智能网联环境下的场站路径引导方法、系统和存储介质与流程
1.本发明涉及智能停车技术领域,尤其是涉及一种智能网联环境下的场站路径引导方法、系统和存储介质。
背景技术:
2.随着智能交通系统以及车路协同技术的发展,对场站进行基础设施改造与升级变得越发普遍。
3.城市中车辆保有量也在逐年持续增长,人们选择汽车出行也十分普遍,城市中的相应的停车场不足,城市中汽车“行车难,停车难”的现象已经十分常见,非常影响人们的出行体验。
4.目前,常见的停车场设备主要有显示停车场的车位空置数量,而停车场常常是设置在地下,在地下停车场中的导航信号通常较弱,车主在地下停车场中,仅能够通过自身判断来规划停车路径。这样导致了地下停车库停车效率低下,容易发生塞堵,车主使用体验不佳,而停车场需要派专门的引导人员进行引导的问题,加大了停车场的运营成本。
技术实现要素:
5.本发明的目的在于克服上述技术不足,提出一种智能网联环境下的场站路径引导方法、系统和存储介质,解决现有技术中停车场容易发生堵塞,车主使用体验较差、停车场运营成本较高的技术问题。
6.为达到上述技术目的,第一方面,本发明的技术方案提供一种智能网联环境下的场站路径引导方法,应用于mec(multi-access edge computin,多接入边缘计算)端,包括以下步骤:
7.从路侧设备接收车辆的入场请求信息,所述入场请求信息包括所述车辆当前位置;
8.获取所述场站的地图信息和车位信息;
9.根据所述入场请求信息、所述场站的地图信息和车位信息确定推荐车位;
10.根据所述入场请求信息、所述场站的地图信息和所述推荐车位,计算所述车辆当前位置到所述推荐车位的所有可能路径的行程时间;
11.选择行程时间最小的所述可能路径作为规划路径,并将所述推荐车位和所述规划路径发送到所述路侧设备,以使所述路侧设备通知所述车辆。
12.与现有技术相比,本发明提供的种智能网联环境下的场站路径引导方法的有益效果包括:
13.目前,场站的路径规划方法,主要基于停车场路段的距离或行程时间作为权重,采用dijkstra算法、floyd算法等进行最短路径的求解。但是在计算路径的过程中往往不考虑节点最为一个具有实际物理空间概念的区域,从而忽略考虑节点。
14.本实施例在考虑路段行程时间的基础上,考虑驾驶员在节点处进行不同转向操作
通过节点的行程时间,以规划路径通过路段以及节点的总行程时间最短为目标,寻找最优路径;同时考虑引导路径减少频繁转向的次数,引入“路径顺畅度”的概念,在不同路径总行程时间接近的情况下,生成更为合理的引导路径。能够有效提升车主在停车场的使用体验,提升停车场的使用效率,降低停车场的运营成本。
15.本实施例利用智能网联环境下的vir以及pam消息集提供的车辆入场请求信息以及场站内部地图和车位状态信息,并结合路侧传感器感知的道路目标结构化数据,综合考虑车辆预计停放时间、进出便利性以及驾驶员的便利性完成推荐车位的计算,并以此车位所在节点为目的地,进行路径规划。路径规划方面考虑在考虑路段交通阻抗的基础上,进一步考虑车辆以不同转向操作通过节点的行程时间,引导车辆更快寻找到目标车位,同时使得规划的路线更为合理,时间预估也更为精准。
16.此外在不同规划路线路段与节点总行程时间接近的情况下,引入“路径顺畅度”的概念,考虑驾驶员对于路径频繁转向的忍耐程度,从而帮助现在更为合理的推荐路径。
17.根据本发明的一些实施例,所述入场请求信息至少包括以下一种:车辆id、申请时间、预计停放时长、所述车辆当前经纬度位置和请求停车位类型。
18.根据本发明的一些实施例,所述计算所述车辆当前位置到所述推荐车位的所有可能路径的行程时间,包括步骤:
19.识别所述场站的所有目标车,并记录所有所述目标车所处的路段,记录各个路段上的车辆数量,计算得到所述车辆在路段的所述行程时间;
20.计算所述车辆在转弯节点的所述行程时间;
21.根据所述车辆在路段的所述行程时间和在转弯节点的所述行程时间,计算得到所述车辆总的所述行程时间。
22.根据本发明的一些实施例,当多个所述可能路径的所述行程时间相近,选择所述转弯节点较少的所述可能路径作为所述规划路径。
23.根据本发明的一些实施例,所述识别所述场站的所有目标车,包括步骤:
24.通过雷达和摄像头识别所述场站的所有目标车,记录所述目标车的经纬度位置信息、速度信息以及航向角信息。
25.第二方面,本发明的技术方案提供一种智能网联环境下的场站路径引导方法,应用于路侧设备,包括以下步骤:
26.接收来自车辆的入场请求信息,所述入场请求信息包括所述车辆当前位置、车辆id、申请时间、预计停放时长、所述车辆当前经纬度位置和请求停车位类型;
