一种基于改进OLF-Elman神经网络的最优路径预测方法
elman神经网络的输入向量;
14.所述隐藏层的神经元个数为m表示输入层中的神经元个数,n表示输出层的神经元个数;o表示固定参数;
15.所述输出层中的n个神经元的目标输出为并作为改进olf-elman神经网络的输出向量;
16.所述第一承接层和第二承接层的神经元个数均等于所述隐藏层的神经元个数;
17.步骤2:改进olf-elman神经网络的训练过程;
18.步骤2.1:定义p为当前训练步长,并初始化p=1;
19.步骤2.2:利用式(1)得到所述改进olf-elman神经网络的数学模型:
[0020][0021]
式(1)中,x
p
表示第p次迭代时输入层的输入,k
p+1
表示第p次迭代时隐藏层的输出,y
p+1
表示第p次迭代时的输出层的输出,表示第p次迭代时隐藏层的输入,y
cp+1
表示第p次迭代时输出层的输入,k
p
表示第p-1次迭代时隐藏层的输出,y
p
表示第p-1次迭代时的输出层的输出,表示第p次迭代时从输入层到隐藏层的连接权重,表示第p次迭代时从隐藏层到输出层的连接权重,表示第p次迭代时从隐藏层与输入层之间的第一承接层到隐藏层的连接权重,表示第p次迭代时从输出层与输入层之间的第二承接层到隐藏层的连接权重,α表示第一承接层的连接反馈因子,β表示第二承接层的连接反馈因子;f(
·
)表示隐藏层激活函数,g(
·
)表示输出层激活函数;当p=1时,令x
p
=x;
[0022]
步骤2.3:利用式(2)得到所述改进olf-elman神经网络的训练过程中第p次迭代时的输出与目标输出之间的误差e
p
:
[0023][0024]
式(2)中,y
p
是所述改进olf-elman神经网络中第p次迭代时的目标输出;当p=1时,令y
p
=y;
[0025]
步骤2.4:利用式(3)得到所述改进olf-elman神经网络的连接权重自适应调节过程:
[0026][0027]
式(3)中,w
hp+1
表示第p+1次迭代时的第h个连接权重,δw
hp
表示第p次迭代时的第h个连接权重w
hp+1
的变化量,η
p
表示所述改进olf-elman神经网络在第p次迭代时的步长;δ为参数,且δ∈[-1,1];h=1,2,3,4;
[0028]
步骤2.5:利用式(4)得到所述改进olf-elman神经网络的步长自适应调节过程:
[0029][0030]
式(4)中,r
p
是所述改进olf-elman神经网络的训练过程中第p次迭代时输出y
p
与目标输出y
p
之间的误差的笛卡尔距离,p为当前迭代总次数,η
p-1
表示所述改进olf-elman神经网络在第p-1次迭代时的步长,r
p-1
是所述改进olf-elman神经网络的训练过程中第p-1次迭代时输出y
p-1
与目标输出y
p-1
之间的误差的笛卡尔距离,r
p-2
是所述改进olf-elman神经网络的训练过程中第p-2次迭代时输出y
p-2
与目标输出y
p-2
之间的误差的笛卡尔距离;
[0031]
步骤3:p+1赋值给p后,返回步骤2.2顺序执行,直至误差小于所设定的范围或者p达到最大迭代次数p
max
时停止训练,从而得到训练好的改进olf-elman神经网络。
[0032]
与现有技术相比,本发明的有益效果体现在:
[0033]
1、本发明将用户终端和后台联系起来,利用一种基于改进olf-elman神经网络的方法训练可以帮助用户在任意时刻得到最佳路径选择,解决了当前不能有效反映未来一段时间的车流分布和预测精度低等问题,使得车流分布更加均匀,可以缓解城市交通拥堵压力,提高了出行质量。
[0034]
2、本发明操作简单,用户只需在用户终端选择起始地和目的地,即可以通过后台获取最佳路径。
[0035]
3、本发明依据改进olf-elman神经网络训练得出的结果,考虑的因素较为全面,因此其合理性和有效性可以得到保障。
[0036]
4、本发明在elman神经网络模型基础上提出模型改进,添加输出层与输入层之间的承接层,优化模型,避免陷入局部最优,保证其训练的稳定性,从而根据历史数据、实时车流数据和正常的通行时间相结合来准确预测车辆预测车流数据,预测准确率高。
[0037]
5、本发明在elman神经网络模型基础上提出权重改进,其权重调整值系数逐渐变小,此时可以有效防止其陷入局部最优,平衡其探索与开发能力,从而根据历史数据、实时车流数据和正常的通行时间相结合来迅速预测车辆预测车流数据,预测速率高。
附图说明
[0038]
图1为改进olf-elman神经网络示意图;
[0039]
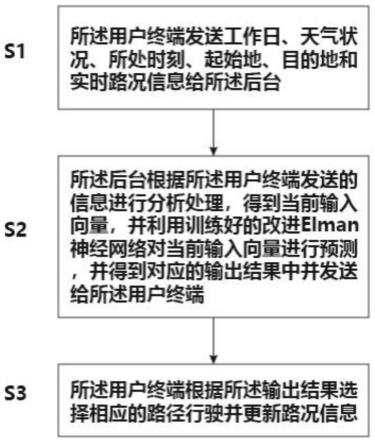
图2为一种基于改进olf-elman神经网络的最优路径预测流程图;
[0040]
图3为一种基于改进olf-elman神经网络的最优路径预测预期结果图。
具体实施方式
[0041]
本实施例中,一种基于改进olf-elman神经网络的最优路径预测方法,是应用于由图1所示的用于准确迅速预测的改进olf-elman神经网络、由图2所示的用于待预测的工作日、天气状况、所处时刻、起始地、目的地和实时路况信息给后台的网络环境中,最终得到由图3所示的一种基于改进olf-elman神经网络的最优路径预测预期结果,下面结合附图和实施例对本发明的技术方案做进一步的说明。
