基于ADS-B的飞行器空中防撞方法与流程
16.1)同时满足:
17.①
入侵机和本机之间的距离正在收敛;
18.②
满足不等式其中
19.其中为距离变化率,dm为敏感度等级,
20.2)入侵机与本机之间距离是发散的,但是当前距离差小于dm,并且发散速度为“慢”;
21.3)当前周期无法计算估算的距离差,或者估算的距离差小于hm,其中dm、hm均为敏感等级;
22.高度测试:(a)高度相关参数定义、(b)高度收敛、(c)垂直距离差、(d)到达同高度的时间、(e)ra高度测试准则、(f)ta高度测试准则,
23.(a)高度相关参数定义;
24.1)当前高度间隔a:当前跟踪的本机和入侵机之间的高度间隔,如果a<zt,则当前高度间隔为“小”,zt取值为zthr,ra垂直门限;
25.2)高度发散率a的变化率;
26.3)到达cpa的时间τu,τm:到达最近距离的估计时间;
27.①
τu:最大值,二者做直线相对运动且cpa处距离差为0;
28.②
τm:最小值,二者做直线相对运动且cpa处距离差为dm;
29.4)到达同高度的时间τv:预计达到同一高度所需的时间;
30.5)垂直距离差vm:在cpa的估算时间内对预期高度间隔的最低估计,
31.(b)高度收敛;根据本机和入侵机的跟踪高度,高度发散率由二者的高度变化率差值定义,具体参见下式:
[0032][0033]
当<时,目标高度收敛,其中0<≤0.3m/s(60fpm),
[0034]
(c)垂直距离差;目标距离收敛时≤0,到达cpa的时间和垂直距离差计算过程如下:
[0035][0036][0037][0038][0039][0040]
若|vm|《zm,则认为垂直距离差“小”,其中zm即zthr,
[0041]
其中为距离变化率,为高度散发率,vm为垂直距离差,τu为最大值,τm为最小值,τv为到达同高度的时间,vm为垂直距离差,
[0042]
(d)到达同高度的时间
[0043]
当高度收敛时,目标到达同一高度的时间:
[0044]
如果目标在高度和距离上不收敛,则不用计算τv,
[0045]
如果本机的垂直速率不大于600fpm,或者本机与入侵机垂直速度的方向一致,但是量值更小一点,此时若τv<tv,则认为τv为“小”,
[0046]
针对所有的目标相遇情况,只要τv<t,则认为τv为“小”;
[0047]
(e)ra高度测试准则
[0048]
满足以下任一条件,高度测试结果为正,
[0049]
1)目标正在距离上收敛,当前高度间隔和垂直距离差为“小”;
[0050]
2)目标正在距离和高度上收敛,到达同一高度的时间为“小”,并且垂直距离差为“小”或者预计在到达cpa之前到达同一高度(即τv<τu);
[0051]
距离正在发散但是当前高度间隔为“小”;
[0052]
(f)ta高度测试准则
[0053]
满足以下任一条件,高度测试结果为正,
[0054]
1)当前的高度间隔为“小”;
[0055]
2)目标高度收敛,并且到达同一高度的时间为“小”;
[0056]
其中到达同一高度的时间阈值为ta告警时间,对应于表68中描述的zt取值为ta垂直门限zthrta;
[0057]
s5.根据s4的测试结果,进而对目标威胁状态进行判断其威胁等级可分为:ot无威胁目标、pt临近威胁目标、ta潜在威胁目标和ra威胁目标,当相对距离大于11.112km并小于80km,相对高度大于-365.76m并小于+365.76m,距离测试或高度测试为“负”的时候为ot无威胁目标,相对距离小于11.112km,相对高度大于-365.76m并小于+365.76m,距离测试或高度测试为“负”的时候为pt临近威胁目标,ta距离测试和ta高度测试均为“正”在20s~48s内到达cpa点,按不同的高度层选择,为ta潜在威胁目标,ra距离测试和ra高度测试为“正”在15s~35s内到达cpa点,按不同的高度层选择,为ra威胁目标。
