一种道路拍摄方法
1.本发明涉及道路智能快速巡检技术领域,尤其是涉及一种道路拍摄方法。
背景技术:
2.道路运输具有快捷、方便、门对门直达的优势,在国家经济发展中占有极其重要的地位。因此在新建道路的同时,必须对原有道路进行养护与维修作业,以确保行车安全并降低运营成本。
3.而利用机器学习算法对拍摄的图像进行智能化的自动识别,从而获得道路病害的定位与类别等信息,这种方法正逐渐成为道路快速巡检系统中重要的检测方法之一。其具有检测速度快、识别精度较高、设备安置简便以及设备价格低廉等多种优势,可以适应日常化道路巡检的需要。
4.但在基于图像的道路检测过程中,还存在一些问题值得优化,例如相机的拍摄频率与检测车速之间还未能有效匹配上。目前市面上的部分基于图像的道路检测系统,其相机的拍摄频率仅取决于相机自身的采样间隔,一旦相机的采样间隔低于检测车速,则有可能出现漏检情况。而另一些设备则通过加装车轮编码器来辅助相机拍摄,基本可以实现定距拍摄功能,避免漏检情况,但该方法的不足就在于需要安装额外的编码器及其配套的解算系统,加大了设备成本。
5.不仅如此,在当前现有的道路拍摄技术中,对于车辆速度的测定仅仅依靠车载相机的快门时间进行测定计算,而无法通过其他数据进行辅证,对道路拍摄过程中采样时间间隔的修正存在极大误差隐患,对于计算结果的准确性存在一定运算缺陷。
技术实现要素:
6.本发明的目的就是为了克服上述现有技术存在的缺陷而提供一种道路拍摄方法。
7.本发明的目的可以通过以下技术方案来实现:
8.一种道路拍摄方法,包括以下步骤:
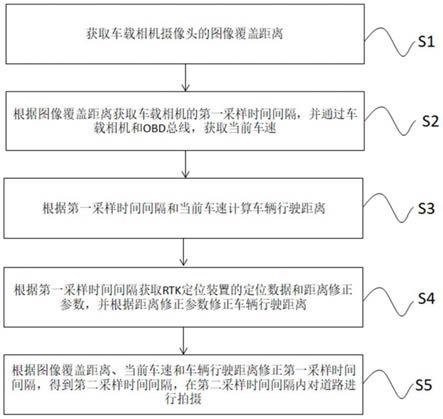
9.s1、获取车载相机摄像头的图像覆盖距离;
10.s2、根据图像覆盖距离获取车载相机的第一采样时间间隔,并通过车载相机和obd总线,获取当前车速;
11.s3、根据第一采样时间间隔和当前车速计算车辆行驶距离;
12.s4、根据第一采样时间间隔获取rtk定位装置的定位数据和距离修正参数,并根据距离修正参数修正车辆行驶距离;
13.s5、根据图像覆盖距离、当前车速和车辆行驶距离修正第一采样时间间隔,得到第二采样时间间隔,在第二采样时间间隔内对道路进行拍摄。
14.进一步地,所述步骤s5中第一采样时间间隔的修正方法如下:
15.若车辆行驶距离小于最大阈值且大于最小阈值,则不进行修正,所述第二采样时间间隔大小等于第一采样时间间隔;
16.若车辆行驶距离大于最大阈值,则根据以下公式修正第一采样时间间隔:
17.δt
′
=l
max
·
α/v
′
18.式中,δt
′
表示第二采样时间间隔,l
max
表示最大阈值,α表示冗余系数,v’表示当前车速;
19.若车辆行驶距离小于最小阈值,则根据以下公式修正第一采样时间间隔:
20.δt
′
=l
min
·
β/v
′
21.式中,δt
′
表示第二采样时间间隔,l
min
表示最小阈值,β表示补充系数,v’表示当前车速。
22.进一步地,所述最大阈值的取值范围为图像覆盖距离的0.6~1.0倍,所述最小阈值的值为为图像覆盖距离的0.2~0.4倍。
23.进一步地,所述冗余系数α的取值范围为0.6~1.0,所述补充系数β的值为1.0~1.4。
24.进一步地,所述步骤s4中,每获取一次定位数据,则对前两次获取定位数据进行差值运算,得到定位数据距离,并根据所述定位数据距离计算距离修正参数。
25.进一步地,所述距离修正参数k的计算表达式如下:
[0026][0027]
式中,∑s
′
为定位数据距离和,获取方式为:对两次定位数据之间的距离差在1秒内求和;
[0028]
∑s为车辆行驶距离和,获取方式为:对1秒内的车辆行驶距离求和。
[0029]
进一步地,当∑s
′‑
∑s的值大于0.1∑s
′
时,不对车辆行驶距离进行修正。
[0030]
进一步地,所述步骤s2中获取第一采样时间间隔δt的计算表达式如下:
[0031]
δt=0.8
·
l/(80/3.6)
[0032]
式中,l表示图像覆盖距离。
[0033]
进一步地,所述步骤s3中车辆行驶距离的计算表达式为:
[0034]
s=v
′
·
δt
[0035]
式中,δt表示第一采样时间间隔,v
′
表示当前车速,s表示车辆行驶距离;
[0036]
所述步骤s4中修正车辆行驶距离的计算表达式为:
[0037]
s=k
·v′
·
δt
[0038]
式中,k表示距离修正参数。
[0039]
进一步地,在步骤s2中获取当前车速后,对当前车速进行修正,修正方法为,在当前车速上加上固定修正值。
[0040]
与现有技术相比,本发明具有以下优点:
[0041]
1、本发明在拍摄道路时,对于车辆速度的测定结合了车载相机和odb总线,提高了车速检测的精确度,还通过rtk定位数据修正了车辆行驶的距离,并根据以上参数,对采样时间间隔进行修正,并进行拍摄。提高了拍摄的准确度,且设备成本较低。
[0042]
2、本发明设置了多种车辆行驶距离情况,针对不同车辆行驶距离情况提供了不同的采样时间间隔修正计算方法,精确度更高。
[0043]
3本发明同时对车速进行了修正,进一步确保了参数的准确度。
附图说明
[0044]
图1为本发明的流程示意图。
具体实施方式
[0045]
下面结合附图和具体实施例对本发明进行详细说明。本实施例以本发明技术方案为前提进行实施,给出了详细的实施方式和具体的操作过程,但本发明的保护范围不限于下述的实施例。
[0046]
本实施例提供了一种道路拍摄方法,流程如图1所示,具体包括以下步骤:
[0047]
步骤s1、将车载相机、rtk定位装置和obd总线连接至同一控制终端,车载相机采用可由系统命令触发快门的工业相机,该工业相机可容许的拍摄频率不应低于obd数据的最高采样频率,且二者均应不小于rtk的采样频率。并获取车载相机摄像头的图像覆盖距离。
[0048]
车载相机摄像头的图像覆盖距离指的是车载摄像头拍摄的图像中沿车辆行驶方向的可见范围,可通过如下步骤实测获取:开启车载相机,调整车载相机视角与路面保持平直,将一把尺子沿车辆行驶方向进行摆放,在车载相机的可视范围内读取距离车载相机最近的尺子读数和最远的尺子读数,将最近的尺子读数和最远的尺子读数进行差值计算,差值结果即为摄像头的图像覆盖距离。
[0049]
步骤s2、根据图像覆盖距离获取车载相机的第一采样时间间隔,并通过车载相机和obd总线,获取当前车速,具体包括:
[0050]
首先获取第一采样时间间隔,计算表达式如下:
[0051]
δt=0.8
·
l/(80/3.6)
[0052]
式中,l表示图像覆盖距离,单位为米,表示80km/h下满足移动距离0.8l的采样间隔时间。
[0053]
然后基于采样时间间隔间隔同时触发车载相机的快门和obd数据获取接口,基于obd数据获取接口获取的车载相机的快门数据和obd数据,获取车辆的车速信息。但由于obd系统获取的实际车辆速度一般会自动舍去小数部分,故其小于实际车速,需要进行修正,修正方法为,在获取到的车速上加上固定修正值0.5。