[0042]
如图1所示,一种基于改进olf-elman神经网络的构建,包括:
[0043]
步骤1:构建改进olf-elman神经网络,包括:输入层、隐藏层、输出层、隐藏层与输入层之间的第一承接层、输出层与输入层之间的第二承接层;
[0044]
输入层中的m个神经元的输入为并作为改进olf-elman神经网络的输入向量;
[0045]
隐藏层的神经元个数为m表示输入层中的神经元个数,n表示输出层的神经元个数;o表示固定参数;
[0046]
输出层中的n个神经元的目标输出为并作为改进olf-elman神经网络的输出向量;
[0047]
第一承接层和第二承接层的神经元个数均等于隐藏层的神经元个数;
[0048]
步骤2:改进olf-elman神经网络的训练过程;
[0049]
步骤2.1:定义p为当前训练步长,并初始化p=1;
[0050]
步骤2.2:利用式(1)得到改进olf-elman神经网络的数学模型:
[0051][0052]
式(1)中,x
p
表示第p次迭代时输入层的输入,k
p+1
表示第p次迭代时隐藏层的输出,y
p+1
表示第p次迭代时的输出层的输出,表示第p次迭代时隐藏层的输入,y
cp+1
表示第p次迭代时输出层的输入,k
p
表示第p-1次迭代时隐藏层的输出,y
p
表示第p-1次迭代时的输出层的输出,表示第p次迭代时从输入层到隐藏层的连接权重,表示第p次迭代时从隐藏层到输出层的连接权重,表示第p次迭代时从隐藏层与输入层之间的第一承接层到隐藏层的连接权重,表示第p次迭代时从输出层与输入层之间的第二承接层到隐藏层的连接权重,α表示第一承接层的连接反馈因子,β表示第二承接层的连接反馈因子;f(
·
)表示隐藏层激活函数,g(
·
)表示输出层激活函数;当p=1时,令x
p
=x;
[0053]
步骤2.3:利用式(2)得到改进olf-elman神经网络的训练过程中第p次迭代时的输出与目标输出之间的误差e
p
:
[0054][0055]
式(2)中,y
p
是改进olf-elman神经网络中第p次迭代时的目标输出;当p=1时,令y
p
=y;
[0056]
步骤2.4:利用式(3)得到改进olf-elman神经网络的连接权重自适应调节过程:
[0057][0058]
式(3)中,w
hp+1
表示第p+1次迭代时的第h个连接权重,δw
hp
表示第p次迭代时的第h
个连接权重w
hp+1
的变化量,η
p
表示改进olf-elman神经网络在第p次迭代时的步长;δ为参数,且δ∈[-1,1];h=1,2,3,4;
[0059]
步骤2.5:利用式(4)得到改进olf-elman神经网络的步长自适应调节过程:
[0060][0061]
式(4)中,r
p
是改进olf-elman神经网络的训练过程中第p次迭代时输出y
p
与目标输出y
p
之间的误差的笛卡尔距离,p为当前迭代总次数,η
p-1
表示改进olf-elman神经网络在第p-1次迭代时的步长,r
p-1
是改进olf-elman神经网络的训练过程中第p-1次迭代时输出y
p-1
与目标输出y
p-1
之间的误差的笛卡尔距离,r
p-2
是改进olf-elman神经网络的训练过程中第p-2次迭代时输出y
p-2
与目标输出y
p-2
之间的误差的笛卡尔距离;
[0062]
步骤3:p+1赋值给p后,返回步骤2.2顺序执行,直至误差小于所设定的范围或者p达到最大迭代次数p
max
时停止训练,从而得到训练好的改进olf-elman神经网络。
[0063]
如图2所示,一种基于改进olf-elman神经网络的最优路径预测流程,包括:
[0064]
步骤a:后台收集真实场景下的当前城市的历史车流数据并作为原始数据,包括:当前所处第i个工作日weeki,i=1,2,3,
…
,7、当前所处的第j种天气状况weatherj,j=1,2,3,
…
,m、当前所处的时刻t、当前t时刻起始地和目的地之间存在的第l条道路的流量l=1,2,3,
…
,n以及起始地和目的地之间存在的第l条道路的流量为q
l
时对应的平均行驶速度v
l
;
[0065]
步骤b:后台使用原始数据对改进olf-elman神经网络进行训练得到训练好的改进olf-elman神经网络;
[0066]
步骤c:用户终端发送待预测的工作日、天气状况、所处时刻、起始地、目的地和实时路况信息给后台;
[0067]
步骤d:后台根据用户终端发送的待预测信息进行处理,得到当前输入向量,并利用训练好的改进olf-elman神经网络对当前输入向量进行预测,得到对应的输出结果并发送给用户终端;
[0068]
步骤e:用户终端根据输出结果选择相应的路径行驶并更新路况信息。
[0069]
如图3所示,一种基于改进olf-elman神经网络的最优路径预测预期结果,包括图3中左图所示当前车流分布下的最优路径,但可能在未来一段时间内,当前车流分布下的最优路径并不是最优路径,而图3中右图所示预测车流分布下的最优路径才是,使用本发明的一种基于改进olf-elman神经网络的最优路径预测方法可以达到这一效果。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1