无人机跑道冲突自主预警系统的制作方法
1.本技术涉及固定翼无人机跑道控制领域,具体涉及一种无人机跑道冲突自主预警系统。
背景技术:
2.未来五年内,支线物流无人机将成为全球竞争焦点,这也是目前企业正在积极布局和争夺的重要领土之一。未来通用机场作为无人机支线货运服务站点,不仅契合大型固定翼无人机起降需求和服务保障需求,同时契合通用机场运营多样化盈利创新需求。但随之而来的无人机与有人机在通用机场的混合运行,将面临诸多安全运行难题。鉴于大型固定翼无人机的远程控制特点,其对机场场面交通态势感知能力较弱,高速起降场景下对跑道冲突即时准确的预警是混合运行的关键难点之一。
3.大型无人机与有人机在机场的混合运行,首先应建立在监视手段统一的基础上,通过通信手段的融合,实现通信一张网、融合监视、协同管控。ads-b(automatic dependent surveillance-broadcast,中文是广播式自动相关监视)是民航运输飞机与通航飞机的重要监视手段,因此大型无人机具备ads-b广播能力亦是融合监视的必然趋势。随着ads-b机载设备性能要求的规范,加之日渐成熟的北斗系统避免了由于gps失效带来的安全隐患,基于ads-b in(航空器具备接收周围其他航空器ads-b数据的能力)技术,无人机可以自动精确感知机场场面交通态势,进而使得无人机对跑道冲突的自主预警成为可能。
技术实现要素:
4.针对上述技术问题,本发明实施例提供一种无人机跑道冲突自主预警系统,用于至少解决上述技术问题之一。
5.本发明实施例采用的技术方案为:
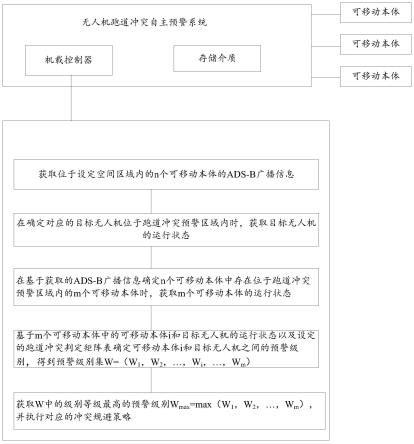
6.本发明实施例提供一种无人机跑道冲突自主预警系统,部署在目标无人机上,所述系统包括:机载控制器和存储有计算机程序的存储介质;
7.所述机载控制器用于执行计算机程序,执行如下步骤:
8.s10,获取位于设定空间区域内的n个可移动本体的ads-b广播信息,n≥1;
9.s20,在确定对应的目标无人机位于跑道冲突预警区域内时,获取目标无人机的运行状态;
10.s30,在基于获取的ads-b广播信息确定n个可移动本体中存在位于跑道冲突预警区域内的m个可移动本体时,获取m个可移动本体的运行状态;m的取值为1到n;s40,基于m个可移动本体中的可移动本体i和目标无人机的运行状态以及设定的跑道冲突判定矩阵表确定可移动本体i和目标无人机之间的预警级别wi,得到预警级别集w=(w1,w2,
…
,wi,
…
,wm),其中,wi∈(d1,d2,
…
,d
t
),dj为设定的第j个预警级别,i的取值为1到m,t为设定的预警级别的数量;
11.所述设定的跑道冲突判定矩阵表中的第p行包括(c
p1
,c
p2
,
…
,c
pq
),c
pk
为基于可移
动本体在运行状态p和目标无人机在运行状态k时确定的预警级别,c
pk
∈(d1,d2,
…
,d
t
);p和k的取值为1到q,q为运行状态的数量;
12.s50,获取w中的级别等级最高的预警级别w
max
=max(w1,w2,
…
,wm),并执行对应的冲突规避策略。
13.本发明实施例提供的无人机跑道冲突自主预警系统,能够实现无人机可以自动精确感知机场场面交通态势,进而能够实现无人机对跑道冲突的自主预警。
附图说明
14.为了更清楚地说明本技术实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
15.图1为通用机场无人机与有人机混合运行通信示意图;
16.图2为本发明实施例提供的无人机跑道冲突自主预警系统的框架图;
17.图3为本发明实施例提供的无人机跑道冲突自主预警系统的工作原理图;
18.图4为运行状态示意图。
具体实施方式
19.下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本技术一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