[0058]
s6.综合上述的中获取的具体参数数值结合确定组合控制、垂直控制等参数进行语音告警,并上报接口。
[0059]
(三)有益效果
[0060]
本发明提供了基于ads-b的飞行器空中防撞方法。具备以下有益效果:
[0061]
1、本发明中,通过采用以上的防撞技术(防撞算法)可以大大简化原有tcas系统的复杂性,可以在原有的s模式应答机或者atc应答机的硬件上实现该算法,从而实现空中的态势感知和防撞预警功能,具有较强的经济性效果。
[0062]
2、本发明中,通过简化的防撞算法其核心仍满足tcas系统的国际标准,因此不会对飞行器的飞行安全造成影响。
附图说明
[0063]
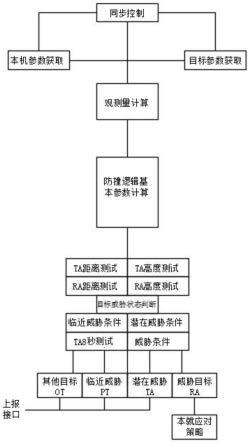
图1为本发明中空中防撞技术的威胁等级评估准则;
[0064]
图2为本发明中空中防撞技术的威胁等级评估流程;
[0065]
图3为本发明中空中防撞技术的本机应对策略流程;
[0066]
图4为本发明中感知状态的输入输出关系图;
[0067]
图5为本发明中强度选择的输入输出关系图;
[0068]
图6为本发明中反转状态选择的输入输出关系图;
[0069]
图7为本发明中交叉状态的输入输出关系图;
[0070]
图8为本发明中平飞状态的输入输出关系图;
[0071]
图9为本发明中改变强度的输入输出关系图;
[0072]
图10为本发明中组合控制的输入输出关系图;
[0073]
图11为本发明中垂直控制的输入输出关系图;
[0074]
图12为本发明中向上/向下控制的输入输出关系图;
[0075]
图13为本发明中整机设计连接框图。
具体实施方式
[0076]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0077]
实施例一:
[0078]
如图1-13所示,本发明实施例提供基于ads-b的飞行器空中防撞方法,包括以下步骤:
[0079]
s1.本机参数和目标参数获取,其本机参数主要获取本机经纬度和本机气压高度,目标参数获取主要获取目标经纬度、目标高度和目标高度率;
[0080]
s2.根据上个步骤获取的参数进行观测量计算,具体计算项目包括:目标距离、目标距离率、目标方位角、本机、目标跟踪高度/高度率和本机、目标数据状态标志;
[0081]
s3.根据s2中获取的具体参数再进行防撞逻辑基本参数计算,其具体的计算项目包括:本机灵敏度、本机高度层、目标相对高度/高度率、各类门限常数、各种抑制标志、威胁相遇时间和修正相遇高度/时间;
[0082]
s4.根据s2和s3测得的数据结果进行ta距离测试、ta高度测试和ra距离测试、ra高度测试,其中距离测试标准:
[0083]
距离收敛:
[0084]
如果距离变化率,小于取值为6kt,即3m/s,,那么认为该目标与本机距离是收敛的,此时,用于距离测试的距离变化率为和中的最小值,距离发散:
[0085]
若目标没有达到距离收敛的状态,则视为距离发散,如果估算的距离和距离变化率的乘积小于则认为发散较“慢”,
[0086]
以下条件1)、2)、3)满足任意一个,即可宣布距离测试结果为“正”[0087]
1)同时满足:
[0088]
①
入侵机和本机之间的距离正在收敛;
[0089]
②
满足不等式其中
[0090]
其中为距离变化率,dm为敏感度等级,
[0091]
2)入侵机与本机之间距离是发散的,但是当前距离差小于dm,并且发散速度为“慢”;
[0092]
3)当前周期无法计算估算的距离差,或者估算的距离差小于hm,其中dm、hm均为敏感等级;
[0093]