[0054]
步骤s3、根据第一采样时间间隔和当前车速计算车辆行驶距离,计算表达式如下:
[0055]
s=v
′
·
δt
[0056]
式中,δt表示第一采样时间间隔,v
′
表示当前车速,s表示车辆行驶距离,此时测得的车辆行驶距离为初始车辆行驶距离,需要在步骤s4中进行修正。
[0057]
步骤s4、根据第一采样时间间隔获取rtk定位装置的定位数据和距离修正参数,并根据距离修正参数修正车辆行驶距离,具体包括:
[0058]
定位数据通过rtk定位装置获取,而距离修正参数的获取方法如下:
[0059]
每获取一次定位数据,就计算前两次获取的定位数据的差值s
′
,并计算出累积时间1秒内的定位数据距离和∑s
′
以及车辆行驶距离和∑s,并通过以下计算表达式计算距离修正参数k:
[0060][0061]
计算出距离修正参数后,通过以下计算表达式修正车辆行驶距离:
[0062]
s=k
·v′
·
δt
[0063]
值得说明的是,若在某一秒内,∑s
′‑
∑s的值大于0.1∑s
′
,则不对车辆行驶距离进行修正。
[0064]
步骤s5、对车辆行驶距离修正后,根据图像覆盖距离、当前车速和车辆行驶距离修正第一采样时间间隔,得到第二采样时间间隔,具体包括:
[0065]
首先,判断车辆行驶距离是否符合拍摄要求,若车辆行驶距离小于最大阈值且大于最小阈值,则不进行修正,第二采样时间间隔的大小即为第一采样时间间隔的大小。
[0066]
若车辆行驶距离大于最大阈值,则根据以下公式修正第一采样时间间隔:
[0067]
δt
′
=l
max
·
α/v
′
[0068]
式中,δt
′
表示第二采样时间间隔,l
max
表示最大阈值,α表示冗余系数,在本实施例中取0.8,v’表示当前车速;
[0069]
若车辆行驶距离小于最小阈值,则根据以下公式修正第一采样时间间隔:
[0070]
δt
′
=l
min
·
β/v
′
[0071]
式中,δt
′
表示第二采样时间间隔,l
min
表示最小阈值,β表示补充系数,在本实施例中取1.2,v’表示当前车速。
[0072]
值得说明的是,最大阈值和最小阈值可依据设备的性能及需求而定,经实际测试,本实施例中选用的最大阈值的值为0.8倍的图像覆盖距离,本实施例中选用的最小阈值的值为0.3倍的图像覆盖距离。
[0073]
修正得到第二采样时间间隔后,在第二采样时间间隔内对道路进行拍摄。
[0074]
本实施例对于车辆速度的测定结合了车载相机和odb总线,提高了车速检测的精确度,还通过rtkk定位数据修正了车辆行驶的距离,并根据以上参数,对采样时间间隔进行修正,并进行拍摄。提高了拍摄的准确度,且设备成本较低。
[0075]
在本实施例中术语“第一”、“第二”等仅用于区分描述,而不能理解为指示或暗示相对重要性。
[0076]
以上详细描述了本发明的较佳具体实施例。应当理解,本领域的普通技术人员无需创造性劳动就可以根据本发明的构思作出诸多修改和变化。因此,凡本技术领域中技术人员依本发明的构思在现有技术的基础上通过逻辑分析、推理或者有限的实验可以得到的技术方案,皆应在由权利要求书所确定的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1