基于多维度的风险预测管理系统及方法
1.本发明涉及车辆驾驶控制技术领域,具体为一种基于多维度的风险预测管理系统及方法。
背景技术:
2.随着车辆保有量增加,道路安全事故时有发生,而通过研究表明车辆交通事故中,不良驾驶行为导致的事故占绝大多数。因此如何有效评估驾驶人员的驾驶风险,对驾驶人员的风险驾驶行为进行辨识,是降低车辆事故的关键技术手段之一。当前针对车辆行驶过程中的风险评估大多维度单一,且仅针对驾驶人员的驾驶行为进行分析,难以准确的评价车辆行驶过程中的风险。
技术实现要素:
3.本发明的目的之一在于提供一种基于多维度的风险预测管理系统,以解决现有技术中对车辆行驶过程中的风险评估维度单一,以及难以准确评价的技术问题。
4.本发明提供的基础方案一:基于多维度的风险预测管理系统,包括:
5.数据获取模块,用于获取行驶数据、驾驶数据和环境数据;
6.行驶风险预测模块,用于根据行驶数据生成行驶风险系数和行驶风险预测结果;
7.驾驶风险预测模块,用于根据驾驶数据生成驾驶风险系数和驾驶风险预测结果;
8.环境风险预测模块,用于根据环境数据生成环境风险系数和环境风险预测结果;
9.综合风险预测模块,用于根据行驶风险系数、驾驶风险系数和环境风险系数生成综合风险系数,根据综合分析系数筛选预设的推送数据,根据推送数据、行驶风险预测结果、驾驶风险预测结果和环境风险预测结果生成推送信息。
10.基础方案一的有益效果:
11.行驶数据车辆为行驶过程中的车速、加减速、刹车等车辆数据,驾驶数据为反映车内驾驶人员驾驶行为的数据,例如车内图像,环境数据为天气、路况等的数据,通过与第三方的合作获取。
12.行驶风险预测模块、驾驶风险预测模块和环境风险预测模块,分别从车辆行驶、驾驶人员驾驶和环境三大维度进行风险预测,获得相应的风险系数和风险预测结果。通过综合风险预测模块的设置,对多个维度的风险预测进行综合分析,从而实现对车辆行驶过程中的风险进行准确评价。同时,结合综合分析结果筛选对应的推送数据生成推送信息进行推送,从而提醒驾驶人员,辅助驾驶人员进行风险规避。
13.进一步,行驶数据包括行驶速度和道路限速;行驶风险预测模块用于根据行驶速度和道路限速计算速度差,根据速度差生成驾驶风险系数,当行驶速度小于道路限速时,速度差越大,驾驶风险系数越小,反之速度差越小,驾驶风险系数越小。
14.有益效果:通过行驶速度和道路限速判断驾驶人员是否超速,在未超速的情况下,行驶速度越靠近道路限速风险越高,在超速情况下,行驶速度越远离道路限速风险越高,以
此生成驾驶风险系数。
15.进一步,驾驶数据包括车内图像,驾驶风险预测模块用于根据车内图像进行行为识别,判断驾驶人员是否出现不良驾驶行为,当出现不良驾驶行为时,根据不良驾驶行为生成驾驶风险系数。
16.有益效果:通过车内图像对驾驶人员进行行为识别,便于实现。
17.进一步,不良驾驶行为包括疲劳驾驶、手离开方向盘、开车抽烟、开车玩手机和从车窗丢垃圾,不同驾驶行为预设有不同的危险值,驾驶风险预测模块用于当出现不良驾驶行为时,根据不良驾驶行为获取对应的危险值生成驾驶风险系数。
18.有益效果:不良驾驶行为是指驾驶人员在驾驶过程中出现的容易导致道路交通事故的行为,例如疲劳驾驶、手离开方向盘、开车抽烟、开车玩手机和从车窗丢垃圾,通过行驾驶风险预测模块判断驾驶人员是否存在不良驾驶行为,以此生成驾驶风险系数。
19.进一步,环境数据包括天气情况、道路情况和视线情况,环境风险预测模块用于根据天气情况、道路情况和视线情况分析是否影响车辆行驶,生成环境风险系数。