高度测试:(a)高度相关参数定义、(b)高度收敛、(c)垂直距离差、(d)到达同高度的时间、(e)ra高度测试准则、(f)ta高度测试准则,
[0094]
(a)高度相关参数定义;
[0095]
1)当前高度间隔a:当前跟踪的本机和入侵机之间的高度间隔,如果a<zt,则当前高度间隔为“小”,zt取值为zthr,ra垂直门限;
[0096]
2)高度发散率a的变化率;
[0097]
3)到达cpa的时间τu,τm:到达最近距离的估计时间;
[0098]
①
τu:最大值,二者做直线相对运动且cpa处距离差为0;
[0099]
②
τm:最小值,二者做直线相对运动且cpa处距离差为dm;
[0100]
4)到达同高度的时间τv:预计达到同一高度所需的时间;
[0101]
5)垂直距离差vm:在cpa的估算时间内对预期高度间隔的最低估计,
[0102]
(b)高度收敛;根据本机和入侵机的跟踪高度,高度发散率由二者的高度变化率差值定义,具体参见下式:
[0103][0104]
当<时,目标高度收敛,其中0<≤0.3m/s(60fpm),
[0105]
(c)垂直距离差;目标距离收敛时(≤0),到达cpa的时间和垂直距离差计算过程如下:
[0106][0107][0108][0109][0110][0111]
若|vm|《zm,则认为垂直距离差“小”,其中zm即zthr,
[0112]
其中为距离变化率,为高度散发率,vm为垂直距离差,τu为最大值,τm为最小值,τv为到达同高度的时间,vm为垂直距离差,
[0113]
(d)到达同高度的时间
[0114]
当高度收敛时,目标到达同一高度的时间:
[0115]
如果目标在高度和距离上不收敛,则不用计算τv,
[0116]
如果本机的垂直速率不大于600fpm,或者本机与入侵机垂直速度的方向一致,但是量值更小一点,此时若τv<tv,则认为τv为“小”,
[0117]
针对所有的目标相遇情况,只要τv<t,则认为τv为“小”;
[0118]
(e)ra高度测试准则
[0119]
满足以下任一条件,高度测试结果为正,
[0120]
1)目标正在距离上收敛,当前高度间隔和垂直距离差为“小”;
[0121]
2)目标正在距离和高度上收敛,到达同一高度的时间为“小”,并且垂直距离差为“小”或者预计在到达cpa之前到达同一高度即τv<τu;
[0122]
距离正在发散但是当前高度间隔为“小”;
[0123]
(f)ta高度测试准则
[0124]
满足以下任一条件,高度测试结果为正,
[0125]
1)当前的高度间隔为“小”;
[0126]
2)目标高度收敛,并且到达同一高度的时间为“小”;
[0127]
其中到达同一高度的时间阈值为ta告警时间,对应于表68中描述的zt取值为ta垂直门限zthrta;
[0128]
s5.根据s4的测试结果,进而对目标威胁状态进行判断其威胁等级可分为:ot无威胁目标、pt临近威胁目标、ta潜在威胁目标和ra威胁目标,当相对距离大于11.112km并小于80km,相对高度大于-365.76m并小于+365.76m,距离测试或高度测试为“负”的时候为ot无威胁目标,相对距离小于11.112km,相对高度大于-365.76m并小于+365.76m,距离测试或高度测试为“负”的时候为pt临近威胁目标,ta距离测试和ta高度测试均为“正”在20s~48s内到达cpa点,按不同的高度层选择,为ta潜在威胁目标,ra距离测试和ra高度测试为“正”在15s~35s内到达cpa点,按不同的高度层选择,为ra威胁目标。
[0129]
s6.综合上述的中获取的具体参数数值结合确定组合控制、垂直控制等参数进行语音告警,并上报接口。
[0130]
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1