20.本发明实施例提供一种无人机跑道冲突自主预警系统,部署在目标无人机上,用于使得无人机实现跑道冲突自主预警。
21.在本发明实施例中,无人机为大型固定翼无人机。大型固定翼无人机的概念可为现有技术。由于大型固定翼无人机运行是受控于无人机远程控制台,机场现有地面保障调度是建立在本地通信网络上的,如果不将无人机通信控制链路整合到机场地面保障调度网络中,会缺失机场管控中心、远程管控台、无人机、有人机、地面保障资源的一张网通信,多类型活动主体对机场场面交通态势感知的不一致性将会造成安全隐患,同时降低混合运行场景下的运行效率,因此大型固定翼无人机实现跑道冲突自主预警的前提是形成通用机场混合运行通信一张网,如图1所示。图1中,无人机、有人机、作业保障车辆通过ads-b链路广播自身位置、身份、状态等信息。无人机亦通过ads-b in技术接收其周围活动目标广播的ads-b信息,从而获取潜在冲突对象的精确位置、意图等信息。最终通过融合通用机场现有调度网络、大型固定翼无人机地空通信控制网络、基于5g的协同控制网、ads-b链路,形成通用机场混合运行通信一张网。
22.大型固定翼无人机要具备跑道冲突自主预警能力,需要加装新型机载模块,新型机载模块主要包括四种能力,即ads-b广播能力、ads-b接收能力、跑道冲突自主预警能力、冲突规避能力,如图2所示。新型机载模块通过通信一张网,将处理后的无人机本机ads-b信息、周围存在冲突威胁的航空器/车辆信息、自主判别的跑道冲突预警信息、冲突规避动作
发送给无人远程控制台,无人机远程控制台增强了对机场场面交通态势感知的实时性、准确性、一致性。即,本发明实施例提供的无人机跑道冲突自主预警系统部署有新型机载模块。
23.进一步地,所述系统可包括:机载控制器和存储有计算机程序的存储介质。新型机载模块可部署在机载控制器上。
24.进一步地,如图3所示(同时参考图2),所述机载控制器用于执行计算机程序,执行如下步骤:
25.s10,获取位于设定空间区域内的n个可移动本体的ads-b广播信息,n≥1。
26.在本发明实施例中,设定空间区域可基于机载控制器能够接收到的ads-b广播信息的范围确定。n个可移动本体为除目标无人机之外的可移动本体,包括航空器和车辆等。
27.机载控制器可实时获取n个可移动本体的ads-b广播信息并存储在存储器中。
28.s20,在确定对应的目标无人机位于跑道冲突预警区域内时,获取目标无人机的运行状态。在本发明实施例中,跑道冲突预警区域是指:
29.(1)距离跑道中心线1500英尺以内,且
30.(2)距离跑道入口3海里内,且高出机场标高1000英尺内。
31.无人机进入跑道冲突预警区域后,自动激活跑道冲突自主预警功能。从而避免机载设备不必要的运算压力。
32.在本发明实施例中,确定对应的目标无人机是否位于跑道冲突预警区域内可属于现有技术。机载控制器可每隔设定周期判断目标无人机是否位于跑道冲突预警区域内。在本发明实施例中,如图4所示,所述运行状态可包括如下六种运行状态:
33.状态1:在滑行道上向hold-line滑行或停在hold-line上;
34.状态2:进入/穿过跑道(不对齐跑道);
35.状态3:起飞;
36.状态4:距离跑道入口小于3海里;
37.状态5:着陆后,在跑道上跑滑;
38.状态6:以与跑道平行的方式(即对齐跑道)沿着跑道停止或滑行。
39.在本发明实施例中,可基于目标无人机上设置的传感器获取的传感数据确定目标无人机的运行状态,具体确定方式可为本领域的现有技术。
40.s30,在基于获取的ads-b广播信息确定n个可移动本体中存在位于跑道冲突预警区域内的m个可移动本体时,获取m个可移动本体的运行状态;m的取值为1到n。
41.在本发明实施例中,基于获取的ads-b广播信息判断n个可移动本体中是否存在位于跑道冲突预警区域内的可移动本体以及确定位于跑道冲突预警区域内的m个可移动本体的运行状态可为现有技术。
42.在实际情况下,m的取值为1或者2,优选m=1。
