一种汽车安全驾驶车载预警装置及预警方法与流程
1.本发明涉及新能源汽车安全预警领域,更具体地说,本发明涉及一种汽车安全驾驶车载预警装置及预警方法。
背景技术:
2.现阶段,车载预警装置通常只能对实时监测的状态进行报警提示,难以形成更加提前的前置预警,难以进行全面完善的汽车驾驶安全防护;如何通过路况环境分析识别信息对车载预警雷达进行启动触发是较难解决的技术问题;如何对车载预警雷达的预警信息进行提前预警分析决策,以及如何启动对应的汽车驾驶安全防护尚待完善;因此,有必要提出一种汽车安全驾驶车载预警装置及预警方法,以至少部分地解决现有技术中存在的问题。
技术实现要素:
3.在发明内容部分中引入了一系列简化形式的概念,这将在具体实施方式部分中进一步详细说明。本发明的发明内容部分并不意味着要试图限定出所要求保护的技术方案的关键特征和必要技术特征,更不意味着试图确定所要求保护的技术方案的保护范围。
4.为至少部分地解决上述问题,本发明提供了一种汽车安全驾驶车载预警装置,包括:
5.行驶路况车周探测单元,用于对汽车驾驶过程中的行驶路况和车身周围环境探测,获得路况环境分析识别信息;
6.预警雷达对接释放单元,用于将路况环境分析识别信息和主动控制信号转换为驾驶行车指令,将对接固定在车顶的车载预警雷达进行启动释放;
7.预警雷达升降变角单元,用于对预警雷达进行高度升降调节,变换预警雷达照射角度,进行预警信息传输交互;
8.安全驾驶决策预警单元,用于对车载预警雷达的预警信息进行预警分析决策发出预警报警,并根据预警类型启动对应的汽车驾驶安全防护。
9.优选的,所述行驶路况车周探测单元包括:
10.驾驶路况探测子单元,用于通过光电探测元件对汽车驾驶过程中的行驶路况进行驾驶路况光电探测;
11.车周环境监测子单元,用于通过车身周围的环境检测对汽车行驶过程中进行车身周围环境监测;
12.路况环境识别子单元,用于通过对驾驶路况光电探测和车身周围环境监测进行分析识别,获得路况环境分析识别信息。
13.优选的,所述预警雷达对接释放单元包括:
14.行车指令转换子单元,用于接收路况环境分析识别信息,并接收主动控制信号,并将路况环境分析识别信息和主动控制信号转换为驾驶行车指令;
15.预警雷达启动子单元,用于根据驾驶行车指令触发车载预警雷达启动信号;
16.预警雷达释放子单元,用于根据车载预警雷达启动信号,将对接固定在车顶的车载预警雷达进行启动释放。
17.优选的,所述预警雷达对接释放单元包括:
18.预警雷达高度升降子单元,用于在车载预警雷达启动释放后对预警雷达进行高度升降调节,增减预警雷达的照射范围;
19.预警雷达角度变换子单元,用于在车载预警雷达高度升降调节过程中,变换预警雷达照射角度;
20.车载预警信息传输子单元,用于将车载预警雷达探照信息和车载预警报警报警以及预警系统控制信息进行预警信息传输交互。
21.优选的,所述安全驾驶决策预警单元包括:
22.安全驾驶智能策略子单元,用于根据安全驾驶规定和安全驾驶规则建立安全驾驶智能策略模型;
23.预警信息分析决策子单元,用于通过安全驾驶智能策略模型对车载预警雷达的预警信息进行预警分析决策;
24.预警报警安全防护子单元,用于根据预警分析决策发出预警报警,并根据预警类型启动对应的汽车驾驶安全防护。
25.一种汽车安全驾驶车载预警方法,包括:
26.s100,对汽车驾驶过程中的行驶路况和车身周围环境探测,获得路况环境分析识别信息;
27.s200,将路况环境分析识别信息和主动控制信号转换为驾驶行车指令,将对接固定在车顶的车载预警雷达进行启动释放;
28.s300,对预警雷达进行高度升降调节,变换预警雷达照射角度,进行预警信息传输交互;
29.s400,对车载预警雷达的预警信息进行预警分析决策发出预警报警,并根据预警类型启动对应的汽车驾驶安全防护。
30.优选的,所述s100包括:
31.s101,通过光电探测元件对汽车驾驶过程中的行驶路况进行驾驶路况光电探测;
32.s102,通过车身周围的环境检测对汽车行驶过程中进行车身周围环境监测;
33.s103,通过对驾驶路况光电探测和车身周围环境监测进行分析识别,获得路况环境分析识别信息。
34.优选的,所述s200包括:
35.s201,接收路况环境分析识别信息,并接收主动控制信号,并将路况环境分析识别信息和主动控制信号转换为驾驶行车指令;
36.s202,根据驾驶行车指令触发车载预警雷达启动信号;
37.s203,根据车载预警雷达启动信号,将对接固定在车顶的车载预警雷达进行启动释放。
38.优选的,所述s300包括:
39.s301,在车载预警雷达启动释放后对预警雷达进行高度升降调节,增减预警雷达
的照射范围;
