到的值。此外,假想反射点refj的y坐标与原始反射点refj的y坐标相同,假想反射点refj的x坐标是原始反射点refj的x坐标乘以
“‑
1”得到的值。
54.如式(1)所示,平行移动部19计算第1近似曲线y1(x),该第1近似曲线y1(x)表示包括所有原始反射点refi和所有假想反射点refi的点串。如式(4)所示,平行移动部19计算第2近似曲线y2(x),该第2近似曲线y2(x)表示包括所有原始反射点refj和所有假想反射点refj的点串。由于反射点refi的数量变为2倍,因此第1近似曲线y1(x)的计算精度比表示不包含假想反射点refi的点串的第1近似曲线y1(x)要更高。此外,由于反射点refj的数量变为2倍,因此第2近似曲线y2(x)的计算精度比表示不包含假想反射点refj的点串的第2近似曲线y2(x)要更高。近似曲线计算部21如图14所示,计算表示包含由平行移动部19进行平行移动后的所有反射点refi、refj的点串的近似曲线y
trans
(x)。图14是示出表示包含由平行移动部19平行移动后的所有反射点refi、refj的点串的近似曲线y
trans
(x)的说明图。在图14中,〇是平行移动后的原始反射点refi、refj,
△
是平行移动后的假想反射点refi、refj。
55.在图1所示的道路形状推定装置10中,平行移动部19计算表示包含被分类为第1组的所有反射点refi的点串的第1近似曲线y1(x),并计算表示包含被分类为第2组的所有反射点refj的点串的第2近似曲线y2(x)。平行移动部19也可以计算表示包含第1组所包括的所有分割区域中的代表反射点refu的点串的第1近似曲线y1(x),并计算表示包含第2组所包括的所有分割区域中的代表反射点refv的点串的第2近似曲线y2(x)。
56.若第1组所包括的分割区域的数量为m以上,则根据包含第1组所包括的所有分割
区域中的代表反射点refu的点串,可以计算出表示2次曲线的第1近似曲线y1(x)。此外,若第2组所包括的分割区域的数量为m以上,则根据包含第2组所包括的所有分割区域中的代表反射点refu的点串,可以计算出表示2次曲线的第2近似曲线y2(x)。u=1,...,u,u是包括在第1组中的分割区域的数量。v=1,...,v,v是包括在第2组中的分割区域的数量。
57.平行移动部19从包括在第1组中的各个分割区域内的多个反射点refi中提取一个代表反射点refu。代表反射点refu可以是例如多个反射点refi中离多个反射点refi的重心最近的反射点,也可以是与车辆距离最短的反射点。此外,平行移动部19从包括在第2组中的各个分割区域中的多个反射点refj中提取一个代表反射点refv。代表反射点refv可以是例如多个反射点refj中离多个反射点refj的重心最近的反射点,也可以是与车辆距离最短的反射点。图15是表示分别包含于第1组和第2组的分割区域以及第1近似曲线y1(x)和第2近似曲线y2(x)的说明图。
58.平行移动部19如下式(10)所示,计算第1近似曲线y1(x),该第1近似曲线y1(x)表示包含第1组所包括的所有分割区域中的代表反射点refu的点串。y1(x)=a1’
x2+b1’
x+c1’ꢀꢀ
(10)式(3)中,a1’
为2次系数,b1’
为1次系数,c1’
为常数项。此外,平行移动部19如下式(11)所示,计算第2近似曲线y2(x),该第2近似曲线y2(x)表示包含第2组所包括的所有分割区域中的代表反射点refv的点串。y2(x)=a2’
x2+b2’
x+c2’ꢀꢀ
(11)式(4)中,a2’
为2次系数,b2’
为1次系数,c2’
为常数项。
59.若计算出第1近似曲线y1(x),则平行移动部19如图15所示,使各个代表反射点refu向车辆的右侧方向(+y方向)平行移动第1近似曲线y1(x)中的常数项c1’
的值。若计算出第2近似曲线y2(x),则平行移动部19如图15所示,使各个代表反射点refv向车辆的左侧方向(-y方向)平行移动第2近似曲线y2(x)中的常数项c2’
的值。图16是示出包含平行移动后的反射点refu、refv的分割区域和表示包含平行移动后的所有反射点refu、refv的点串的近似曲线的说明图。
60.近似曲线计算部21例如使用最小2乘法,如下式(12)所示那样,计算近似曲线y
trans
(x),该近似曲线y
trans