43.s40,基于m个可移动本体中的可移动本体i和目标无人机的运行状态以及设定的跑道冲突判定矩阵表确定可移动本体i和目标无人机之间的预警级别wi,得到预警级别集w=(w1,w2,
…
,wi,
…
,wm),其中,wi∈(d1,d2,
…
,d
t
),dj为设定的第j个预警级别,i的取值为1到m,t为设定的预警级别的数量。
44.在本发明实施例中,t=5,即可包括5个预警级别。在一个示意性实施例中,d1,d2,
d3、d4和d5分别为级别等级依次递增的无冲突风险、交通提醒、跑道提醒、警示和告警。
45.在本发明实施例中,无冲突风险、交通提醒、跑道提醒、警示和告警的定义分别为:
46.无冲突风险(no conflict risk,ncr)是指在跑道冲突预警区域,可移动本体(以下有时简称它机)与目标无人机(以下有时简称本机)不会发生冲突风险。
47.交通提醒(traffic indication,ti)是指在跑道冲突预警区域,它机与本机不会发生立即的冲突风险,但冲突风险快速递增。跑道提醒(runway status indication,rsi)是指在跑道冲突预警区域,本机正在跑道上等待起飞或正在进近准备着陆,它机与本机存在发生立即冲突的风险,但还未达到某个阈值。
48.警示(caution,c)是指在跑道冲突预警区域,它机与本机的冲突风险级别已经上升到需要无人机执行冲突规避动作,远程控制台在时间范围内可以依据无人机发送的存在冲突威胁的航空器/车辆信息、冲突预警信息和规避动作,对冲突规避方案进行调整。
49.告警(warning,w)是指在跑道冲突预警区域,它机与本机的冲突风险级别已经上升到需要无人机立即执行冲突规避动作。
50.进一步地,在本发明实施例中,所述设定的跑道冲突判定矩阵表中的第p行包括(c
p1
,c
p2
,
…
,c
pq
),c
pk
为可移动本体在运行状态j和目标无人机在运行状态k时对应的预警级别,c
pk
∈(d1,d2,
…
,d
t
);p和k的取值为1到q,q为运行状态的数量。在本发明一实施例中,q=6。
51.进一步地,在本发明实施例中,设定的跑道冲突判定矩阵表的第1行中的预警级别满足:
52.c
11
=d1;c
12
=c
13
=c
14
=c
15
=c
16
=d2。
53.也就是说:
54.(1)如果它机是状态1,本机是状态1,则对应的预警级别c
11
为d1即无冲突风险。
55.(2)如果它机是状态1,本机是状态2至状态6中的任一状态,则对应的预警级别为d2即交通提醒。
56.进一步地,设定的跑道冲突判定矩阵表的第2行中的预警级别满足:
57.c
21
=c
22
=d2;c
23
∈{d1,d5};c
24
∈{d1,d2,d3,d4,d5};c
25
∈{d1,d5};c
26
∈{d1,d3};
58.其中,在可移动本体处于状态2和目标无人机处于状态3的情况下:
59.如果可移动本体在时间顺序上位于处于跑道上的目标无人机的前面,则c
23
=d5。
60.如果可移动本体在时间顺序上位于处于跑道上的目标无人机的后面,则c
23
=d1。
61.在可移动本体处于状态2和目标无人机处于状态4的情况下:
62.如果可移动本体在时间顺序上位于处于跑道上的目标无人机的前面,如果目标无人机或可移动本体与跑道入口的距离大于第一设定距离l1,则c
24
=d2。在本发明示意性实施例中,l1=2nm。
63.如果可移动本体在时间顺序上位于处于跑道上的目标无人机的前面,如果目标无人机或可移动本体与跑道入口的距离小于第一设定距离l1但到达跑道入口的时间大于第一设定时间t1,则c
24
=d3。在本发明实施例中,优选,t1=35s。
64.如果可移动本体在时间顺序上位于处于跑道上的目标无人机的前面,如果目标无人机或可移动本体到达跑道入口的时间小于第一设定时间t1,则c
24
=d4。
65.如果可移动本体在时间顺序上位于处于跑道上的目标无人机的前面,如果目标无