40.s302,在车载预警雷达高度升降调节过程中,变换预警雷达照射角度;步骤包括:通过雷达稳定平台承载激光雷达载荷,包括雷达承载缓冲垫和固定在所述雷达承载缓冲垫上的雷达承载台,所述雷达承载缓冲垫的底部具有向下凸出的立轴,所述立轴旋转带动所述激光雷达载荷方位回转,所述雷达承载台两侧具有俯仰轴,所述俯仰轴转动带动所述激光雷达载荷俯仰,所述雷达承载缓冲垫和雷达承载台的内部均形成有空腔;激光雷达载荷,用于满足不同环境条件下的目标探测功能,包括激光发射体、雷达载荷舱以及集成于所述雷达载荷舱内的激光扫描镜、激光测距单元、猫眼探测单元、激光压制单元以及综合处理单元,所述雷达载荷舱两端通过俯仰轴转动安装在所述雷达承载台内;雷达电控组,用于提供动力驱动以及对所述雷达稳定平台进行伺服控制和对所述激光雷达载荷进行图像处理,包括安装在所述雷达承载缓冲垫空腔内的驱动器和编码器、安装在所述雷达承载台一侧空腔内的伺服主控板以及安装在所述雷达承载台另一侧空腔内的跟踪消旋板;电子测角器,用于实时监测所述雷达探测系统的姿态,包括彼此独立安装的单轴陀螺和双轴陀螺,所述单轴陀螺安装在所述雷达承载台的一侧空腔内并与所述伺服主控板处于相同一侧,所述双轴陀螺安装在所述雷达载荷舱的内部;高度升降组,用于承载所述雷达稳定平台并驱动所述雷达稳定平台升降和倒伏,包括用于实现升降运动的升降模块和用于实现俯仰和方位回转运动的倒伏模块;发射激光对目标进行照射并接收反射激光,设置有用于实时感知所述高度升降组扭转量并导出惯导数据的惯导系统;利用惯导的姿态角和雷达稳定平台的方位俯仰角度,解算出激光雷达载荷视轴相对于惯导坐标系的姿态,利用雷达稳定平台做空间位置闭环将激光雷达载荷视轴稳定在空间位置;所述雷达稳定平台、雷达电控组、激光雷达载荷、电子测角器、高度升降组、以及惯导系统之间相互通信连接并最终连接到雷达控制中心;
41.s303,将车载预警雷达探照信息和车载预警报警报警以及预警系统控制信息进行预警信息传输交互。
42.优选的,所述s400包括:
43.s401,根据安全驾驶规定和安全驾驶规则建立安全驾驶智能策略模型;
44.s402,通过安全驾驶智能策略模型对车载预警雷达的预警信息进行预警分析决策;包括安全驾驶规则信息中心、安全驾驶智能策略模型分析模块、安全驾驶决策模块、安全驾驶云平台以及汽车驾驶端;所述的安全驾驶规则信息中心包括历史驾驶规范信息分区、实时驾驶规范信息分区、基础道路信息分区、应急预案信息分区、安全距离运算模型信息分区以及预警信息分区;所述的安全驾驶智能策略模型分析模块对实时驾驶规范信息分区和历史驾驶规范信息分区中的驾驶信息数据进行预处理后,对时间序列数据进行分段线性表示达到维压缩的目的,进而将实时驾驶规范数据与历史驾驶规范资料数据进行相似匹配,并根据相似匹配结果做出驾驶过程预警,如果实时驾驶规范数据达到预警阈值,安全驾驶智能策略模型分析模块将实时驾驶规范数据以及相匹配的历史驾驶规范资料数据存储到预警信息分区中;所述的安全驾驶决策模块是基于道路模型信息展示安全驾驶决策信息,包括调用预警资料数据、应急预案资料数据对驾驶过程进行模拟展示以及应急预案生成,调用实时驾驶规范的事故数据进行展示,安全驾驶决策模块的模拟数据与应急预案资料数据也存储到预警信息分区中,并通过部署的安全驾驶云平台来将地图服务和数据展示
到汽车驾驶端的汽车驾驶端;所述的历史驾驶规范信息分区包括存储历史事故名称、事故实测和事故预报数据、驾驶过程等级数据;所述的实时驾驶规范信息分区定时接收远程数据采集系统传输的实时驾驶规范数据,设置信息中心文件自动扩展与表收缩以适应数据的实时录入;所述的基础道路信息分区存储基础道路信息数据,包括道路和道路高度方向的空间数据、属性数据以及影像数据;所述的应急预案信息分区存储历史事故预案和设计预案,历史事故预案和设计预案;所述的安全距离运算模型信息分区存储用于选取驾驶过程指标、事故预判模拟、驾驶过程等级划分的模型以及其中涉及的模型智能分析;所述的预警信息分区存储安全驾驶智能策略模型分析模块得到的匹配结果数据、预判模拟评估数据、驾驶过程等级划分数据,预警信息分区中的数据在预警解除后存储到应急预案信息分区中;所述的安全驾驶智能策略模型分析模块主要是对数据进行预处理后,对时间序列数据进行分段线性表示达到维压缩的目的,进而与历史驾驶规范资料数据进行相似匹配,并根据相似匹配结果做出驾驶过程预警;所述的安全驾驶决策模块基于道路模型信息展示安全驾驶决策信息,并通过部署的安全驾驶云平台来展示到汽车驾驶端;
45.s403,根据预警分析决策发出预警报警,并根据预警类型启动对应的汽车驾驶安全防护。
46.相比现有技术,本发明至少包括以下有益效果:
47.本发明一种汽车安全驾驶车载预警装置及预警方法,对汽车驾驶过程中的行驶路况和车身周围环境探测,获得路况环境分析识别信息;将路况环境分析识别信息和主动控制信号转换为驾驶行车指令,将对接固定在车顶的车载预警雷达进行启动释放;对预警雷达进行高度升降调节,变换预警雷达照射角度,进行预警信息传输交互;对车载预警雷达的预警信息进行预警分析决策发出预警报警,并根据预警类型启动对应的汽车驾驶安全防护;通过车载探测系统探测行驶路况和车身周围环境,当探测分析识别行驶路况不良或周围环境复杂时,将路况环境分析识别信息和主动控制信号转换为驾驶行车指令,进一步升起车载预警雷达,扩大雷达探测范围、提高探测精确度,通过信息分析智能决策,对车载预警雷达的预警信息进行预警分析决策,并发出预警报警,包括驾驶路面状况异常预警、驾驶环境异常预警、车辆与路面障碍物距离接近预警和/或车辆与环境物体相对速度碰撞预警;并根据预警类型启动对应的汽车驾驶安全防护,包括驾驶路面状况异常安全防护、驾驶环境异常安全防护、车辆与路面障碍物距离接近降速防护和/或车辆与环境物体相对速度碰撞躲避安全防护;能够对汽车驾驶过程中的行驶路况进行驾驶路况光电探测,对汽车行驶过程中进行车身周围环境监测并进行路况环境分析识别;将路况环境分析识别信息和主动控制信号转换为驾驶行车指令,根据驾驶行车指令触发车载预警雷达启动信号并将对接固定在车顶的车载预警雷达进行启动释放;能够增减预警雷达的照射范围、变换预警雷达照射角度闭关进行预警信息传输交互;建立安全驾驶智能策略模型对车载预警雷达的预警信息进行预警分析决策,根据预警类型启动对应的汽车驾驶安全防护;能够提供更前置的汽车驾驶安全预警和更完善的汽车驾驶安全防护。