27.将所述入场请求信息发送到mec端,以使所述mec端根据所述入场请求信息、场站的地图信息和车位信息为所述车辆推荐车位并提供规划路径;
28.接收来自所述mec端的规划信息,所述规划信息包括所述推荐车位和所述规划路径;
29.将所述规划信息发送到所述车辆。
30.第三方面,本发明的技术方案提供一种智能网联环境下的场站路径引导方法,应用于车辆,包括以下步骤:
31.向路侧设备发送入场请求信息,所述入场请求信息包括所述车辆当前位置、车辆id、申请时间、预计停放时长、所述车辆当前经纬度位置和请求停车位类型;
32.接收来自所述路侧设备的规划信息,所述规划信息包括所述推荐车位信息和所述规划路径;
33.根据所述推荐车位信息和所述规划路径行驶到所述推荐车位。
34.根据本发明的一些实施例,在所述接收来自所述路侧设备的规划信息之后,包括步骤:
35.所述规划信息包括目标id,将所述目标id与所述车辆id进行比对;
36.当所述目标id与所述车辆id相同,根据所述推荐车位信息和所述规划路径行驶到所述推荐车位。
37.第四方面,本发明的技术方案提供一种智能网联环境下的场站路径引导系统,包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如第一方面中任意一项所述的智能网联环境下的场站路径引导方法。
38.第五方面,本发明的技术方案提供一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有计算机可执行指令,所述计算机可执行指令用于使计算机执行如第一方面中任意一项所述的智能网联环境下的场站路径引导方法。
39.本发明的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
附图说明
40.本发明的上述和/或附加的方面和优点从结合下面附图对实施例的描述中将变得明显和容易理解,其中摘要附图要与说明书附图的其中一幅完全一致:
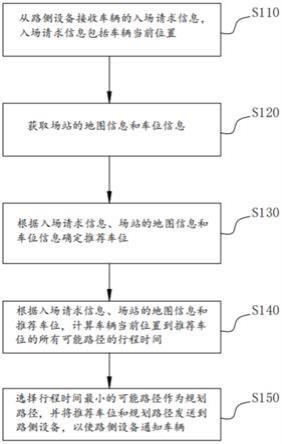
41.图1为本发明一个实施例提供的智能网联环境下的场站路径引导方法的流程图;
42.图2为本发明另一个实施例提供的智能网联环境下的场站路径引导方法的流程图;
43.图3为本发明另一个实施例提供的智能网联环境下的场站路径引导方法的流程图;
44.图4为本发明另一个实施例提供的智能网联环境下的场站路径引导方法的流程图。
具体实施方式
45.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
46.需要说明的是,虽然在系统示意图中进行了功能模块划分,在流程图中示出了逻辑顺序,但是在某些情况下,可以以不同于系统中的模块划分,或流程图中的顺序执行所示出或描述的步骤。说明书和权利要求书及上述附图中的术语“第一”、“第二”等是用于区别类似的对象,而不必用于描述特定的顺序或先后次序。
47.随着智能交通系统以及车路协同技术的发展,对场站进行基础设施改造与升级变得越发普遍。针对停车场的智慧化改造一般通过在路侧安装rsu设备负责v2x通信;安装路
侧传感器(激光雷达、毫米波雷达、摄像头等)进行目标检测;安装mec边缘计算节点进行边缘计算处理相应数据;在车端安装obu设备与路侧rsu进行通信。网联环境下的场站路径引导基于rsu设备提供的pam信息以及路侧传感器信息进行车位推荐以及路径生成,并下发至obu设备沿规划路径前往目标车位。
48.目前,场站的路径规划方法,主要基于停车场路段的距离或行程时间作为权重,采用dijkstra算法、floyd算法等进行最短路径的求解。但是在计算路径的过程中往往不考虑节点最为一个具有实际物理空间概念的区域,从而忽略考虑节点。
49.本发明提供了一种智能网联环境下的场站路径引导方法,在考虑路段行程时间的基础上,考虑驾驶员在节点处进行不同转向操作通过节点的行程时间,以规划路径通过路段以及节点的总行程时间最短为目标,寻找最优路径;同时考虑引导路径减少频繁转向的次数,引入“路径顺畅度”的概念,在不同路径总行程时间接近的情况下,生成更为合理的引导路径。能够有效提升车主在停车场的使用体验,提升停车场的使用效率,降低停车场的运营成本。
50.下面结合附图,对本发明实施例作进一步阐述。
51.参照图1,图1为本发明一个实施例提供的智能网联环境下的场站路径引导方法的流程图,智能网联环境下的场站路径引导方法包括但是不仅限于步骤s110至步骤s150。
52.步骤s110,从路侧设备接收车辆的入场请求信息,入场请求信息包括车辆当前位置;