20.有益效果:天气情况能够反映路面是否较滑,道路情况能够反映路况,视线情况能够反映行驶过程中的能见度。通过环境维度下的三个小维度进一步对环境风险进行预测,以生成环境风险系数。
21.进一步,环境数据还包括周围车辆图像,环境风险预测模块用于根据周围车辆图像分析周围车辆的车辆破损情况,根据车辆破损情况生成环境风险系数。
22.有益效果:车辆破损情况能够反映周围车辆曾发生事故的次数和严重程度,以此预测与其他车辆发生碰撞事故的风险,以此生成环境风险系数。
23.本发明的目的之二在于提供一种基于多维度的风险预测管理方法。
24.本发明提供基础方案二:基于多维度的风险预测管理方法,包括以下内容:
25.获取行驶数据、驾驶数据和环境数据;
26.根据行驶数据生成行驶风险系数和行驶风险预测结果;根据驾驶数据生成驾驶风险系数和驾驶风险预测结果;根据环境数据生成环境风险系数和环境风险预测结果;
27.根据行驶风险系数、驾驶风险系数和环境风险系数生成综合风险系数,根据综合分析系数筛选预设的推送数据,根据推送数据、行驶风险预测结果、驾驶风险预测结果和环境风险预测结果生成推送信息。
28.基础方案二的有益效果:
29.分别从车辆行驶、驾驶人员驾驶和环境三大维度进行风险预测,获得相应的风险系数和风险预测结果。通过对多个维度的风险预测进行综合分析,从而实现对车辆行驶过程中的风险进行准确评价。同时,结合综合分析结果筛选对应的推送数据生成推送信息进行推送,从而提醒驾驶人员,辅助驾驶人员进行风险规避。
30.进一步,行驶数据包括行驶速度和道路限速;根据行驶数据生成行驶风险系数,包括以下内容:根据行驶速度和道路限速计算速度差,根据速度差生成驾驶风险系数,当行驶速度小于道路限速时,速度差越大,驾驶风险系数越小,反之速度差越小,驾驶风险系数越小。
31.有益效果:通过行驶速度和道路限速判断驾驶人员是否超速,在未超速的情况下,行驶速度越靠近道路限速风险越高,在超速情况下,行驶速度越远离道路限速风险越高,以
此生成驾驶风险系数。
32.进一步,驾驶数据包括车内图像,根据驾驶数据生成驾驶风险系数,包括以下内容:根据车内图像进行行为识别,判断驾驶人员是否出现不良驾驶行为,当出现不良驾驶行为时,根据不良驾驶行为生成驾驶风险系数。
33.有益效果:不良驾驶行为是指驾驶人员在驾驶过程中出现的容易导致道路交通事故的行为,例如疲劳驾驶、手离开方向盘、开车抽烟、开车玩手机和从车窗丢垃圾,通过判断驾驶人员是否存在不良驾驶行为,以此实现对驾驶人员驾驶行为的风险预测。
34.进一步,环境数据包括天气情况、道路情况、视线情况和周围车辆图像,根据环境数据生成环境风险系数,包括以下内容:根据周围车辆图像分析周围车辆的车辆破损情况,根据天气情况、道路情况和视线情况分析是否影响车辆行驶,生成环境风险系数,生成环境风险系数时还根据车辆破损情况生成。
35.有益效果:通过环境维度下的四个小维度进一步对环境风险进行预测,以生成环境风险系数。
附图说明
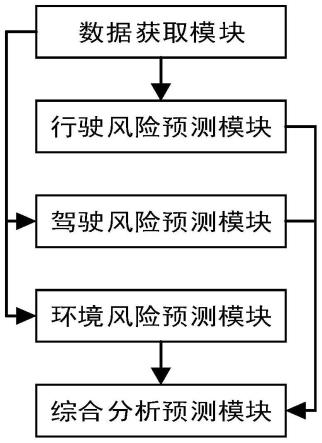
36.图1为本发明基于多维度的风险预测管理系统实施例一的逻辑框图。
具体实施方式
37.下面通过具体实施方式进一步详细说明:
38.实施例一
39.基于多维度的风险预测管理系统,如附图1所示,包括数据获取模块、行驶风险预测模块、驾驶风险预测模块、环境风险预测模块和综合风险预测模块。
40.数据获取模块用于获取行驶数据、驾驶数据和环境数据;行驶数据车辆为行驶过程中的车速、加减速、刹车等车辆数据,驾驶数据为反映车内驾驶人员驾驶行为的数据,例如车内图像,环境数据为天气、路况等的数据,通过与第三方的合作获取。