48.本发明所述的一种汽车安全驾驶车载预警装置及预警方法,本发明的其它优点、目标和特征将部分通过下面的说明体现,部分还将通过对本发明的研究和实践而为本领域的技术人员所理解。
附图说明
49.附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。在附图中:
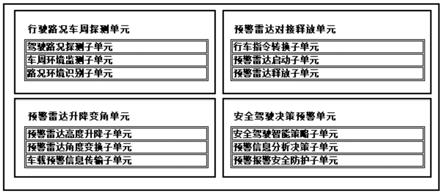
50.图1为本发明所述的一种汽车安全驾驶车载预警装置结构图。
51.图2为本发明所述的一种汽车安全驾驶车载预警方法步骤图。
52.图3为本发明所述的一种汽车安全驾驶车载预警方法实施例图。
具体实施方式
53.下面结合附图以及实施例对本发明做进一步的详细说明,以令本领域技术人员参照说明书文字能够据以实施。如图1-3所示,本发明提供了一种汽车安全驾驶车载预警装置,包括:
54.行驶路况车周探测单元,用于对汽车驾驶过程中的行驶路况和车身周围环境探测,获得路况环境分析识别信息;
55.预警雷达对接释放单元,用于将路况环境分析识别信息和主动控制信号转换为驾驶行车指令,将对接固定在车顶的车载预警雷达进行启动释放;
56.预警雷达升降变角单元,用于对预警雷达进行高度升降调节,变换预警雷达照射角度,进行预警信息传输交互;
57.安全驾驶决策预警单元,用于对车载预警雷达的预警信息进行预警分析决策发出预警报警,并根据预警类型启动对应的汽车驾驶安全防护。
58.上述技术方案的工作原理为,一种汽车安全驾驶车载预警装置,包括:行驶路况车周探测单元,用于对汽车驾驶过程中的行驶路况和车身周围环境探测,获得路况环境分析识别信息;预警雷达对接释放单元,用于将路况环境分析识别信息和主动控制信号转换为驾驶行车指令,将对接固定在车顶的车载预警雷达进行启动释放;预警雷达升降变角单元,用于对预警雷达进行高度升降调节,变换预警雷达照射角度,进行预警信息传输交互;安全驾驶决策预警单元,用于对车载预警雷达的预警信息进行预警分析决策发出预警报警,并根据预警类型启动对应的汽车驾驶安全防护;通过车载探测系统探测行驶路况和车身周围环境,当探测分析识别行驶路况不良或周围环境复杂时,将路况环境分析识别信息和主动控制信号转换为驾驶行车指令,进一步升起车载预警雷达,扩大雷达探测范围、提高探测精确度,通过信息分析智能决策,对车载预警雷达的预警信息进行预警分析决策,并发出预警报警,包括驾驶路面状况异常预警、驾驶环境异常预警、车辆与路面障碍物距离接近预警和/或车辆与环境物体相对速度碰撞预警;并根据预警类型启动对应的汽车驾驶安全防护,包括驾驶路面状况异常安全防护、驾驶环境异常安全防护、车辆与路面障碍物距离接近降速防护和/或车辆与环境物体相对速度碰撞躲避安全防护。
59.上述技术方案的有益效果为,一种汽车安全驾驶车载预警装置,对汽车驾驶过程中的行驶路况和车身周围环境探测,获得路况环境分析识别信息;将路况环境分析识别信息和主动控制信号转换为驾驶行车指令,将对接固定在车顶的车载预警雷达进行启动释放;对预警雷达进行高度升降调节,变换预警雷达照射角度,进行预警信息传输交互;对车载预警雷达的预警信息进行预警分析决策发出预警报警,并根据预警类型启动对应的汽车驾驶安全防护;通过车载探测系统探测行驶路况和车身周围环境,当探测分析识别行驶路
况不良或周围环境复杂时,将路况环境分析识别信息和主动控制信号转换为驾驶行车指令,进一步升起车载预警雷达,扩大雷达探测范围、提高探测精确度,通过信息分析智能决策,对车载预警雷达的预警信息进行预警分析决策,并发出预警报警,包括驾驶路面状况异常预警、驾驶环境异常预警、车辆与路面障碍物距离接近预警和/或车辆与环境物体相对速度碰撞预警;并根据预警类型启动对应的汽车驾驶安全防护,包括驾驶路面状况异常安全防护、驾驶环境异常安全防护、车辆与路面障碍物距离接近降速防护和/或车辆与环境物体相对速度碰撞躲避安全防护;能够对汽车驾驶过程中的行驶路况进行驾驶路况光电探测,对汽车行驶过程中进行车身周围环境监测并进行路况环境分析识别;将路况环境分析识别信息和主动控制信号转换为驾驶行车指令,根据驾驶行车指令触发车载预警雷达启动信号并将对接固定在车顶的车载预警雷达进行启动释放;能够增减预警雷达的照射范围、变换预警雷达照射角度闭关进行预警信息传输交互;建立安全驾驶智能策略模型对车载预警雷达的预警信息进行预警分析决策,根据预警类型启动对应的汽车驾驶安全防护;能够提供更前置的汽车驾驶安全预警和更完善的汽车驾驶安全防护。
60.在一个实施例中,所述行驶路况车周探测单元包括:
61.驾驶路况探测子单元,用于通过光电探测元件对汽车驾驶过程中的行驶路况进行驾驶路况光电探测;
62.车周环境监测子单元,用于通过车身周围的环境检测对汽车行驶过程中进行车身周围环境监测;
63.路况环境识别子单元,用于通过对驾驶路况光电探测和车身周围环境监测进行分析识别,获得路况环境分析识别信息。
64.上述技术方案的工作原理为,所述行驶路况车周探测单元包括:驾驶路况探测子单元,用于通过光电探测元件对汽车驾驶过程中的行驶路况进行驾驶路况光电探测;车周环境监测子单元,用于通过车身周围的环境检测对汽车行驶过程中进行车身周围环境监测;路况环境识别子单元,用于通过对驾驶路况光电探测和车身周围环境监测进行分析识别,获得路况环境分析识别信息。
65.上述技术方案的有益效果为,所述行驶路况车周探测单元包括:驾驶路况探测子单元,用于通过光电探测元件对汽车驾驶过程中的行驶路况进行驾驶路况光电探测;车周环境监测子单元,用于通过车身周围的环境检测对汽车行驶过程中进行车身周围环境监测;路况环境识别子单元,用于通过对驾驶路况光电探测和车身周围环境监测进行分析识别,获得路况环境分析识别信息。
66.在一个实施例中,所述预警雷达对接释放单元包括:
67.行车指令转换子单元,用于接收路况环境分析识别信息,并接收主动控制信号,并将路况环境分析识别信息和主动控制信号转换为驾驶行车指令;
68.预警雷达启动子单元,用于根据驾驶行车指令触发车载预警雷达启动信号;
69.预警雷达释放子单元,用于根据车载预警雷达启动信号,将对接固定在车顶的车载预警雷达进行启动释放。
70.上述技术方案的工作原理为,所述预警雷达对接释放单元包括:行车指令转换子单元,用于接收路况环境分析识别信息,并接收主动控制信号,并将路况环境分析识别信息和主动控制信号转换为驾驶行车指令;预警雷达启动子单元,用于根据驾驶行车指令触发
车载预警雷达启动信号;预警雷达释放子单元,用于根据车载预警雷达启动信号,将对接固定在车顶的车载预警雷达进行启动释放。
71.上述技术方案的有益效果为,所述预警雷达对接释放单元包括:行车指令转换子单元,用于接收路况环境分析识别信息,并接收主动控制信号,并将路况环境分析识别信息和主动控制信号转换为驾驶行车指令;预警雷达启动子单元,用于根据驾驶行车指令触发车载预警雷达启动信号;预警雷达释放子单元,用于根据车载预警雷达启动信号,将对接固定在车顶的车载预警雷达进行启动释放。
72.在一个实施例中,所述预警雷达对接释放单元包括:
73.预警雷达高度升降子单元,用于在车载预警雷达启动释放后对预警雷达进行高度升降调节,增减预警雷达的照射范围;
74.预警雷达角度变换子单元,用于在车载预警雷达高度升降调节过程中,变换预警雷达照射角度;
75.车载预警信息传输子单元,用于将车载预警雷达探照信息和车载预警报警报警以及预警系统控制信息进行预警信息传输交互。
76.上述技术方案的工作原理为,所述预警雷达对接释放单元包括:预警雷达高度升降子单元,用于在车载预警雷达启动释放后对预警雷达进行高度升降调节,增减预警雷达的照射范围;预警雷达角度变换子单元,用于在车载预警雷达高度升降调节过程中,变换预警雷达照射角度;车载预警信息传输子单元,用于将车载预警雷达探照信息和车载预警报警报警以及预警系统控制信息进行预警信息传输交互。
77.上述技术方案的有益效果为,所述预警雷达对接释放单元包括:预警雷达高度升降子单元,用于在车载预警雷达启动释放后对预警雷达进行高度升降调节,增减预警雷达的照射范围;预警雷达角度变换子单元,用于在车载预警雷达高度升降调节过程中,变换预警雷达照射角度;车载预警信息传输子单元,用于将车载预警雷达探照信息和车载预警报警报警以及预警系统控制信息进行预警信息传输交互。
78.在一个实施例中,所述安全驾驶决策预警单元包括:
79.安全驾驶智能策略子单元,用于根据安全驾驶规定和安全驾驶规则建立安全驾驶智能策略模型;
80.预警信息分析决策子单元,用于通过安全驾驶智能策略模型对车载预警雷达的预警信息进行预警分析决策;
81.预警报警安全防护子单元,用于根据预警分析决策发出预警报警,并根据预警类型启动对应的汽车驾驶安全防护。
82.上述技术方案的工作原理为,所述安全驾驶决策预警单元包括:安全驾驶智能策略子单元,用于根据安全驾驶规定和安全驾驶规则建立安全驾驶智能策略模型;预警信息分析决策子单元,用于通过安全驾驶智能策略模型对车载预警雷达的预警信息进行预警分析决策;预警报警安全防护子单元,用于根据预警分析决策发出预警报警,并根据预警类型启动对应的汽车驾驶安全防护。
83.上述技术方案的有益效果为,所述安全驾驶决策预警单元包括:安全驾驶智能策略子单元,用于根据安全驾驶规定和安全驾驶规则建立安全驾驶智能策略模型;预警信息分析决策子单元,用于通过安全驾驶智能策略模型对车载预警雷达的预警信息进行预警分
析决策;预警报警安全防护子单元,用于根据预警分析决策发出预警报警,并根据预警类型启动对应的汽车驾驶安全防护。
84.一种汽车安全驾驶车载预警方法,包括:
85.s100,对汽车驾驶过程中的行驶路况和车身周围环境探测,获得路况环境分析识别信息;