人机或可移动本体到达跑道入口的时间小于第二设定时间t2,则c
24
=d5;t2<t1;在本发明实施例中,t2=15s。
66.如果可移动本体在时间顺序上位于处于跑道上的目标无人机的后面,则c
24
=d1;
67.在可移动本体处于状态2和目标无人机处于状态5的情况下:
68.如果可移动本体在时间顺序上位于处于跑道上的目标无人机的前面,则c
25
=d5。
69.如果可移动本体在时间顺序上位于处于跑道上的目标无人机的后面,则c
25
=d1。
70.在可移动本体处于状态2和目标无人机处于状态6的情况下:
71.如果可移动本体在时间顺序上位于处于跑道上的目标无人机的前面,则c
26
=d3。
72.如果可移动本体在时间顺序上位于处于跑道上的目标无人机的后面,则c
26
=d1。
73.进一步地,设定的跑道冲突判定矩阵表的第3行中的预警级别满足:
74.c
31
∈{d1,d3},c
32
∈{d1,d5},c
33
∈{d2,d5},c
34
∈{d2,d3,d4,d5},c
35
∈{d1,d5},c
36
∈{d3,d5}。
75.其中,在可移动本体处于状态3和目标无人机处于状态1的情况下:
76.如果可移动本体和目标无人机处于交汇状态,则c
31
=d3。
77.如果可移动本体和目标无人机不处于交汇状态,则c
31
=d1。
78.在本发明实施例中,交汇状态是指本机与它机指向跑道上的同一点,且本机与它机之间的距离逐渐减小。
79.在可移动本体处于状态3和目标无人机处于状态2的情况下:
80.如果可移动本体和目标无人机处于交汇状态,则c
32
=d5。
81.如果可移动本体和目标无人机不处于交汇状态,则c
32
=d1。
82.在可移动本体处于状态3和目标无人机处于状态3的情况下:
83.如果可移动本体在时间顺序上位于处于跑道上的目标无人机的前面,c
33
=d5。
84.如果可移动本体在时间顺序上位于处于跑道上的目标无人机的后面,c
33
=d2。
85.如果可移动本体在时间顺序上位于处于跑道上的目标无人机的前面并且与目标无人机处于交汇状态,则c
33
=d5。
86.在可移动本体处于状态3和目标无人机处于状态4的情况下:
87.如果可移动本体在时间顺序上位于处于跑道上的目标无人机的前面,如果目标无人机或可移动本体与跑道入口的距离大于第一设定距离l1,则c
34
=d2。
88.如果可移动本体在时间顺序上位于处于跑道上的目标无人机的前面,如果目标无人机或可移动本体与跑道入口的距离小于第一设定距离l1但到达跑道入口的时间大于第一设定时间t1,则c
34
=d3。
89.如果可移动本体在时间顺序上位于处于跑道上的目标无人机的前面,如果目标无人机或可移动本体到达跑道入口的时间小于第一设定时间t1,则c
34
=d4。
90.如果可移动本体在时间顺序上位于处于跑道上的目标无人机的前面,并且如果目标无人机或可移动本体到达跑道入口的时间小于第二设定时间t2,则c
34
=d5。
91.如果可移动本体在时间顺序上位于处于跑道上的目标无人机的后面,则c
34
=d5。
92.如果可移动本体在时间顺序上位于处于跑道上的目标无人机的前面并且与目标无人机处于交汇状态,如果目标无人机或可移动本体与跑道入口的距离大于第一设定距离l1,则c
34
=d2。
93.如果可移动本体在时间顺序上位于处于跑道上的目标无人机的前面并且与目标无人机处于交汇状态,如果目标无人机或可移动本体与跑道入口的距离小于第一设定距离l1但到达跑道入口的时间大于第一设定时间t1,则c
34
=d3。
94.如果可移动本体在时间顺序上位于处于跑道上的目标无人机的前面并且与目标无人机处于交汇状态,如果目标无人机或可移动本体到达跑道入口的时间小于第一设定时间t1,则c
34
=d4。在可移动本体处于状态3和目标无人机处于状态5的情况下:
95.如果可移动本体在时间顺序上位于处于跑道上的目标无人机的前面,c
35
=d5。
96.如果可移动本体在时间顺序上位于处于跑道上的目标无人机的后面且与目标无人机处于交汇状态,则c