(x)表示包含平行移动后的所有反射点refu、refv的点串。y
trans
(x)=a3’
x2+b3’
x+c3’ꢀꢀ
(12)式(12)中,a3’
为2次系数,b3’
为1次系数,c3’
为常数项。
61.形状推定处理部22如下式(13)所示,计算表示由近似曲线计算部21计算出的近似曲线y
trans
(x)中的曲率的2次系数a3’
和由平行移动部19计算出的第1近似曲线y1(x)中的1次系数b1’
以及常数项c1’
所表示的第3近似曲线y3(x)。y3(x)=a3’
x2+b1’
x+c1’ꢀꢀ
(13)
62.此外,形状推定处理部22如下式(14)所示,计算表示近似曲线y
trans
(x)中的曲率的2次系数a3’
和由平行移动部19计算出的第2近似曲线y2(x)中的1次系数b2’
以及常数项c2’
所表示的第4近似曲线y4(x)。y4(x)=a3’
x2+b2’
x+c2’ꢀꢀ
(14)
图17是表示第3近似曲线y3(x)及第4近似曲线y4(x)的说明图。形状推定处理部22根据第3近似曲线y3(x)和第4近似曲线y4(x)推定车辆行驶的道路的形状。
63.实施方式2在实施方式2中,对道路形状推定装置10进行说明,在该道路形状推定装置10中,道路形状推定部20将车辆存在的位置上的道路的方向设为与车辆的行进方向平行,并推定道路形状。
64.实施方式2的道路形状推定装置10的结构与实施方式1的道路形状推定装置10的结构相同,表示实施方式2的道路形状推定装置10的结构图是图1。
65.接着,对实施方式2所涉及的道路形状推定装置10的动作进行说明。反射点检测部11和反射点分类部16的动作与实施方式1相同,因此省略说明。如图18所示,平行移动部19从反射点分类部16获取被分类为第1组的所有反射点refi。如图18所示,平行移动部19从反射点分类部16获取被分类为第2组的所有反射点refj。图18是表示反射点refi和反射点refj、以及第1近似曲线y1(x)和第2近似曲线y2(x)的说明图。在图18的示例中,平行移动部19获取四个反射点refi,并获取三个反射点refj。
66.平行移动部19如下式(15)所示,计算第1近似曲线y1(x),该第1近似曲线y1(x)表示包含被分类为第1组的所有反射点refi的点串。平行移动部19在设置车辆存在的位置处的道路的方向与车辆的行进方向平行这一约束条件的基础上,计算出第1近似曲线y1(x)。因此,式(15)所示的第1近似曲线y1(x)不包含1次项。道路的方向是x轴坐标为“0”处与道路左端的切线方向、或x轴坐标为“0”处与道路右端的切线方向。但是,在此,为了说明的简单化,将与道路左端的切线方向和与道路右端的切线方向设为相同方向。因此,道路的方向与车辆的行进方向平行,这意味着该切线方向与车辆的行进方向平行。y1(x)=a
1”x2+c1”ꢀꢀ
(15)式(15)中,a
1”为2次系数,c
1”为常数项。
67.此外,平行移动部19如下式(16)所示,计算第2近似曲线y2(x),该第2近似曲线y2(x)表示包含被分类为第2组的所有反射点refj的点串。平行移动部19在设置车辆存在的位置处的道路的方向与车辆的行进方向平行这一约束条件的基础上,计算出第2近似曲线y2(x)。y2(x)=a
2”x2+c2”ꢀꢀ
(16)式(16)中,a
2”为2次系数,c
2”为常数项。
68.若计算出式(15)所示的第1近似曲线y1(x),则如图18所示那样,平行移动部19使被分类为第1组的各个反射点refi向车辆的右侧方向(+y方向)平行移动第1近似曲线y1(x)中的常数项c
1”的值。
若计算出式(16)所示的第2近似曲线y2(x),则如图18所示那样,平行移动部19使被分类为第2组的各个反射点refj向车辆的左侧方向(-y方向)平行移动第2近似曲线y2(x)中的常数项c
2”的值。
69.若各个反射点refi向+y方向平行移动常数项c
1”的值,各个反射点refj向-y方向平行移动常数项c
2”的值,则如图19所示,平行移动后的各个反射点refi以及平行移动后的各个反射点refj大致位于1条近似曲线上。大体上,位于1条近似曲线上的反射点的数量为m(=i+j)个。图19是表示平行移动后的反射点refi及平行移动后的反射点refj、以及表示包含平行移动后的所有反射点refi、refj的点串的近似曲线的说明图。