53.步骤s120,获取场站的地图信息和车位信息;
54.步骤s130,根据入场请求信息、场站的地图信息和车位信息确定推荐车位;
55.步骤s140,根据入场请求信息、场站的地图信息和推荐车位,计算车辆当前位置到推荐车位的所有可能路径的行程时间;
56.步骤s150,选择行程时间最小的可能路径作为规划路径,并将推荐车位和规划路径发送到路侧设备,以使路侧设备通知车辆。
57.在一实施例中,智能网联环境下的场站路径引导方法应用于mec端,首先,从路侧设备接收车辆的入场请求信息,入场请求信息包括车辆当前位置;然后,获取场站的地图信息和车位信息,根据入场请求信息、场站的地图信息和车位信息确定推荐车位;其次,根据入场请求信息、场站的地图信息和推荐车位,计算车辆当前位置到推荐车位的所有可能路径的行程时间;最后,选择行程时间最小的可能路径作为规划路径,并将推荐车位和规划路径发送到路侧设备,以使路侧设备通知车辆。
58.本实施例在考虑路段行程时间的基础上,考虑驾驶员在节点处进行不同转向操作通过节点的行程时间,以规划路径通过路段以及节点的总行程时间最短为目标,寻找最优路径;同时考虑引导路径减少频繁转向的次数,引入“路径顺畅度”的概念,在不同路径总行程时间接近的情况下,生成更为合理的引导路径。能够有效提升车主在停车场的使用体验,提升停车场的使用效率,降低停车场的运营成本。
59.利用智能网联环境下的vir以及pam消息集提供的车辆入场请求信息以及场站内部地图和车位状态信息,并结合路侧传感器感知的道路目标结构化数据,综合考虑车辆预计停放时间、进出便利性以及驾驶员的便利性完成推荐车位的计算,并以此车位所在节点为目的地,进行路径规划。路径规划方面考虑在考虑路段交通阻抗的基础上,进一步考虑车
辆以不同转向操作通过节点的行程时间,引导车辆更快寻找到目标车位,同时使得规划的路线更为合理,时间预估也更为精准。此外在不同规划路线路段与节点总行程时间接近的情况下,引入“路径顺畅度”的概念,考虑驾驶员对于路径频繁转向的忍耐程度,从而帮助现在更为合理的推荐路径。
60.在一实施例中,智能网联环境下的场站路径引导方法应用于mec端,首先,从路侧设备接收车辆的入场请求信息,入场请求信息包括车辆当前位置;然后,获取场站的地图信息和车位信息,根据入场请求信息、场站的地图信息和车位信息确定推荐车位;其次,根据入场请求信息、场站的地图信息和推荐车位,计算车辆当前位置到推荐车位的所有可能路径的行程时间;最后,选择行程时间最小的可能路径作为规划路径,并将推荐车位和规划路径发送到路侧设备,以使路侧设备通知车辆。入场请求信息至少包括以下一种:车辆id、申请时间、预计停放时长、车辆当前经纬度位置和请求停车位类型。
61.入场请求信息包括了车辆id,便于mec端判断入场请求信息的发送者,也便于后续将规划路径和推荐车位按照车辆id回传到车辆,车辆的当前位置便于推荐合理的路径,根据预计停放时长和请求停车位类型推荐合理的车位,具有很好的实用价值。
62.参考图2,图2为本发明另一个实施例提供的智能网联环境下的场站路径引导方法的流程图,智能网联环境下的场站路径引导方法包括但是不仅限于步骤s210至步骤s230。
63.步骤s210,识别场站的所有目标车,并记录所有目标车所处的路段,记录各个路段上的车辆数量,计算得到车辆在路段的行程时间;
64.步骤s220,计算车辆在转弯节点的行程时间;
65.步骤s230,根据车辆在路段的行程时间和在转弯节点的行程时间,计算得到车辆总的行程时间。
66.在一实施例中,智能网联环境下的场站路径引导方法应用于mec端,首先,从路侧设备接收车辆的入场请求信息,入场请求信息包括车辆当前位置;然后,获取场站的地图信息和车位信息,根据入场请求信息、场站的地图信息和车位信息确定推荐车位;其次,根据入场请求信息、场站的地图信息和推荐车位,计算车辆当前位置到推荐车位的所有可能路径的行程时间;最后,选择行程时间最小的可能路径作为规划路径,并将推荐车位和规划路径发送到路侧设备,以使路侧设备通知车辆。入场请求信息至少包括以下一种:车辆id、申请时间、预计停放时长、车辆当前经纬度位置和请求停车位类型。
67.计算车辆当前位置到推荐车位的所有可能路径的行程时间,包括步骤:识别场站的所有目标车,并记录所有目标车所处的路段,记录各个路段上的车辆数量,计算得到车辆在路段的行程时间;计算车辆在转弯节点的行程时间;根据车辆在路段的行程时间和在转弯节点的行程时间,计算得到车辆总的行程时间。