35
=d5。
97.如果可移动本体在时间顺序上位于处于跑道上的目标无人机的后面并且与目标无人机不处于交汇状态,则c
35
=d1。
98.在可移动本体处于状态3和目标无人机处于状态6的情况下:
99.如果可移动本体在时间顺序上位于处于跑道上的目标无人机的前面,则c
36
=d3。
100.如果可移动本体在时间顺序上位于处于跑道上的目标无人机的后面,则c
36
=d5。
101.如果可移动本体在时间顺序上位于处于跑道上的目标无人机的前面并且与目标无人机处于交汇状态,则c
36
=d5。
102.进一步地,设定的跑道冲突判定矩阵表的第4行中的预警级别满足:
103.c
41
∈{d2,d3},c
42
∈{d1,d2,d3,d4,d5},c
43
∈{d2,d5},c
44
∈{d2,d3,d4,d5},c
45
∈{d2,d4,d5},c
46
∈{d2,d3,d4,d5}。
104.其中,在可移动本体处于状态4和目标无人机处于状态1的情况下:
105.如果可移动本体和目标无人机之间处于交汇状态,如果目标无人机或可移动本体与跑道入口的距离大于第一设定距离l1,则c
41
=d2。
106.如果可移动本体和目标无人机之间处于交汇状态,如果目标无人机或可移动本体与跑道入口的距离小于第一设定距离l1但到达跑道入口的时间大于第一设定时间t1,则c
41
=d3。
107.在可移动本体处于状态4和目标无人机处于状态2的情况下:
108.如果可移动本体和目标无人机之间处于交汇状态,如果目标无人机或可移动本体与跑道入口的距离大于第一设定距离l1,则c
42
=d2。
109.如果可移动本体和目标无人机之间处于交汇状态,如果目标无人机或可移动本体与跑道入口的距离小于第一设定距离l1但到达跑道入口的时间大于第一设定时间t1,则c
42
=d3。
110.如果可移动本体和目标无人机之间处于交汇状态,如果目标无人机或可移动本体到达跑道入口的时间小于第一设定时间t1,则c
42
=d4。
111.如果可移动本体在时间顺序上位于处于跑道上的目标无人机的前面,并且如果目标无人机或可移动本体到达跑道入口的时间小于第二设定时间t2,则c
42
=d5。
112.如果可移动本体和目标无人机之间不处于交汇状态,则c
42
=d1。
113.在可移动本体处于状态4和目标无人机处于状态3的情况下:
114.如果可移动本体在时间顺序上位于处于跑道上的目标无人机的前面,并且如果目标无人机或可移动本体到达跑道入口的时间小于第二设定时间t2,则c
43
=d5。
115.如果可移动本体在时间顺序上位于处于跑道上的目标无人机的后面,如果目标无人机或可移动本体与跑道入口的距离大于第一设定距离l1,则c
43
=d2。
116.如果可移动本体在时间顺序上位于处于跑道上的目标无人机的前面并且与目标无人机处于交汇状态,则c
43
=d5。
117.在可移动本体处于状态4和目标无人机处于状态4的情况下:
118.如果可移动本体在时间顺序上位于处于跑道上的目标无人机的前面,则c
44
=d3。
119.如果可移动本体在时间顺序上位于处于跑道上的目标无人机的后面,并且如果目标无人机或可移动本体与跑道入口的距离大于第一设定距离l1之间,则c
44
=d2。
120.如果可移动本体在时间顺序上位于处于跑道上的目标无人机的前面并且与目标无人机处于交汇状态,如果目标无人机或可移动本体与跑道入口的距离大于第一设定距离l1,则c
44
=d2。
121.如果可移动本体在时间顺序上位于处于跑道上的目标无人机的前面并且与目标无人机处于交汇状态,如果目标无人机或可移动本体与跑道入口的距离小于第一设定距离l1但到达跑道入口的时间大于第一设定时间t1,则c
44
=d3。
122.如果可移动本体在时间顺序上位于处于跑道上的目标无人机的前面并且与目标无人机处于交汇状态,如果目标无人机或可移动本体到达跑道入口的时间小于第一设定时间t1,则c
44
=d4。