70.道路形状推定部20在设置车辆存在的位置处的道路的方向与车辆的行进方向平行这一约束条件的基础上,计算表示包含由平行移动部19平行移动后的全部反射点refi、refj的点串的近似曲线y
trans
(x)。道路形状推定部20根据近似曲线y
trans
(x)推定车辆行驶的道路的形状。以下,对道路形状推定单元20的道路形状的推定处理进行具体说明。
71.近似曲线计算部21如下式(17)所示那样,计算表示包含平行移动后的所有反射点refi、refj的点串的近似曲线y
trans
(x)。近似曲线计算部21在设置车辆存在的位置处的道路的方向与车辆的行进方向平行这一约束条件的基础上,计算出近似曲线y
trans
(x)。因此,式(17)所示的近似曲线y
trans
(x)不包含1次项。y
trans
(x)=a
3”x2+c3”ꢀꢀ
(17)式(17)中,a
3”为2次系数,c
3”为常数项。
72.形状推定处理部22如下式(18)所示,计算表示由近似曲线计算部21计算出的近似曲线y
trans
(x)中的曲率的2次系数a
3”和由平行移动部19计算出的第1近似曲线y1(x)中的常数项c
1”所表示的第3近似曲线y3(x)。y3(x)=a
3”x2+c1”ꢀꢀ
(18)
73.此外,形状推定处理部22如下式(19)所示,计算表示近似曲线y
trans
(x)中的曲率的2次系数a3和由平行移动部19计算出的第2近似曲线y2(x)中的常数项c
2”表示的第4近似曲线y4(x)。y4(x)=a
3”x2+c2”ꢀꢀ
(19)图20是表示第3近似曲线y3(x)及第4近似曲线y4(x)的说明图。
74.形状推定处理部22根据第3近似曲线y3(x)和第4近似曲线y4(x)推定车辆行驶的道路的形状。即,形状推定处理部22将第3近似曲线y3(x)表示的曲线形状推定为是道路左端的形状,并且将第4近似曲线y4(x)表示的曲线形状推定为是道路右端的形状。形状推定处理部22将道路形状的推定结果输出到例如车辆的未图示的控制装置。
75.在上述实施方式2中,道路形状推定装置10构成为,道路形状推定部20将车辆存在的位置处的道路的方向设为与车辆的行进方向平行,并推定道路形状。因此,与实施方式1所涉及的道路形状推定装置10相比,实施方式2所涉及的道路形状推定装置10中用于道路形状的推定的近似曲线的计算负荷得以减小。
76.实施方式3实施方式3中,对道路形状推定装置10进行说明,在该道路形状推定装置10中,道路形状推定部23在计算出包含由平行移动部19进行平行移动后的所有反射点的点串的近似曲线之后,使用上次计算出的近似曲线对计算出的近似曲线进行校正,根据校正后的近似曲线推定车辆行驶的道路的形状。
77.图21是表示实施方式3所涉及的道路形状推定装置10的结构图。在图21中,与图1相同的标号表示相同或相当部分,因此省略其说明。图22是表示实施方式3所涉及的道路形状推定装置10的硬件的硬件结构图。在图22中,与图2相同的标号表示相同或相当部分,因此省略其说明。
78.道路形状推定部23例如由图22所示的道路形状推定电路35实现。道路形状推定部23包括近似曲线计算部24和形状推定处理部22。道路形状推定部23与图1所示的道路形状推定部20相同,计算表示包含由平行移动部19进行平行移动后的所有反射点的点串的近似曲线。道路形状推定部23使用上次计算出的近似曲线对计算出的近似曲线进行校正,并根据校正后的近似曲线推定车辆行驶的道路的形状。
79.近似曲线计算部24与图1所示的近似曲线计算部21相同,计算表示包含由平行移动部19进行平行移动后的所有反射点的点串的近似曲线。近似曲线计算部24使用上次计算出的近似曲线校正计算出的近似曲线。近似曲线计算部24将校正后的近似曲线输出到形状推定处理部22。
80.图21中,假设作为道路形状推定装置10的构成要素的反射点检测部11、反射点分类部16、平行移动部19和道路形状推定部23分别由图22所示的专用硬件实现。即,假设道路形状推定装置10由反射点检测电路31、反射点分类电路32、平行移动电路33和道路形状推定电路35实现。反射点检测电路31、反射点分类电路32、平行移动电路33和道路形状推定电路35各自例如是单一电路、复合电路、程序化处理器、串联程序化处理器、asic、fpga、或它们的组合。