68.在一实施例中,智能网联环境下的场站路径引导方法应用于mec端,首先,从路侧设备接收车辆的入场请求信息,入场请求信息包括车辆当前位置;然后,获取场站的地图信息和车位信息,根据入场请求信息、场站的地图信息和车位信息确定推荐车位;其次,根据入场请求信息、场站的地图信息和推荐车位,计算车辆当前位置到推荐车位的所有可能路径的行程时间;最后,选择行程时间最小的可能路径作为规划路径,并将推荐车位和规划路径发送到路侧设备,以使路侧设备通知车辆。入场请求信息至少包括以下一种:车辆id、申请时间、预计停放时长、车辆当前经纬度位置和请求停车位类型。
69.计算车辆当前位置到推荐车位的所有可能路径的行程时间,包括步骤:识别场站的所有目标车,并记录所有目标车所处的路段,记录各个路段上的车辆数量,计算得到车辆在路段的行程时间;计算车辆在转弯节点的行程时间;根据车辆在路段的行程时间和在转弯节点的行程时间,计算得到车辆总的行程时间。当多个可能路径的行程时间相近,选择转弯节点较少的可能路径作为规划路径。
70.在一实施例中,智能网联环境下的场站路径引导方法应用于mec端,首先,从路侧设备接收车辆的入场请求信息,入场请求信息包括车辆当前位置;然后,获取场站的地图信息和车位信息,根据入场请求信息、场站的地图信息和车位信息确定推荐车位;其次,根据入场请求信息、场站的地图信息和推荐车位,计算车辆当前位置到推荐车位的所有可能路径的行程时间;最后,选择行程时间最小的可能路径作为规划路径,并将推荐车位和规划路径发送到路侧设备,以使路侧设备通知车辆。入场请求信息至少包括以下一种:车辆id、申请时间、预计停放时长、车辆当前经纬度位置和请求停车位类型。
71.计算车辆当前位置到推荐车位的所有可能路径的行程时间,包括步骤:识别场站的所有目标车,并记录所有目标车所处的路段,记录各个路段上的车辆数量,计算得到车辆在路段的行程时间;计算车辆在转弯节点的行程时间;根据车辆在路段的行程时间和在转弯节点的行程时间,计算得到车辆总的行程时间。识别场站的所有目标车,包括步骤:通过雷达和摄像头识别场站的所有目标车,记录目标车的经纬度位置信息、速度信息以及航向角信息。
72.参考图3,图3为本发明另一个实施例提供的智能网联环境下的场站路径引导方法的流程图,智能网联环境下的场站路径引导方法包括但是不仅限于步骤s310至步骤s340。
73.步骤s310,接收来自车辆的入场请求信息,入场请求信息包括车辆当前位置、车辆id、申请时间、预计停放时长、车辆当前经纬度位置和请求停车位类型;
74.步骤s320,将入场请求信息发送到mec端,以使mec端根据入场请求信息、场站的地图信息和车位信息为车辆推荐车位并提供规划路径;
75.步骤s330,接收来自mec端的规划信息,规划信息包括推荐车位和规划路径;
76.步骤s340,将规划信息发送到车辆。
77.在一实施例中,智能网联环境下的场站路径引导方法应用于路侧设备,首先,接收来自车辆的入场请求信息,入场请求信息包括车辆当前位置、车辆id、申请时间、预计停放时长、车辆当前经纬度位置和请求停车位类型;然后,将入场请求信息发送到mec端,以使mec端根据入场请求信息、场站的地图信息和车位信息为车辆推荐车位并提供规划路径;最后,接收来自mec端的规划信息,规划信息包括推荐车位和规划路径,将规划信息发送到车辆。
78.参考图4,图4为本发明另一个实施例提供的智能网联环境下的场站路径引导方法的流程图,智能网联环境下的场站路径引导方法包括但是不仅限于步骤s410至步骤s430。
79.步骤s410,向路侧设备发送入场请求信息,入场请求信息包括车辆当前位置、车辆id、申请时间、预计停放时长、车辆当前经纬度位置和请求停车位类型;
80.步骤s420,接收来自路侧设备的规划信息,规划信息包括推荐车位信息和规划路径;
81.步骤s430,根据推荐车位信息和规划路径行驶到推荐车位。
82.在一实施例中,智能网联环境下的场站路径引导方法应用于车辆,首先,向路侧设备发送入场请求信息,入场请求信息包括车辆当前位置、车辆id、申请时间、预计停放时长、车辆当前经纬度位置和请求停车位类型;然后,接收来自路侧设备的规划信息,规划信息包括推荐车位信息和规划路径;最后,根据推荐车位信息和规划路径行驶到推荐车位。
83.在一实施例中,智能网联环境下的场站路径引导方法应用于车辆,首先,向路侧设备发送入场请求信息,入场请求信息包括车辆当前位置、车辆id、申请时间、预计停放时长、车辆当前经纬度位置和请求停车位类型;然后,接收来自路侧设备的规划信息,规划信息包括推荐车位信息和规划路径;最后,根据推荐车位信息和规划路径行驶到推荐车位。在接收来自路侧设备的规划信息之后,包括步骤:规划信息包括目标id,将目标id与车辆id进行比对;当目标id与车辆id相同,根据推荐车位信息和规划路径行驶到推荐车位。
