基于域控制器的停车位检测方法、电子设备及存储介质与流程
1.本发明涉及自动泊车技术领域,尤其涉及一种基于域控制器的停车位检测方法、电子设备及存储介质。
背景技术:
2.自动泊车是不用人工干预、自动停车入位的系统,降低驾驶员的驾驶负担。由于现实世界的环境极为复杂,现实世界中的光照、天气、地面污渍都会干扰机器视觉对停车位的识别。而在车载嵌入式平台中,由于成本和功率等原因的限制,往往采用低算力芯片,低算力芯片无法在保证识别精度的情况下提供高频次识别。
3.目前,各车载嵌入式平台的硬件厂商通常是增设额外的低成本视觉识别芯片,而这类低成本视觉识别芯片并没有处理浮点运算的核心,若需在这类芯片上运行深度学习模型,则需要对深度学习模型进行处理,量化深度学习模型,在尽可能保证模型运算精度的前提下将模型内部的浮点运算转换成整数运算,以此节省算力。然而,量化后的深度学习模型的误差难以控制,降低了自动泊车系统的泊入率。
技术实现要素:
4.为了克服现有技术的不足,本发明的目的在于提供一种基于域控制器的停车位检测方法、电子设备及存储介质,以解决现有的视觉识别泊车系统无法兼顾高精度视觉识别及高频次神经网络模型运算的问题。
5.本发明的目的采用如下技术方案实现:
6.一种基于域控制器的停车位检测方法,包括以下步骤:
7.初检步骤:量化处理模型对车辆的全景影像系统采集的图像数据进行停车位检测得到停车位初检坐标,并将所述停车位初检坐标映射至绝对坐标系;
8.判断步骤:在所述绝对坐标系中,判断在目标时刻下车辆坐标与所述停车位初检坐标之间的参考距离,当所述参考距离小于预设值时,将所述目标时刻的所述图像数据输入神经网络模型;
9.精检步骤:使用所述神经网络模型在以所述停车位初检坐标为中心的预设范围内对所述图像数据进行停车位检测,以得到停车位精检坐标。
10.在某些可选的实施例中,在所述初检步骤之前,还包括:
11.同步步骤:对车辆姿态数据的时间戳以及所述图像数据的时间戳进行同步;
12.车辆状态获取步骤:根据同一时刻下的所述图像数据和车辆姿态数据得到所述车辆在绝对坐标系中的车辆坐标及车辆航向角;
13.在所述初检步骤中,还包括:量化处理模型对车辆的全景影像系统采集的图像数据进行停车位检测得到参考位置,通过所述车辆坐标、车辆航向角和参考位置计算得到所述停车位初检坐标。
14.在某些可选的实施例中,在所述判断步骤和精检步骤之间,还包括:图像处理步
骤:在所述停车位初检坐标为中心的预设范围内的所述图像数据中映射虚拟停车区域,提取所述图像数据中所观察到的停车框与所述虚拟停车区域相重叠的重叠图像;
15.所述精检步骤还包括:使用所述神经网络模型对所述重叠图像进行停车位检测。
16.在某些可选的实施例中,所述图像处理步骤还包括:对所述重叠图像进行扩边;
17.所述精检步骤还包括:使用所述神经网络模型对扩边后的所述重叠图像进行停车位检测。
18.在某些可选的实施例中,所述图像处理步骤还包括:对扩边后的所述重叠图像进行掩膜处理以得到掩膜图像,对所述掩膜图像之外的区域进行置黑处理;
19.所述精检步骤还包括:使用所述神经网络模型对所述掩膜图像进行停车位检测。
20.在某些可选的实施例中,所述车辆姿态数据包括轮速脉冲信号和方向盘转角信号;
21.所述车辆状态获取步骤还包括:
22.将所述方向盘转角信号通过多项式拟合得到前轮转角信息,通过所述轮速脉冲信号计算得到车轮速度信息,根据所述前轮转角信息和车轮速度信息得到所述车辆航向角。
23.在某些可选的实施例中,所述车辆状态获取步骤还包括:
24.建立车辆运动模型,将所述前轮转角信息和车轮速度信息代入所述车辆运动模型,得到车辆的角速度和线速度;通过所述角速度和线速度计算得到所述车辆航向角。
25.在某些可选的实施例中,所述车辆状态获取步骤还包括:
26.对所述角速度和线速度进行卡尔曼滤波后,计算得到所述车辆航向角。
27.为了解决相同的技术问题,本发明还提供了一种电子设备,包括存储器和处理器;
28.所述存储器用于存储可执行的计算机指令;
29.所述处理器用于执行所述计算机指令时实现上述方法的步骤。
30.为了解决相同的技术问题,本发明还提供了一种计算机可读存储介质,其存储有计算机指令,所述计算机指令被处理器执行时实现上述方法的步骤。
31.相比现有技术,本发明的有益效果在于:
32.采用量化处理模型检测得到停车位初检坐标,当车辆距离停车位初检坐标近于预设值时,使用神经网络模型对图像数据进行停车位识别得到停车位精检坐标,以此兼顾高精度视觉识别及高频次神经网络模型运算。
附图说明
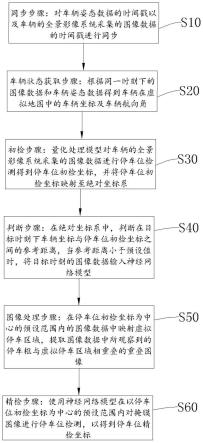
33.图1为发明的基于域控制器的停车位检测方法的步骤流程示意图;
具体实施方式