41.行驶风险预测模块用于根据行驶数据生成行驶风险系数和行驶风险预测结果。行驶数据包括车辆的行驶速度和车辆所在道路的道路限速,行驶风险预测结果包括超速和未超速。具体的,行驶风险预测模块用于根据行驶速度和道路限速计算速度差,根据速度差生成驾驶风险系数,当行驶速度小于道路限速时,此时车辆未超速,速度差越大,驾驶风险系数越小,同时,生成未超速的行驶风险预测结果;反之当行驶速度不小于道路限速时,此时车辆超速,速度差越小,驾驶风险系数越小,同时生成超速的行驶风险预测结果。
42.驾驶风险预测模块用于根据驾驶数据生成驾驶风险系数和驾驶风险预测结果。驾驶数据包括车内图像,车内图像为采集的包含车内驾驶人员的图像数据。具体的,驾驶风险预测模块用于根据车内图像进行行为识别,判断驾驶人员是否出现不良驾驶行为,当出现不良驾驶行为时,根据不良驾驶行为生成驾驶风险系数。不良驾驶行为包括疲劳驾驶、手离开方向盘、开车抽烟、开车玩手机和从车窗丢垃圾,不同驾驶行为预设有不同的危险值。驾驶风险预测模块用于当出现不良驾驶行为时,根据不良驾驶行为获取对应的危险值生成驾驶风险系数。同时,驾驶风险预测模块用于生成对应不良驾驶行为的驾驶风险预测结果,当无不良驾驶行为时,生成驾驶行为优秀的驾驶风险预测结果。驾驶风险系数的生成具体为:
危险值均大于1,危险风险系数为不良驾驶行为对应危险值的乘积。
43.环境风险预测模块用于根据环境数据生成环境风险系数和环境风险预测结果。环境数据包括天气情况、道路情况、视线情况和周围车辆图像,天气情况能够反映路面是否较滑,道路情况能够反映路况,视线情况能够反映行驶过程中的能见度,周围车辆图像为采集的包含周围车辆的图像数据。具体的,环境风险预测模块用于根据周围车辆图像分析周围车辆的车辆破损情况,车辆破损情况能够反映周围车辆曾发生事故的次数和严重程度,环境风险预测模块用于根据天气情况、道路情况和视线情况分析是否影响车辆行驶,生成环境风险系数,生成环境风险系数时,还根据车辆破损情况生成。
44.环境风险预测模块用于当天气情况为雨雪时,生成路滑的环境风险预测结果;当道路情况为拥堵或陡峭时,生成路况不佳的环境风险预测结果;当视线情况为能见度低于预设能见度阈值时,生成能见度低的环境风险预测结果;当车辆破损情况为破损面积大于预设破损阈值时,生成容易发生事故的环境预测结果。
45.综合风险预测模块用于根据行驶风险系数、驾驶风险系数和环境风险系数生成综合风险系数,根据综合分析系数筛选预设的推送数据,根据推送数据、行驶风险预测结果、驾驶风险预测结果和环境风险预测结果生成推送信息。例如,当驾驶人员存在不良驾驶行为时,推送信息为当前预测风险为中等,但您存在不良驾驶行为,请注意规范驾驶。
46.基于多维度的风险预测管理方法,使用上述基于多维度的风险预测管理系统,包括以下内容:
47.获取行驶数据、驾驶数据和环境数据。
48.根据行驶数据生成行驶风险系数和行驶风险预测结果。行驶数据包括车辆的行驶速度和车辆所在道路的道路限速,行驶风险预测结果包括超速和未超速。具体的,根据行驶速度和道路限速计算速度差,根据速度差生成驾驶风险系数,当行驶速度小于道路限速时,此时车辆未超速,速度差越大,驾驶风险系数越小,同时,生成未超速的行驶风险预测结果;反之当行驶速度不小于道路限速时,此时车辆超速,速度差越小,驾驶风险系数越小,同时生成超速的行驶风险预测结果。