84.在一实施例中,智能网联环境下的场站路径引导方法包括以下步骤:
85.步骤1:智能网联车辆通过obu设备发送入场请求信息vir
86.装备有obu(on-board unit)设备的智能网联车辆,需首先通过c-v2x(cellular vehicle to everything)或dsrc(dedicated short range communications)的通讯方式与路侧设备rsu(roadside unit)进行v2i(vehicle to infrastructure)通讯,向场站入口处的rsu设备发送vir消息,进行入场请求。
87.vir信息包含有申请入场的智能网联车辆的车辆id、申请时刻的时间戳、预计停放时长、当前所处的经纬度位置以及请求的停车位类型等。
88.步骤2:mec从rsu设备获取车辆的入场请求信息以及场站内部地图与车位信息
89.mec与rsu设备通过汇聚交换机进行有线通讯。rsu设备将步骤1获取的智能网联车辆入场请求信息vir以及存储在rsu设备内部的pam消息传输至mec端。mec通过对vir以及pam消息的解析,获取车辆的停车意图以及预计停放时长,以及场站内部地图与车位信息。
90.需要说明的是,pam通过定义场站内部的地图节点详细描述场站内部的地图以及车位信息。场站的节点是地图的最基本的组成部分,可以是交叉口也可以是一个路段的端点。在地图上,顺序的两个节点确定一条有向路段,假设当前节点记为nj,上游节点记为ni,则有有向路段r(ni,nj)。pam进一步在有向路段r(ni,nj)上定义路段中心线(通过中心线经纬度位置点的序列表示)、车道宽度以及车道数等车道信息以及附属于该车道的车位信息,包括各车位的顶角经纬度位置、车位类型、停车状态等。pam通过以上方式,将场站的完整内部地图信息以及车位信息进行结构化。
91.步骤3:mec结合车辆入场请求以及pam地图携带的车位状态信息确定最优推荐车位
92.mec端通过步骤2获取车辆请求车位类型数据,筛选pam地图中,符合该停车位需求条件的空闲车位,形成候选车位列表。对于可供停车的候选车位,还需进一步进行处理,以找到智能网联汽车停车的最优推荐车位。综合考虑智能网联汽车在停车位的停车时长、驾驶员在场站停车位停放车辆完毕后的去往别处的便利性以及车辆进出场站的便利性,采取一种最优推荐车位的搜索原则如下:
93.考虑驾驶员在场站停车位停放车辆完毕后的去往别处的便利性,最优推荐车位的搜索优先考虑电梯位置,即驾驶员在停车后可以最便捷地通过电梯去往自己的目的地;
94.考虑车辆进出场站的便利性,最优推荐车位考虑智能网联车辆从场站入口到推荐
车位停车的行驶距离与智能网联汽车离场到停车场出口的行驶距离之和最短为目标。
95.考虑智能网联汽车在停车位的停车时长,对于停车时间较长的智能网联汽车,优先推荐较为深层的停车位置,以留有更多上层车位供停车时间较短的车辆频繁使用车位。
96.考虑以上原则,假设停车场层数共计n层,从楼层上往下分别记为f1,f2,...,fn;每层有电梯出入口m个。用l
ij
(fi,latj,lonj)表示第fi层的第j(j=1,2,3,...,m)个电梯的位置。
97.智能网联车辆的预计停放时长记为t
p
,停放时间阈值记为t
p
,即当t
p
≤t
p
成立时,对于最优推荐车位的搜索按f1,f2,...,fn的楼层顺序进行;当t
p
》t
p
成立时,对于最优推荐车位的搜索按fn,f
n-1
,...,f1的顺序进行。
98.搜索过程按确定的楼层顺序逐层进行,本发明实施例中,以f1层为例,首先通过pam消息中的停车位与节点的对应关系,找到该层可供停车的候选车位所对应的所有节点,并获取节点的经纬度,第i个记为计算各节点与该层各电梯的距离d
ij
如式1所示:
[0099][0100]
若d
ij
满足式2所示,则存在节点有可供停车的候选车位,进一步计算停车场入口至该节点的最短引导路径长度以及该节点至停车场出口的最短引导路径长度,以确定最优推荐车位。若不存在满足式2的节点,则将距离阈值增大,重复计算直至节点存在。
[0101]dij
≤d
t
+n
·
δd
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)
[0102]
式中,d
t