86.s200,将路况环境分析识别信息和主动控制信号转换为驾驶行车指令,将对接固定在车顶的车载预警雷达进行启动释放;
87.s300,对预警雷达进行高度升降调节,变换预警雷达照射角度,进行预警信息传输交互;
88.s400,对车载预警雷达的预警信息进行预警分析决策发出预警报警,并根据预警类型启动对应的汽车驾驶安全防护。
89.上述技术方案的工作原理为,一种汽车安全驾驶车载预警方法,包括:对汽车驾驶过程中的行驶路况和车身周围环境探测,获得路况环境分析识别信息;将路况环境分析识别信息和主动控制信号转换为驾驶行车指令,将对接固定在车顶的车载预警雷达进行启动释放;对预警雷达进行高度升降调节,变换预警雷达照射角度,进行预警信息传输交互;对车载预警雷达的预警信息进行预警分析决策发出预警报警,并根据预警类型启动对应的汽车驾驶安全防护;通过车载探测系统探测行驶路况和车身周围环境,当探测分析识别行驶路况不良或周围环境复杂时,将路况环境分析识别信息和主动控制信号转换为驾驶行车指令,进一步升起车载预警雷达,扩大雷达探测范围、提高探测精确度,通过信息分析智能决策,对车载预警雷达的预警信息进行预警分析决策,并发出预警报警,包括驾驶路面状况异常预警、驾驶环境异常预警、车辆与路面障碍物距离接近预警和/或车辆与环境物体相对速度碰撞预警;并根据预警类型启动对应的汽车驾驶安全防护,包括驾驶路面状况异常安全防护、驾驶环境异常安全防护、车辆与路面障碍物距离接近降速防护和/或车辆与环境物体相对速度碰撞躲避安全防护。
90.上述技术方案的有益效果为,一种汽车安全驾驶车载预警方法,对汽车驾驶过程中的行驶路况和车身周围环境探测,获得路况环境分析识别信息;将路况环境分析识别信息和主动控制信号转换为驾驶行车指令,将对接固定在车顶的车载预警雷达进行启动释放;对预警雷达进行高度升降调节,变换预警雷达照射角度,进行预警信息传输交互;对车载预警雷达的预警信息进行预警分析决策发出预警报警,并根据预警类型启动对应的汽车驾驶安全防护;通过车载探测系统探测行驶路况和车身周围环境,当探测分析识别行驶路况不良或周围环境复杂时,将路况环境分析识别信息和主动控制信号转换为驾驶行车指令,进一步升起车载预警雷达,扩大雷达探测范围、提高探测精确度,通过信息分析智能决策,对车载预警雷达的预警信息进行预警分析决策,并发出预警报警,包括驾驶路面状况异常预警、驾驶环境异常预警、车辆与路面障碍物距离接近预警和/或车辆与环境物体相对速度碰撞预警;并根据预警类型启动对应的汽车驾驶安全防护,包括驾驶路面状况异常安全防护、驾驶环境异常安全防护、车辆与路面障碍物距离接近降速防护和/或车辆与环境物体相对速度碰撞躲避安全防护;能够对汽车驾驶过程中的行驶路况进行驾驶路况光电探测,对汽车行驶过程中进行车身周围环境监测并进行路况环境分析识别;将路况环境分析识别信息和主动控制信号转换为驾驶行车指令,根据驾驶行车指令触发车载预警雷达启动信号
并将对接固定在车顶的车载预警雷达进行启动释放;能够增减预警雷达的照射范围、变换预警雷达照射角度闭关进行预警信息传输交互;建立安全驾驶智能策略模型对车载预警雷达的预警信息进行预警分析决策,根据预警类型启动对应的汽车驾驶安全防护;能够提供更前置的汽车驾驶安全预警和更完善的汽车驾驶安全防护。
91.在一个实施例中,所述s100包括:
92.s101,通过光电探测元件对汽车驾驶过程中的行驶路况进行驾驶路况光电探测;
93.s102,通过车身周围的环境检测对汽车行驶过程中进行车身周围环境监测;
94.s103,通过对驾驶路况光电探测和车身周围环境监测进行分析识别,获得路况环境分析识别信息。
95.上述技术方案的工作原理为,通过光电探测元件对汽车驾驶过程中的行驶路况进行驾驶路况光电探测;通过车身周围的环境检测对汽车行驶过程中进行车身周围环境监测;通过对驾驶路况光电探测和车身周围环境监测进行分析识别,获得路况环境分析识别信息;计算光电探测强干扰光源的辐照度,计算公式如下:
[0096][0097]
其中,fsdg为光电探测强干扰光源的辐照度值,k为普朗克常数值,c为真空中的光速值,a为干扰光源发光面积值,l为光源距离值,δ为光电探测光波长值,br为玻尔兹曼常数值,t表示强干扰光源的温度,exp为自然常数e的指数式;通过计算光电探测强干扰光源的辐照度,可以去除光电探测的强光干扰项,降低强光源对光电探测结果的影响,提高光电探测的准确度。
[0098]
上述技术方案的有益效果为,通过光电探测元件对汽车驾驶过程中的行驶路况进行驾驶路况光电探测;通过车身周围的环境检测对汽车行驶过程中进行车身周围环境监测;通过对驾驶路况光电探测和车身周围环境监测进行分析识别,获得路况环境分析识别信息;计算光电探测强干扰光源的辐照度,其中,fsdg为光电探测强干扰光源的辐照度值,k为普朗克常数值,c为真空中的光速值,a为干扰光源发光面积值,l为光源距离值,δ为光电探测光波长值,br为玻尔兹曼常数值,t表示强干扰光源的温度,exp为自然常数e的指数式;通过计算光电探测强干扰光源的辐照度,可以去除光电探测的强光干扰项,降低强光源对光电探测结果的影响,提高光电探测的准确度。
[0099]
在一个实施例中,所述s200包括:
[0100]