49.根据驾驶数据生成驾驶风险系数和驾驶风险预测结果。驾驶数据包括车内图像,车内图像为采集的包含车内驾驶人员的图像数据。具体的,根据车内图像进行行为识别,判断驾驶人员是否出现不良驾驶行为,当出现不良驾驶行为时,根据不良驾驶行为生成驾驶风险系数。不良驾驶行为包括疲劳驾驶、手离开方向盘、开车抽烟、开车玩手机和从车窗丢垃圾,不同驾驶行为预设有不同的危险值。当出现不良驾驶行为时,根据不良驾驶行为获取对应的危险值生成驾驶风险系数。同时,生成对应不良驾驶行为的驾驶风险预测结果,当无不良驾驶行为时,生成驾驶行为优秀的驾驶风险预测结果。驾驶风险系数的生成具体为:危险值均大于1,危险风险系数为不良驾驶行为对应危险值的乘积。
50.根据环境数据生成环境风险系数和环境风险预测结果。环境数据包括天气情况、道路情况、视线情况和周围车辆图像,天气情况能够反映路面是否较滑,道路情况能够反映路况,视线情况能够反映行驶过程中的能见度,周围车辆图像为采集的包含周围车辆的图像数据。具体的,根据周围车辆图像分析周围车辆的车辆破损情况,车辆破损情况能够反映周围车辆曾发生事故的次数和严重程度,根据天气情况、道路情况和视线情况分析是否影响车辆行驶,生成环境风险系数,生成环境风险系数时,还根据车辆破损情况生成。
51.当天气情况为雨雪时,生成路滑的环境风险预测结果;当道路情况为拥堵或陡峭时,生成路况不佳的环境风险预测结果;当视线情况为能见度低于预设能见度阈值时,生成能见度低的环境风险预测结果;当车辆破损情况为破损面积大于预设破损阈值时,生成容易发生事故的环境预测结果。
52.根据行驶风险系数、驾驶风险系数和环境风险系数生成综合风险系数,根据综合分析系数筛选预设的推送数据,根据推送数据、行驶风险预测结果、驾驶风险预测结果和环境风险预测结果生成推送信息。例如,当驾驶人员存在不良驾驶行为时,推送信息为当前预测风险为中等,但您存在不良驾驶行为,请注意规范驾驶。
53.采用本方案,分别从车辆行驶、驾驶人员驾驶和环境三大维度进行风险预测,获得相应的风险系数和风险预测结果。通过对多个维度的风险预测进行综合分析,从而实现对车辆行驶过程中的风险进行准确评价。同时,结合综合分析结果筛选对应的推送数据生成推送信息进行推送,从而提醒驾驶人员,辅助驾驶人员进行风险规避。
54.实施例二
55.本实施例与实施例一的不同之处在于:
56.在车辆行驶过程中,除了需要对风险进行预测和规避外,还应提高乘坐人员的乘车体验。
57.本实施例中,基于多维度的风险预测管理系统,还包括乘客分析模块、感知分析模块、标识模块、综合分析模块、行驶分析模块、驱动模块、信号屏蔽模块、数据收集模块、改善分析模块和信息推送模块。
58.车内图像还包含车内乘坐人员的图像数据。乘客分析模块用于根据车内图像对乘坐人员进行身份识别,根据身份识别判断乘坐人员是否为感知敏感人群。具体的,乘客分析模块用于当乘坐人员的身份标识中包括感知敏感标识时,判定乘坐人员为感知敏感人群。
59.感知分析模块用于当乘坐人员为感知敏感人群时,根据车内图像生成感知敏感人群的感知结果;还用于当乘坐人员为非感知敏感人群时,根据车内图像生成乘坐人员的感知结果,感知结果包括是否晕车。
60.身份标识包括感知敏感标识和感知敏感系数,标识模块用于当感知结果为晕车时,更新乘坐人员的身份标识,具体的,标识模块用于当感知结果为晕车时,更新感知敏感系数,判断感知敏感系数是否大于预设的敏感阈值;还用于当感知敏感系数大于预设的敏感阈值时,生成对应乘坐人员的感知敏感标识,反之则不生成。