为距离阈值的初始值,一般可选20m;δd为在无符合初始距离阈值的节点存在时,阈值增大的步长,推荐也为20m。即不断以电梯为中心,扩大搜索半径,从可供停车的候选车位对应的节点中中进一步找到满足驾驶员停车地点距离电梯最近条件的车位,并将该节点的可供停车车位添加进新的候选车位列表。
[0103]
若新的候选车位列表内只存在1个车位,则无需进行智能网联车辆从场站入口到推荐车位停车的行驶距离与智能网联汽车离场到停车场出口行驶距离的计算,直接将该车位定为最优推荐车位;若新的候选车位列表内存在多个车位,且这些车位隶属于同一节点,同样无需进行进一步计算,此时从该节点的多个可供停车车位中随机选取一个作为最优推荐车位;若新的候选车位列表内存在多个车位,但分别隶属于多个节点,则需进一步计算智能网联车辆从场站路口到推荐车位停车的行驶距离与智能网联汽车离场到停车场出口行驶距离之和,选取距离和最小的节点最为最优节点,而后随机选取隶属于该节点的可供停车车位作为最优推荐车位。
[0104]
计算智能网联车辆从场站入口到候选节点车位停车的行驶距离d1与智能网联汽车离场到停车场出口行驶距离d2,需通过pam消息集加载停车场路网信息,读取停车场各节点之间路段的中心线信息。提取路段中线第一个与最后一个点的经纬度坐标,通过式1计算两点间距离,记为路段长度,路段由上游节点ni以及当前节点nj表示,记为r(ni,nj),该路段的长度记为
[0105]
对于d1,设定起点为停车场入口节点,终点为候选车位所属节点,通过遍历节点的不同顺序排列,搜索求得令其有最短路径长度的路径节点序列,将其最短路径长度对应的路径的节点序列记为(n0,n1,n2,...nn)。对于d2,设定起点为候选车位所属节点,终点为停车
场出口节点,通过遍历节点的不同顺序排列,搜索求得令其有最短路径长度的路径节点序列,将其最短路径长度对应的路径的节点序列记为(n'0,n'1,n'2,...,n'm)。
[0106]
对于车辆经停候选车位在停车场行驶的最小总距离记为d
t
,最优推荐车位应使其最小,如式3所示:
[0107][0108]
遍历节点求得令d
t
最小的节点所属的空闲车位作为最优推荐车位。
[0109]
步骤4:mec端获取路侧传感器输出的目标结构化数据并匹配路段
[0110]
本发明实施例通过在场站内部路侧部署各类传感器(包括激光雷达、毫米波雷达、摄像头等)对目标进行检测,获取目标的结构化数据,包括目标的经纬度位置、速度以及航向角等数据。各传感器通过汇聚交换机连接至mec端进行融合,并输出融合后的目标结构化数据。并用输出的目标结构化数据与场站的路段进行匹配,统计各路段实时的车辆数。
[0111]
对于每一个检测目标都需要进行路段匹配,首先遍历所有节点,寻找可疑节点,然后通过pam信息遍历定义在此节点上的所有路段,寻找匹配路段;若在该节点上定义的路段无匹配结果,则遍历下一个可疑节点的所有路段,直至找到检测目标的匹配路段。本发明实施例以匹配第i个目标所处路段为例:
[0112]
假设路侧传感器共检测到n个目标,其中第i(i=1,2,3,...,n)个目标的经纬度位置,以及航向角分别为lati、loni、hi。停车场路网节点共m个,其中第j个节的经纬度位置为由式1可计算各个目标的经纬度与所有节点的经纬度距离由于真实停车场的节点并不仅仅是一个点,而是两个路段的交叉区域,对于处于节点上的目标不做路段匹配。因此需满足式4条件,方可作为可疑节点候选。
[0113][0114]
式中,dn为节点实际范围的半径,通过实际停车场节点大小确定。
[0115]
对于满足式4的节点,按照由小到大的顺序,将目标依次与节点所属路段进行匹配,若目标遍历相应节点所属路段未匹配,则选取下一个节点的所属路段进行匹配,直至匹配到路段,输出该目标与路段的对应关系。目标与节点对应的路段进行匹配的过程如下:
[0116]
首先通过节点信息,从pam消息中读取定义在该节点上的多个路段,路段由道路中心线的经纬度点坐标构成的序列组成,读取每条路段的起始点经纬度坐标lats,lons以及终点经纬度坐标late,lone,计算得到该有向路段长度l以及朝向h
l
。
[0117]
通过式1计算目标点位置lati、loni与各路段起始点坐标的距离la以及目标点位置与各路段终点坐标的距离lb。l,la,lb三边构成三角形,计算以边l为底,目标点为顶点的三角形的两个底角a1与a2,如式5、6所示:
[0118][0119]
[0120]
若目标点与节点所属某一路段同时符合式7的条件,则可判定目标点处在该路段上,从而获得该目标点与路段的对应关系。
[0121][0122]
式中,h为判断路段方向与目标航向角方向是否一致的差值容忍阈值。两个底角小于90
°