s201,接收路况环境分析识别信息,并接收主动控制信号,并将路况环境分析识别信息和主动控制信号转换为驾驶行车指令;
[0101]
s202,根据驾驶行车指令触发车载预警雷达启动信号;
[0102]
s203,根据车载预警雷达启动信号,将对接固定在车顶的车载预警雷达进行启动释放。
[0103]
上述技术方案的工作原理为,接收路况环境分析识别信息,并接收主动控制信号,并将路况环境分析识别信息和主动控制信号转换为驾驶行车指令;根据驾驶行车指令触发车载预警雷达启动信号;根据车载预警雷达启动信号,将对接固定在车顶的车载预警雷达进行启动释放。
[0104]
上述技术方案的有益效果为,接收路况环境分析识别信息,并接收主动控制信号,并将路况环境分析识别信息和主动控制信号转换为驾驶行车指令;根据驾驶行车指令触发车载预警雷达启动信号;根据车载预警雷达启动信号,将对接固定在车顶的车载预警雷达进行启动释放。
[0105]
在一个实施例中,所述s300包括:
[0106]
s301,在车载预警雷达启动释放后对预警雷达进行高度升降调节,增减预警雷达的照射范围;
[0107]
s302,在车载预警雷达高度升降调节过程中,变换预警雷达照射角度;步骤包括:通过雷达稳定平台承载激光雷达载荷,包括雷达承载缓冲垫和固定在所述雷达承载缓冲垫上的雷达承载台,所述雷达承载缓冲垫的底部具有向下凸出的立轴,所述立轴旋转带动所述激光雷达载荷方位回转,所述雷达承载台两侧具有俯仰轴,所述俯仰轴转动带动所述激光雷达载荷俯仰,所述雷达承载缓冲垫和雷达承载台的内部均形成有空腔;激光雷达载荷,用于满足不同环境条件下的目标探测功能,包括激光发射体、雷达载荷舱以及集成于所述雷达载荷舱内的激光扫描镜、激光测距单元、猫眼探测单元、激光压制单元以及综合处理单元,所述雷达载荷舱两端通过俯仰轴转动安装在所述雷达承载台内;雷达电控组,用于提供动力驱动以及对所述雷达稳定平台进行伺服控制和对所述激光雷达载荷进行图像处理,包括安装在所述雷达承载缓冲垫空腔内的驱动器和编码器、安装在所述雷达承载台一侧空腔内的伺服主控板以及安装在所述雷达承载台另一侧空腔内的跟踪消旋板;电子测角器,用于实时监测所述雷达探测系统的姿态,包括彼此独立安装的单轴陀螺和双轴陀螺,所述单轴陀螺安装在所述雷达承载台的一侧空腔内并与所述伺服主控板处于相同一侧,所述双轴陀螺安装在所述雷达载荷舱的内部;高度升降组,用于承载所述雷达稳定平台并驱动所述雷达稳定平台升降和倒伏,包括用于实现升降运动的升降模块和用于实现俯仰和方位回转运动的倒伏模块;发射激光对目标进行照射并接收反射激光,设置有用于实时感知所述高度升降组扭转量并导出惯导数据的惯导系统;利用惯导的姿态角和雷达稳定平台的方位俯仰角度,解算出激光雷达载荷视轴相对于惯导坐标系的姿态,利用雷达稳定平台做空间位置闭环将激光雷达载荷视轴稳定在空间位置;所述雷达稳定平台、雷达电控组、激光雷达载荷、电子测角器、高度升降组、以及惯导系统之间相互通信连接并最终连接到雷达控制中心;
[0108]
s303,将车载预警雷达探照信息和车载预警报警报警以及预警系统控制信息进行预警信息传输交互。
[0109]
上述技术方案的工作原理为,在车载预警雷达启动释放后对预警雷达进行高度升降调节,增减预警雷达的照射范围;在车载预警雷达高度升降调节过程中,变换预警雷达照射角度;步骤包括:通过雷达稳定平台承载激光雷达载荷,包括雷达承载缓冲垫和固定在所述雷达承载缓冲垫上的雷达承载台,所述雷达承载缓冲垫的底部具有向下凸出的立轴,所述立轴旋转带动所述激光雷达载荷方位回转,所述雷达承载台两侧具有俯仰轴,所述俯仰轴转动带动所述激光雷达载荷俯仰,所述雷达承载缓冲垫和雷达承载台的内部均形成有空腔;激光雷达载荷,用于满足不同环境条件下的目标探测功能,包括激光发射体、雷达载荷舱以及集成于所述雷达载荷舱内的激光扫描镜、激光测距单元、猫眼探测单元、激光压制单元以及综合处理单元,所述雷达载荷舱两端通过俯仰轴转动安装在所述雷达承载台内;雷
达电控组,用于提供动力驱动以及对所述雷达稳定平台进行伺服控制和对所述激光雷达载荷进行图像处理,包括安装在所述雷达承载缓冲垫空腔内的驱动器和编码器、安装在所述雷达承载台一侧空腔内的伺服主控板以及安装在所述雷达承载台另一侧空腔内的跟踪消旋板;电子测角器,用于实时监测所述雷达探测系统的姿态,包括彼此独立安装的单轴陀螺和双轴陀螺,所述单轴陀螺安装在所述雷达承载台的一侧空腔内并与所述伺服主控板处于相同一侧,所述双轴陀螺安装在所述雷达载荷舱的内部;高度升降组,用于承载所述雷达稳定平台并驱动所述雷达稳定平台升降和倒伏,包括用于实现升降运动的升降模块和用于实现俯仰和方位回转运动的倒伏模块;发射激光对目标进行照射并接收反射激光,设置有用于实时感知所述高度升降组扭转量并导出惯导数据的惯导系统;利用惯导的姿态角和雷达稳定平台的方位俯仰角度,解算出激光雷达载荷视轴相对于惯导坐标系的姿态,利用雷达稳定平台做空间位置闭环将激光雷达载荷视轴稳定在空间位置;所述雷达稳定平台、雷达电控组、激光雷达载荷、电子测角器、高度升降组、以及惯导系统之间相互通信连接并最终连接到雷达控制中心;将车载预警雷达探照信息和车载预警报警报警以及预警系统控制信息进行预警信息传输交互。
[0110]