123.如果可移动本体在时间顺序上位于处于跑道上的目标无人机的前面并且与目标无人机处于交汇状态,如果目标无人机或可移动本体到达跑道入口的时间小于第二设定时间t2,则c
44
=d5。
124.在可移动本体处于状态4和目标无人机处于状态5的情况下:
125.如果可移动本体在时间顺序上位于处于跑道上的目标无人机的前面,并且可移动本体和目标无人机的行驶方向相同,并且目标无人机或可移动本体到达跑道入口的时间小于第二设定时间t2,则c
45
=d5。
126.如果可移动本体在时间顺序上位于处于跑道上的目标无人机的后面,如果目标无人机或可移动本体与跑道入口的距离大于第一设定距离l1,或者,如果目标无人机或可移动本体与跑道入口的距离小于第一设定距离l1但到达跑道入口的时间大于第一设定时间t1,则c
45
=d2。
127.如果可移动本体在时间顺序上位于处于跑道上的目标无人机的后面,如果目标无人机或可移动本体到达跑道入口的时间小于第一设定时间t1,则c
45
=d4。
128.如果可移动本体在时间顺序上位于处于跑道上的目标无人机的后面,如果目标无人机或可移动本体到达跑道入口的时间小于第二设定时间t2,则c
45
=d5。
129.如果可移动本体在时间顺序上位于处于跑道上的目标无人机的前面并且与目标无人机处于交汇状态,并且可移动本体和目标无人机的行驶方向相反,并且目标无人机或可移动本体到达跑道入口的时间小于第二设定时间t2,则c
45
=d5。
130.在可移动本体处于状态4和目标无人机处于状态6的情况下:
131.如果可移动本体在时间顺序上位于处于跑道上的目标无人机的前面,则c
46
=d3。
132.如果可移动本体在时间顺序上位于处于跑道上的目标无人机的后面,如果目标无人机或可移动本体与跑道入口的距离大于第一设定距离l1,或者,如果目标无人机或可移
动本体与跑道入口的距离小于第一设定距离l1但到达跑道入口的时间大于第一设定时间t1,则c
46
=d2。
133.如果可移动本体在时间顺序上位于处于跑道上的目标无人机的后面,如果目标无人机或可移动本体到达跑道入口的时间小于第一设定时间t1,则c
46
=d4。
134.如果可移动本体在时间顺序上位于处于跑道上的目标无人机的后面,如果目标无人机或可移动本体到达跑道入口的时间小于第二设定时间t2,则c
46
=d5。
135.如果可移动本体在时间顺序上位于处于跑道上的目标无人机的前面并且与目标无人机处于交汇状态,如果目标无人机或可移动本体与跑道入口的距离大于第一设定距离l1,则c
46
=d2。
136.如果可移动本体在时间顺序上位于处于跑道上的目标无人机的前面并且与目标无人机处于交汇状态,如果目标无人机或可移动本体与跑道入口的距离小于第一设定距离l1但到达跑道入口的时间大于第一设定时间t1,则c
46
=d3。
137.如果可移动本体在时间顺序上位于处于跑道上的目标无人机的前面并且与目标无人机处于交汇状态,并且目标无人机或可移动本体到达跑道入口的时间小于第一设定时间t1,则c
46
=d4。
138.如果可移动本体在时间顺序上位于处于跑道上的目标无人机的前面并且与目标无人机处于交汇状态,并且目标无人机或可移动本体到达跑道入口的时间小于第二设定时间t2,则c
46
=d5。
139.进一步地,设定的跑道冲突判定矩阵表的第5行中的预警级别满足:
140.c
51
∈{d1,d3},c
52
∈{d1,d5},c
53
∈{d2,d5},c
54
∈{d2,d3,d4,d5},c
55
∈{d2,d5},c
56
∈{d3,d5}。
141.其中,在可移动本体处于状态5和目标无人机处于状态1的情况下:
142.如果可移动本体和目标无人机处于交汇状态,则c
51
=d3。
143.如果可移动本体和目标无人机不处于交汇状态,则c
51
=d1。
144.在可移动本体处于状态5和目标无人机处于状态2的情况下:
145.如果可移动本体和目标无人机处于交汇状态,则c
52
=d5。