则可排除路段方向与目标航向角方向一致但是但处于同向的其他路段,可排除目标点与有向路段r(n2,n0)的匹配。
[0123]
遍历完所有目标点,找到所有目标点所处的路段后,统计各路段上存在的车辆数,记为n(ni,nj)表示有向路段r(ni,nj)上的车辆数。
[0124]
步骤5:通过匹配到路段上的车辆数更新道路交通阻抗
[0125]
道路交通阻抗(traffic impedance of road)是以车辆通过道路的平均行程时间(重量或费用)表示路段的交通难易程度,本发明实施例采用路段的旅行时间作为道路交通阻抗。
[0126]
由于路段上存在车辆会对车辆的行驶时间产生影响。理想情况下,路段的长度与在没有其他车辆干扰的情况下的期望速度的比值即为期望旅行时间。但随着路段上车辆数目的增多,其花费的期望时间也逐渐增多,因此需对路段的旅行时间进行修正,如式8所示:
[0127][0128]
式中,为车辆在上游节点ni以及当前节点nj构成的有向路段r(ni,nj)上行驶的期望时间;α
ij
为有向路段r(i,j)车辆数对车辆行驶时间影响的折算系数,如式9所示;为有向路段r(ni,nj)的长度;为车辆在无其他车辆影响的情况下,在停车场内有向路段r(i,j)上行驶的期望速度,可根据实际测定获取,一般推荐取值5km/h。
[0129]
步骤4已获得有向路段r(ni,nj)上的车辆数n(ni,nj),因此通过n(ni,nj)确定有向路段r(i,j)车辆数对车辆行驶时间影响的折算系数α
ij
,如式9所示:
[0130][0131]
步骤6:考虑转向操作的道路节点行程时间计算
[0132]
由于车辆经过场站节点时,往往会存在其他方向的车辆干扰行驶或者驾驶员处于安全考虑谨慎假设,车辆在通过场站节点时往往会减速以保持安全通过,从而增加总行程时间。且车辆在通过场站节点的总时间相对于从起点到目标车位的总行程时间占有很大比例,不应忽略。
[0133]
综合考虑节点的实际空间属性、车辆通过节点的减速特征以及车辆左转、直行、右转等行驶特征,估算车辆选择不同下游节点时,通过该当前节点的行程时间。
[0134]
上游节点ni以及当前节点nj构成的有向路段r(ni,nj)的车道宽以及车道数分被记为w(ni,nj)以及n
l
(ni,nj)。有向路段r(i,j)的下游节点列表以及转向信息可从pam消息集中获取。
[0135]
假设路段r(i,j)的一个下游节点为nk,t(ni,nj,nk)表示车辆在有向路段r(i,j)经过节点nj驶向下游节点nk,车辆通过节点nj所需的行程时间。考虑不同的转向操作经过节点时行驶的距离以及速度不同,需要分情况计算相应的节点行程时间,如式10所示。
[0136][0137]
式中,β1为车辆在节点左转时的速度衰减系数;β2为车辆在节点直行时速度衰减系数;β3为车辆在节点右转时的速度衰减系数。
[0138]
步骤7:场站引导路径计算
[0139]
本发明实施例计算引导路径,假设起始节点ps(停车场入口)记为n0,终点节点pd(推荐的最优车位所属节点)记为nn。则最优路径的节点序列(n0,n1,n2,...,nn)应满足车辆经过该路径所有路段以及节点的总行程时间t(ps,pd)最小。车辆在路段的行程时间(即道路交通阻抗)由步骤5获得;车辆通过节点的行程时间由步骤6获得。
[0140]
考虑到驾驶心理,驾驶员在不同路线行驶时间相近的情况下,偏向于选择较为平直的路径,减少转向操作。路线1与路线2在行程时间总体接近的前提下,驾驶员往往倾向于考虑减少转向次数的路线。因此,本文档引入“路径顺畅度”的概念将其定义为车辆在场站内节点的当量转向次数,记为i',并对当量转向次数进行时间修正。“路径顺畅度”的计算如式11所示。该式右侧用于表征驾驶员对折算转向次数的忍耐程度,介于0-1之间,当折算转向次数较小时,其值也相对较小,此时表现为淡化个别折算转向次数对驾驶员心理耐受程度的影响。随着折算转向次数增多,该值不断增大,此时表现为折算转向次数对驾驶员心理耐受程度的影响增大,总而计算得到当量转向次数。
[0141][0142]
式中,i为车辆按规划路径在场站内节点的折算转向次数,i=μ1·nl
+μ2·ns
+μ3·
nr,其中μ1为车辆按规划路径在节点左转的折算系数,默认取值1;n
l
为规划路径在节点左转的总次数;μ2为车辆按规划路径在节点直行的折算系数,默认取值0.1,考虑直行也存在受到其他转向车辆影响的可能;ns为规划路径在节点直行的总次数;μ3为车辆按规划路径在节点右转的折算系数,默认取值0.9;nr为规划路径在节点右转的总次数。
[0143]