上述技术方案的有益效果为,在车载预警雷达启动释放后对预警雷达进行高度升降调节,增减预警雷达的照射范围;在车载预警雷达高度升降调节过程中,变换预警雷达照射角度;步骤包括:通过雷达稳定平台承载激光雷达载荷,包括雷达承载缓冲垫和固定在所述雷达承载缓冲垫上的雷达承载台,所述雷达承载缓冲垫的底部具有向下凸出的立轴,所述立轴旋转带动所述激光雷达载荷方位回转,所述雷达承载台两侧具有俯仰轴,所述俯仰轴转动带动所述激光雷达载荷俯仰,所述雷达承载缓冲垫和雷达承载台的内部均形成有空腔;激光雷达载荷,用于满足不同环境条件下的目标探测功能,包括激光发射体、雷达载荷舱以及集成于所述雷达载荷舱内的激光扫描镜、激光测距单元、猫眼探测单元、激光压制单元以及综合处理单元,所述雷达载荷舱两端通过俯仰轴转动安装在所述雷达承载台内;雷达电控组,用于提供动力驱动以及对所述雷达稳定平台进行伺服控制和对所述激光雷达载荷进行图像处理,包括安装在所述雷达承载缓冲垫空腔内的驱动器和编码器、安装在所述雷达承载台一侧空腔内的伺服主控板以及安装在所述雷达承载台另一侧空腔内的跟踪消旋板;电子测角器,用于实时监测所述雷达探测系统的姿态,包括彼此独立安装的单轴陀螺和双轴陀螺,所述单轴陀螺安装在所述雷达承载台的一侧空腔内并与所述伺服主控板处于相同一侧,所述双轴陀螺安装在所述雷达载荷舱的内部;高度升降组,用于承载所述雷达稳定平台并驱动所述雷达稳定平台升降和倒伏,包括用于实现升降运动的升降模块和用于实现俯仰和方位回转运动的倒伏模块;发射激光对目标进行照射并接收反射激光,设置有用于实时感知所述高度升降组扭转量并导出惯导数据的惯导系统;利用惯导的姿态角和雷达稳定平台的方位俯仰角度,解算出激光雷达载荷视轴相对于惯导坐标系的姿态,利用雷达稳定平台做空间位置闭环将激光雷达载荷视轴稳定在空间位置;所述雷达稳定平台、雷达电控组、激光雷达载荷、电子测角器、高度升降组、以及惯导系统之间相互通信连接并最终连接到雷达控制中心;将车载预警雷达探照信息和车载预警报警报警以及预警系统控制信息进行预警信息传输交互。
[0111]
在一个实施例中,所述s400包括:
[0112]
s401,根据安全驾驶规定和安全驾驶规则建立安全驾驶智能策略模型;
[0113]
s402,通过安全驾驶智能策略模型对车载预警雷达的预警信息进行预警分析决策;包括安全驾驶规则信息中心、安全驾驶智能策略模型分析模块、安全驾驶决策模块、安全驾驶云平台以及汽车驾驶端;所述的安全驾驶规则信息中心包括历史驾驶规范信息分区、实时驾驶规范信息分区、基础道路信息分区、应急预案信息分区、安全距离运算模型信息分区以及预警信息分区;所述的安全驾驶智能策略模型分析模块对实时驾驶规范信息分区和历史驾驶规范信息分区中的驾驶信息数据进行预处理后,对时间序列数据进行分段线性表示达到维压缩的目的,进而将实时驾驶规范数据与历史驾驶规范资料数据进行相似匹配,并根据相似匹配结果做出驾驶过程预警,如果实时驾驶规范数据达到预警阈值,安全驾驶智能策略模型分析模块将实时驾驶规范数据以及相匹配的历史驾驶规范资料数据存储到预警信息分区中;所述的安全驾驶决策模块是基于道路模型信息展示安全驾驶决策信息,包括调用预警资料数据、应急预案资料数据对驾驶过程进行模拟展示以及应急预案生成,调用实时驾驶规范的事故数据进行展示,安全驾驶决策模块的模拟数据与应急预案资料数据也存储到预警信息分区中,并通过部署的安全驾驶云平台来将地图服务和数据展示到汽车驾驶端的汽车驾驶端;所述的历史驾驶规范信息分区包括存储历史事故名称、事故实测和事故预报数据、驾驶过程等级数据;所述的实时驾驶规范信息分区定时接收远程数据采集系统传输的实时驾驶规范数据,设置信息中心文件自动扩展与表收缩以适应数据的实时录入;所述的基础道路信息分区存储基础道路信息数据,包括道路和道路高度方向的空间数据、属性数据以及影像数据;所述的应急预案信息分区存储历史事故预案和设计预案,历史事故预案和设计预案;所述的安全距离运算模型信息分区存储用于选取驾驶过程指标、事故预判模拟、驾驶过程等级划分的模型以及其中涉及的模型智能分析;所述的预警信息分区存储安全驾驶智能策略模型分析模块得到的匹配结果数据、预判模拟评估数据、驾驶过程等级划分数据,预警信息分区中的数据在预警解除后存储到应急预案信息分区中;所述的安全驾驶智能策略模型分析模块主要是对数据进行预处理后,对时间序列数据进行分段线性表示达到维压缩的目的,进而与历史驾驶规范资料数据进行相似匹配,并根据相似匹配结果做出驾驶过程预警;所述的安全驾驶决策模块基于道路模型信息展示安全驾驶决策信息,并通过部署的安全驾驶云平台来展示到汽车驾驶端;
[0114]
s403,根据预警分析决策发出预警报警,并根据预警类型启动对应的汽车驾驶安全防护。
[0115]