34.为了便于理解本发明,下面将参照相关附图对本发明进行更全面的描述。附图中给出了本发明的较佳的实施例。但是,本发明可以用许多不同的形式来实现,并不限于本文所描述的实施例。相反地,提供这些实施例的目的是使对本发明的公开内容的理解更加透彻全面。
35.需要说明的是,当元件被称为“固定于”另一个元件,它可以直接在另一个元件上或者也可以存在居中的元件。当一个元件被认为是“连接”另一个元件,它可以是直接连接
到另一个元件或者可能同时存在居中元件。本文所使用的术语“垂直的”、“水平的”、“左”、“右”以及类似的表述只是为了说明的目的。
36.除非另有定义,本文所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。本文中在本发明的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本发明。本文所使用的术语“及/或”包括一个或多个相关的所列项目的任意的和所有的组合。
37.实施例一
38.结合图1所示,示意性地显示了本发明的一种基于域控制器的停车位检测方法,包括以下步骤:
39.步骤s10、同步步骤:对车辆姿态数据的时间戳以及车辆的全景影像系统采集的图像数据的时间戳进行同步。其中,车辆姿态数据包括轮速脉冲信号和方向盘转角信号。具体地,采集车辆的轮速脉冲数据及其时间戳以及方向盘转角数据及其时间戳,根据轮速脉冲数据及其时间戳以及方向盘转角数据及其时间戳计算得到车辆姿态。
40.采集轮速脉冲数据及其时间戳以及方向盘转角数据及其时间戳,可在同一时刻下计算出当前的车辆姿态。例如,在需要计算04:37:26这一时刻的车辆姿态时,则要调取在04:37:26这一时刻的轮速脉冲数据及方向盘转角数据,根据轮速脉冲数据可计算得到车辆每个车轮的转速,根据方向盘转角数据可计算得到车辆的转向情况,由每个车轮的转速及转向情况即可计算得到在04:37:26这一时刻的车辆姿态。
41.步骤s20、车辆状态获取步骤:根据同一时刻下的图像数据和车辆姿态数据得到车辆在虚拟地图中的车辆坐标及车辆航向角。基于步骤s10中的时间戳,以根据同一时刻的图像数据和车辆姿态数据得到车辆坐标及航向角。
42.其中,将方向盘转角信号通过多项式拟合得到前轮转角信息,通过轮速脉冲信号计算得到车轮速度信息;建立车辆运动模型,将前轮转角信息和车轮速度信息代入车辆运动模型,得到车辆的角速度和线速度;对角速度和线速度进行卡尔曼滤波后,计算得到车辆航向角。
43.步骤s30、初检步骤:量化处理模型对车辆的全景影像系统采集的图像数据进行停车位检测得到停车位初检坐标,并将停车位初检坐标映射至绝对坐标系;
44.具体为:量化处理模型对车辆的全景影像系统采集的图像数据进行停车位检测得到参考位置,通过所述车辆坐标、车辆航向角和参考位置计算得到停车位初检坐标。当获知了车辆坐标及车辆航向角,即可得到车辆在虚拟地图中的位置及姿态,再结合参考位置,能得到停车位在虚拟地图中的停车位初检坐标。
45.步骤s40、判断步骤:在绝对坐标系中,判断在目标时刻下车辆坐标与停车位初检坐标之间的参考距离,当参考距离小于预设值(如预设值为2米)时,将目标时刻的图像数据输入神经网络模型。即当车辆距离停车位较近时,开始使用神经网络模型对图像数据进行运算。
46.步骤s50、图像处理步骤:在停车位初检坐标为中心的预设范围内的图像数据中映射虚拟停车区域,提取图像数据中所观察到的停车框与虚拟停车区域相重叠的重叠图像,对重叠图像进行扩边,对扩边后的重叠图像进行掩膜处理以得到掩膜图像,对掩膜图像之外的区域进行置黑处理,以使得掩膜图像适于神经网络模型的视觉识别。
47.步骤s60、精检步骤:使用神经网络模型在以停车位初检坐标为中心的预设范围内对掩膜图像进行停车位检测,以得到停车位精检坐标,以此兼顾高精度视觉识别及高频次神经网络模型运算。掩膜的设置使得神经网络模型能够专注于对掩膜图像进行停车框识别。
48.实施例二
49.为了解决相同的技术问题,本发明还提供了一种电子设备,包括存储器和处理器,存储器用于存储可执行的计算机指令,处理器用于执行计算机指令时实现上述方法的步骤。
50.实施例三
51.为了解决相同的技术问题,本发明还提供了一种计算机可读存储介质,其存储有计算机指令,计算机指令被处理器执行时实现上述方法的步骤。
52.相比现有技术,本发明的有益效果在于:
53.采用量化处理模型检测得到停车位初检坐标,当车辆距离停车位初检坐标近于预设值时,使用神经网络模型对图像数据进行停车位识别得到停车位精检坐标,以此兼顾高精度视觉识别及高频次神经网络模型运算。
54.以上所述仅为本发明的实施例,并非因此限制本发明的专利范围,凡是利用本发明说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其他相关的技术领域,均同理包括在本发明的专利保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1