综上考虑,欲满足车辆经过该路径所有路段以及节点的总行程时间t(ps,pd)最小,应有式12成立:
[0144][0145]
式中,δt为对应车辆在场站内节点的当量转向次数的单位折减时间。
[0146]
解上述方程,通过pam读取的节点关系连接表,遍历所有可能路径,即可解得考虑“路径顺畅度”的行程时间最短路径(n0,n1,n2,...,nn)。
[0147]
步骤8:规划路线发送至rsu设备并填入pam消息集中进行广播
[0148]
引导路径的计算结果(n0,n1,n2,...,nn)输出为有序的节点列表。mec端计算得到此结果后,将其发送至rsu端。rsu将其填入pam消息集中对应的场站区域路径引导信息中,结合车辆id等信息向外广播。
[0149]
步骤9:智能网联车辆接收pam消息,读取规划路径前往最优推荐车位
[0150]
发送入场请求信息vir消息的车辆接收到pam消息后,对路径引导信息进行解析,若信息携带的目标车辆id为自身车辆id,则读取pam消息中的推荐路径,并按该路径引导行驶至推荐车位所在节点,并驶入泊位。
[0151]
本发明还提供了一种智能网联环境下的场站路径引导系统,包括:存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,处理器执行计算机程序时实现如上述的智能网联环境下的场站路径引导方法。
[0152]
处理器和存储器可以通过总线或者其他方式连接。
[0153]
存储器作为一种非暂态计算机可读存储介质,可用于存储非暂态软件程序以及非暂态性计算机可执行程序。此外,存储器可以包括高速随机存取存储器,还可以包括非暂态存储器,例如至少一个磁盘存储器件、闪存器件、或其他非暂态固态存储器件。在一些实施方式中,存储器可选包括相对于处理器远程设置的存储器,这些远程存储器可以通过网络连接至该处理器。上述网络的实例包括但不限于互联网、企业内部网、局域网、移动通信网及其组合。
[0154]
需要说明的是,本实施例中的智能网联环境下的场站路径引导系统,可以包括有业务处理模块、边缘端数据库、服务端版本信息寄存器、数据同步模块,处理器执行计算机程序时实现如上述应用在智能网联环境下的场站路径引导系统的智能网联环境下的场站路径引导方法。
[0155]
以上所描述的装置实施例仅仅是示意性的,其中作为分离部件说明的单元可以是或者也可以不是物理上分开的,即可以位于一个地方,或者也可以分布到多个网络单元上。可以根据实际的需要选择其中的部分或者全部模块来实现本实施例方案的目的。
[0156]
此外,本发明的一个实施例还提供了一种计算机可读存储介质,该计算机可读存储介质存储有计算机可执行指令,该计算机可执行指令被一个处理器或控制器执行,例如,被上述终端实施例中的一个处理器执行,可使得上述处理器执行上述实施例中的智能网联环境下的场站路径引导方法。
[0157]
本领域普通技术人员可以理解,上文中所公开方法中的全部或某些步骤、系统可以被实施为软件、固件、硬件及其适当的组合。某些物理组件或所有物理组件可以被实施为由处理器,如中央处理器、数字信号处理器或微处理器执行的软件,或者被实施为硬件,或者被实施为集成电路,如专用集成电路。这样的软件可以分布在计算机可读介质上,计算机
可读介质可以包括计算机存储介质(或非暂时性介质)和通信介质(或暂时性介质)。如本领域普通技术人员公知的,术语计算机存储介质包括在用于存储信息(诸如计算机可读指令、数据结构、程序模块或其他数据)的任何方法或技术中实施的易失性和非易失性、可移除和不可移除介质。计算机存储介质包括但不限于ram、rom、eeprom、闪存或其他存储器技术、cd-rom、数字多功能盘(dvd)或其他光盘存储、磁盒、磁带、磁盘存储或其他磁存储装置、或者可以用于存储期望的信息并且可以被计算机访问的任何其他的介质。此外,本领域普通技术人员公知的是,通信介质通常包含计算机可读指令、数据结构、程序模块或者诸如载波或其他传输机制之类的调制数据信号中的其他数据,并且可包括任何信息递送介质。
[0158]
以上是对本发明的较佳实施进行了具体说明,但本发明并不局限于上述实施方式,熟悉本领域的技术人员在不违背本发明精神的前提下还可作出种种的等同变形或替换,这些等同的变形或替换均包含在本发明权利要求所限定的范围内。
[0159]
以上所述本发明的具体实施方式,并不构成对本发明保护范围的限定。任何根据本发明的技术构思所做出的各种其他相应的改变与变形,均应包含在本发明权利要求的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1