上述技术方案的工作原理为,根据安全驾驶规定和安全驾驶规则建立安全驾驶智能策略模型;通过安全驾驶智能策略模型对车载预警雷达的预警信息进行预警分析决策;包括安全驾驶规则信息中心、安全驾驶智能策略模型分析模块、安全驾驶决策模块、安全驾驶云平台以及汽车驾驶端;所述的安全驾驶规则信息中心包括历史驾驶规范信息分区、实时驾驶规范信息分区、基础道路信息分区、应急预案信息分区、安全距离运算模型信息分区以及预警信息分区;所述的安全驾驶智能策略模型分析模块对实时驾驶规范信息分区和历史驾驶规范信息分区中的驾驶信息数据进行预处理后,对时间序列数据进行分段线性表示达到维压缩的目的,进而将实时驾驶规范数据与历史驾驶规范资料数据进行相似匹配,并根据相似匹配结果做出驾驶过程预警,如果实时驾驶规范数据达到预警阈值,安全驾驶智能策略模型分析模块将实时驾驶规范数据以及相匹配的历史驾驶规范资料数据存储到预警信息分区中;所述的安全驾驶决策模块是基于道路模型信息展示安全驾驶决策信息,包
括调用预警资料数据、应急预案资料数据对驾驶过程进行模拟展示以及应急预案生成,调用实时驾驶规范的事故数据进行展示,安全驾驶决策模块的模拟数据与应急预案资料数据也存储到预警信息分区中,并通过部署的安全驾驶云平台来将地图服务和数据展示到汽车驾驶端的汽车驾驶端;所述的历史驾驶规范信息分区包括存储历史事故名称、事故实测和事故预报数据、驾驶过程等级数据;所述的实时驾驶规范信息分区定时接收远程数据采集系统传输的实时驾驶规范数据,设置信息中心文件自动扩展与表收缩以适应数据的实时录入;所述的基础道路信息分区存储基础道路信息数据,包括道路和道路高度方向的空间数据、属性数据以及影像数据;所述的应急预案信息分区存储历史事故预案和设计预案,历史事故预案和设计预案;所述的安全距离运算模型信息分区存储用于选取驾驶过程指标、事故预判模拟、驾驶过程等级划分的模型以及其中涉及的模型智能分析;所述的预警信息分区存储安全驾驶智能策略模型分析模块得到的匹配结果数据、预判模拟评估数据、驾驶过程等级划分数据,预警信息分区中的数据在预警解除后存储到应急预案信息分区中;所述的安全驾驶智能策略模型分析模块主要是对数据进行预处理后,对时间序列数据进行分段线性表示达到维压缩的目的,进而与历史驾驶规范资料数据进行相似匹配,并根据相似匹配结果做出驾驶过程预警;所述的安全驾驶决策模块基于道路模型信息展示安全驾驶决策信息,并通过部署的安全驾驶云平台来展示到汽车驾驶端;根据预警分析决策发出预警报警,并根据预警类型启动对应的汽车驾驶安全防护。
[0116]
上述技术方案的有益效果为,根据安全驾驶规定和安全驾驶规则建立安全驾驶智能策略模型;通过安全驾驶智能策略模型对车载预警雷达的预警信息进行预警分析决策;包括安全驾驶规则信息中心、安全驾驶智能策略模型分析模块、安全驾驶决策模块、安全驾驶云平台以及汽车驾驶端;所述的安全驾驶规则信息中心包括历史驾驶规范信息分区、实时驾驶规范信息分区、基础道路信息分区、应急预案信息分区、安全距离运算模型信息分区以及预警信息分区;所述的安全驾驶智能策略模型分析模块对实时驾驶规范信息分区和历史驾驶规范信息分区中的驾驶信息数据进行预处理后,对时间序列数据进行分段线性表示达到维压缩的目的,进而将实时驾驶规范数据与历史驾驶规范资料数据进行相似匹配,并根据相似匹配结果做出驾驶过程预警,如果实时驾驶规范数据达到预警阈值,安全驾驶智能策略模型分析模块将实时驾驶规范数据以及相匹配的历史驾驶规范资料数据存储到预警信息分区中;所述的安全驾驶决策模块是基于道路模型信息展示安全驾驶决策信息,包括调用预警资料数据、应急预案资料数据对驾驶过程进行模拟展示以及应急预案生成,调用实时驾驶规范的事故数据进行展示,安全驾驶决策模块的模拟数据与应急预案资料数据也存储到预警信息分区中,并通过部署的安全驾驶云平台来将地图服务和数据展示到汽车驾驶端的汽车驾驶端;所述的历史驾驶规范信息分区包括存储历史事故名称、事故实测和事故预报数据、驾驶过程等级数据;所述的实时驾驶规范信息分区定时接收远程数据采集系统传输的实时驾驶规范数据,设置信息中心文件自动扩展与表收缩以适应数据的实时录入;所述的基础道路信息分区存储基础道路信息数据,包括道路和道路高度方向的空间数据、属性数据以及影像数据;所述的应急预案信息分区存储历史事故预案和设计预案,历史事故预案和设计预案;所述的安全距离运算模型信息分区存储用于选取驾驶过程指标、事故预判模拟、驾驶过程等级划分的模型以及其中涉及的模型智能分析;所述的预警信息分区存储安全驾驶智能策略模型分析模块得到的匹配结果数据、预判模拟评估数据、驾驶过
程等级划分数据,预警信息分区中的数据在预警解除后存储到应急预案信息分区中;所述的安全驾驶智能策略模型分析模块主要是对数据进行预处理后,对时间序列数据进行分段线性表示达到维压缩的目的,进而与历史驾驶规范资料数据进行相似匹配,并根据相似匹配结果做出驾驶过程预警;所述的安全驾驶决策模块基于道路模型信息展示安全驾驶决策信息,并通过部署的安全驾驶云平台来展示到汽车驾驶端;根据预警分析决策发出预警报警,并根据预警类型启动对应的汽车驾驶安全防护;能够提供更前置的汽车驾驶安全预警和更完善的汽车驾驶安全防护。
[0117]
尽管本发明的实施方案已公开如上,但其并不仅仅限于说明书和实施方式中所列运用,它完全可以被适用于各种适合本发明的领域,对于熟悉本领域的人员而言,可容易地实现另外的修改,因此在不背离权利要求及等同范围所限定的一般概念下,本发明并不限于特定的细节与这里示出与描述的图例。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1