81.道路形状推定装置10的构成要素不限于由专用硬件实现,道路形状推定装置10可以由软件、固件或软件与固件的组合来实现。当道路形状推定装置10由软件或固件等实现时,用于使计算机执行反射点检测部11、反射点分类部16、平行移动部19和道路形状推定部23中的各个处理步骤的道路形状推定程序存储在图3所示的存储器41中。然后,图3所示的处理器42执行存储在存储器41中的道路形状推定程序。
82.此外,图22示出了道路形状推定装置10的各个构成要素由专用硬件实现的示例,图3示出了道路形状推定装置10由软件或固件等实现的示例。然而,这只是一个示例,道路形状推定装置10中的一部分构成要素可以通过专用硬件来实现,剩余构成要素可以通过软件或固件等来实现。
83.接着,对图21所示的道路形状推定装置10的动作进行说明。由于除了道路形状推定部23以外,与图1所示的道路形状推定装置10相同,因此在此仅说明道路形状推定部23的动作。
84.道路形状推定部23的近似曲线计算部24与图1所示的近似曲线计算部21相同,计算表示包含由平行移动部19进行平行移动后的所有反射点的点串的近似曲线y
trans
(x)。由近似曲线计算部24计算出的近似曲线y
trans
(x)在每次计算时可能大幅变动。由于近似曲线y
trans
(x)发生变动,形状推定处理部22的道路形状的推定结果有时会变得不稳定。近似曲线计算部24为了抑制近似曲线y
trans
(x)的变动,使用过去计算出的近似曲线y
trans
(x)来校正计算出的近似曲线y
trans
(x)。以下,具体说明近似曲线计算部24的近似曲线y
trans
(x)的校正处理。
85.近似曲线计算部24将本次计算出的最新的近似曲线y
trans
(x)设为第n帧的近似曲线y
trans
(x)n,将上次计算出的近似曲线y
trans
(x)设为第(n-1)帧的近似曲线y
trans
(x)
n-1
。n是2以上的整数。第n帧的近似曲线y
trans
(x)n中的2次系数记为a
1,n
,1次系数记为b
1,n
,常数项记为c
1,n
。并且,第(n-1)帧的近似曲线y
trans
(x)
n-1
中的2次系数记为a
1,n-1
,1次系数记为b
1,n-1
,常数项记为c
1,n-1
。
86.近似曲线计算部24校正第n帧的近似曲线y
trans
(x)。即,近似曲线计算部24如下式(20)所示那样,使用第(n-1)帧的近似曲线y
trans
(x)
n-1
中的2次系数a
1,n-1
、1次系数b
1,n-1
以及常数项c
1,n-1
,校正第n帧的近似曲线y
trans
(x)n中的2次系数a
1,n
、1次系数b
1,n
以及常数项c
1,n
。。。近似曲线计算部24将具有校正后的2次系数a
1,n
、校正后的1次系数b
1,n
以及校正后常数项c
1,n
的近似曲线y
trans(
x)作为校正后的近似曲线y
trans
(x)输出到形状推定处理部22。
87.在上述实施方式3中,道路形状推定装置10构成为,道路形状推定部23在计算出包含由平行移动部19进行平行移动后的所有反射点的点串的近似曲线之后,使用上次计算出的近似曲线对计算出的近似曲线进行校正,根据校正后的近似曲线推定车辆行驶的道路的形状。因此,实施方式3所涉及的道路形状推定装置10与实施方式1所涉及的道路形状推定装置10同样地,在左侧反射点的数量或右侧反射点的数量较少的情况下,也能够推定道路的形状,此外,与实施方式1所涉及的道路形状推定装置10相比,能够实现道路形状的推定结果的稳定化。
88.另外,本公开可以对各实施方式进行自由组合,或对各实施方式的任意构成要素进行变形、或省略各实施方式中的任意的构成要素。工业上的实用性
89.本公开涉及用于推定道路形状的雷达信号处理装置、道路形状推定方法和道路形状推定程序。
标号说明
90.1信号接收部、2 adc、10道路形状推定装置、11反射点检测部、12傅里叶变换部、13峰值检测部、14方位检测部、15反射点检测处理部、16反射点分类部、17组分类部、18组选择部、19平行移动部、20道路形状推定部、21近似曲线计算部、22形状推定处理部、23道路形状推定部、24近似曲线计算部、31反射点检测电路、32反射点分类电路、33平行移动电路、34道路形状推定电路、35道路形状推定电路、41存储器、42处理器、51车辆、52、53、54物体。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1