146.如果可移动本体和目标无人机不处于交汇状态,则c
52
=d1。
147.在可移动本体处于状态5和目标无人机处于状态3的情况下:
148.如果可移动本体在时间顺序上位于处于跑道上的目标无人机的前面,c
53
=d5。
149.如果可移动本体在时间顺序上位于处于跑道上的目标无人机的后面,c
53
=d2。
150.如果可移动本体在时间顺序上位于处于跑道上的目标无人机的前面并且与目标无人机处于交汇状态,则c
53
=d5。
151.在可移动本体处于状态5和目标无人机处于状态4的情况下:
152.如果可移动本体在时间顺序上位于处于跑道上的目标无人机的前面,如果目标无人机或可移动本体与跑道入口的距离大于第一设定距离l1,则c
54
=d2。
153.如果可移动本体在时间顺序上位于处于跑道上的目标无人机的前面,如果目标无人机或可移动本体与跑道入口的距离小于第一设定距离l1但到达跑道入口的时间大于第一设定时间t1,则c
54
=d3。
154.如果可移动本体在时间顺序上位于处于跑道上的目标无人机的前面,并且如果目
标无人机或可移动本体到达跑道入口的时间小于第一设定时间t1,则c
54
=d4。
155.如果可移动本体在时间顺序上位于处于跑道上的目标无人机的前面,并且如果目标无人机或可移动本体到达跑道入口的时间小于第二设定时间t2,则c
54
=d5。
156.如果可移动本体在时间顺序上位于处于跑道上的目标无人机的前面并且与目标无人机处于交汇状态,则c
54
=d3。
157.如果可移动本体在时间顺序上位于处于跑道上的目标无人机的前面并且与目标无人机处于交汇状态,如果目标无人机或可移动本体到达跑道入口的时间小于第一设定时间t1,则c
54
=d4。
158.如果可移动本体在时间顺序上位于处于跑道上的目标无人机的前面并且与目标无人机处于交汇状态,如果目标无人机或可移动本体到达跑道入口的时间小于第二设定时间t2,则c
54
=d5。
159.在可移动本体处于状态5和目标无人机处于状态5的情况下:
160.如果可移动本体在时间顺序上位于处于跑道上的目标无人机的前面,c
55
=d5。
161.如果可移动本体在时间顺序上位于处于跑道上的目标无人机的后面且与目标无人机处于交汇状态,则c
55
=d5。
162.如果可移动本体在时间顺序上位于处于跑道上的目标无人机的后面并且与目标无人机不处于交汇状态,则c
55
=d2。
163.在可移动本体处于状态5和目标无人机处于状态6的情况下:
164.如果可移动本体在时间顺序上位于处于跑道上的目标无人机的前面,c
56
=d3。
165.如果可移动本体在时间顺序上位于处于跑道上的目标无人机的后面,c
56
=d5。
166.如果可移动本体在时间顺序上位于处于跑道上的目标无人机的前面并且与目标无人机处于交汇状态,则c
56
=d5。
167.进一步地,设定的跑道冲突判定矩阵表的第6行中的预警级别满足:
168.c
61
=c
62
=d2,c
63
∈{d1,d5},c
64
∈{d1,d2,d3,d4,d5},c
65
∈{d2,d5},c
66
∈{d2,d3}。
169.其中,在可移动本体处于状态6和目标无人机处于状态3的情况下:
170.如果可移动本体在时间顺序上位于处于跑道上的目标无人机的前面,c
53
=d5。
171.如果可移动本体在时间顺序上位于处于跑道上的目标无人机的后面,c
53
=d1。
172.如果可移动本体在时间顺序上位于处于跑道上的目标无人机的前面并且与目标无人机处于交汇状态,则c
53
=d5。
173.在可移动本体处于状态6和目标无人机处于状态4的情况下:
174.如果可移动本体在时间顺序上位于处于跑道上的目标无人机的前面,如果目标无人机或可移动本体与跑道入口的距离大于第一设定距离l1,则c
64
=d2。
175.如果可移动本体在时间顺序上位于处于跑道上的目标无人机的前面,如果目标无人机或可移动本体与跑道入口的距离小于第一设定距离l1但到达跑道入口的时间大于第一设定时间t1,则c
64
=d3。
176.如果可移动本体在时间顺序上位于处于跑道上的目标无人机的前面,并且如果目标无人机或可移动本体到达跑道入口的时间小于第一设定时间t1,则c
64
=d4。
177.如果可移动本体在时间顺序上位于处于跑道上的目标无人机的前面,并且如果目标无人机或可移动本体到达跑道入口的时间小于第二设定时间t2,则c
64
=d5。
178.如果可移动本体在时间顺序上位于处于跑道上的目标无人机的后面,则c
64
=d1。
179.在可移动本体处于状态6和目标无人机处于状态5的情况下:
180.如果可移动本体在时间顺序上位于处于跑道上的目标无人机的前面,c
65
=d5。
181.如果可移动本体在时间顺序上位于处于跑道上的目标无人机的后面且与目标无人机处于交汇状态,则c
65
=d5。
182.如果可移动本体在时间顺序上位于处于跑道上的目标无人机的后面并且与目标无人机不处于交汇状态,则c
65
=d2。
183.在可移动本体处于状态6和目标无人机处于状态6的情况下:
184.如果可移动本体在时间顺序上位于处于跑道上的目标无人机的前面,c
66
=d3。
185.如果可移动本体在时间顺序上位于处于跑道上的目标无人机的后面,c
66
=d2。
186.如果可移动本体在时间顺序上位于处于跑道上的目标无人机的前面并且与目标无人机处于交汇状态,则c
56
=d3。
187.进一步地,设定的跑道冲突矩阵判断表可如下表1所示:
188.表1
189.190.[0191][0192][0193]
其中,在表1中:
[0194]
n表示无冲突风险;t表示ti;r表示rsi;c表示caution;w表示warning;ahead表示它机在时间顺序上位于处于跑道上的本机的前面;behind表示它机在时间顺序上位于处于跑道上的本机的后面;head on表示它机在时间顺序上位于处于跑道上的本机的前面并且与本机处于交汇状态。
[0195]
s70,获取w中的级别等级最高的预警级别w
max
=max(w1,w2,
…
,wm),并执行对应的冲突规避策略。
[0196]
进一步地,在本发明实施例中,所述机载控制器还与无人机远程控制平台通信连接。
[0197]
其中,d1对应的冲突规避策略包括:目标无人机不执行冲突规避操作,按照计划任务执行飞行。
[0198]
d2对应的冲突规避策略包括:目标无人机不执行冲突规避操作,并且无人机远程控制平台执行监测d2对应的可移动本体的操作。即无人机无需做冲突规避,只需要远程控制台密切关注“交通提醒”状态的他机。
[0199]
d3对应的冲突规避策略包括:目标无人机不执行冲突规避操作,并且无人机远程控制平台持续关注跑道状态,并执行监测d3对应的可移动本体的操作;即无人机无需做冲突规避,只需远程控制台密切关注“跑道提醒”状态的跑道,在起飞或着陆前做冲突风险确认。
[0200]
d4对应的冲突规避策略包括:目标无人机将对应的冲突规避操作发送所述无人机远程控制平台,并且,如果在设定时间范围内接收到无人机远程控制平台发送的规避调整信息,则目标无人机按照所述规避调整信息执行相应的冲突规避操作。远程控制台在设定时间范围内可以依据无人机发送的存在冲突威胁的航空器/车辆信息、冲突预警信息和规避动作,对冲突规避方案进行调整。如果哎设定时间范围内没有接收到无人机远程控制平台发送的响应信息,则目标无人机可执行自主判断的冲突规避操作。
[0201]
d5对应的冲突规避策略包括:目标无人机立即执行对应的冲突规避操作即无需通无人机控制平台,目标无人机直接执行对应的冲突规避操作。
[0202]
虽然已经通过示例对本技术的一些特定实施例进行了详细说明,但是本领域的技术人员应该理解,以上示例仅是为了进行说明,而不是为了限制本技术的范围。本领域的技术人员还应理解,可以对实施例进行多种修改而不脱离本技术的范围和精神。本技术公开的范围由所附权利要求来限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1