61.感知敏感系数的更新为:感知敏感系数的初始值为1.5,乘坐人员每发生一次晕车行为,感知敏感系数在其值的基础上乘以1.5,根据计算结果更新感知敏感系数。初始状态下,所有人员的身份标识均无感知敏感标识,即所有人员均为非感知敏感人群,随着乘车次数的增多,部分人员出现晕车行为,每次晕车行为的出现都使得感知敏感系数发生变化,直到感知敏感系数大于敏感阈值,此时对应人员的身份标识中生成了感知敏感标识,该人员为感知敏感人群。
62.综合分析模块用于当乘坐人员为感知敏感人群时,根据行驶数据、感知结果和不良驾驶行为生成驾驶评价结果。当乘坐人员为非感知敏感人群时,根据行驶数据和不良驾驶行为生成驾驶评价结果。
63.针对感知敏感人群进行座椅控制、终端控制和数据收集,从而改善乘坐人员的身
体不适。
64.汽车内具有实现座椅整体前后调节的滑动机构,通过车内按键便能控制滑动机构实现对座椅整体的前后调节。
65.行驶分析模块用于根据行驶数据对行驶速度进行实时分析,生成速度变化结果,速度变化结果包括加速、减速和稳定,具体的,行驶分析模块用于根据行驶数据对行驶速度进行实时分析,生成加速度,当加速度大于预设的速度变化范围时,生成加速的速度变化结果;当加速度小于速度变化范围时,生成减速的速度变化结果;当加速度位于速度变化范围内时,生成稳定的速度变化结果。一定范围内的加速度变化,人体感受不到,默认此加速度范围内变化不会导致乘坐人员身体不适。
66.驱动模块用于根据速度变化结果生成座椅控制数据,根据座椅控制数据控制乘坐人员的座椅移动,座椅控制数据包括前移、后移和居中。具体的,驱动模块用于当速度变化结果为加速时,生成后移的座椅控制数据,控制座椅后移;还用于当速度变化结果为减速时,生成前移的座椅控制数据,控制座椅前移;还用于当速度变化结果为稳定时,生成居中的座椅控制数据,控制座椅移动到滑动机构的居中位置。在其他实施例中,驱动模块还预设有乘坐人员对应的适宜距离,驱动模块用于当速度变化结果为稳定时,生成居中的座椅控制数据,控制座椅移动到乘坐人员对应的适宜距离。
67.在其他实施例中,速度变化结果还包括加速对应的加速度值和减速对应的加速度值,驱动模块用于控制座椅前移和后移时,根据加速度值控制座椅的移动速度。
68.在速度发生较大变化时,座椅与乘坐人员的背部呈相同方向的运动,使得乘坐人员背部受到的压力保持稳定,从而降低乘坐人员对加速及减速的感知,进而减缓加速和减速造成的乘坐人员晕车等身体不适情况,改善乘坐人员的晕车情况。
69.同时,本实施例中,针对私家车的应用场景,在获得授权的情况下,人员乘坐车辆时,自动对乘坐人员的智能终端进行链接,在本实施例中,乘坐人员的智能终端指手机和平板。
70.信号屏蔽模块用于当乘坐人员为感知敏感人群时,生成信号屏蔽信号发送至对应乘坐人员的智能终端,以控制其信号断网。通过限制感知敏感人群玩手机的行为,在一定程度上改善乘坐人员的晕车情况。
71.数据收集模块用于当乘坐人员为感知敏感人群,且对应感知结果为非晕车时,存储行驶数据和车内图像。改善分析模块用于对行驶数据和车内图像进行分析,生成乘坐人员的乘坐习惯,并存储。信息推送模块用于当乘坐人员为感知敏感人群时,调用对应乘坐人员的乘坐习惯并推送。
72.以此,便于驾驶人员得知该感知敏感人群不晕车的乘坐习惯,以此对行驶情况进行控制和调节,从而改善乘坐人员的晕车情况。
73.基于多维度的风险预测管理方法,使用上述基于多维度的风险预测管理系统。
74.以上所述的仅是本发明的实施例,方案中公知的具体结构及特性等常识在此未作过多描述,所属领域普通技术人员知晓申请日或者优先权日之前发明所属技术领域所有的普通技术知识,能够获知该领域中所有的现有技术,并且具有应用该日期之前常规实验手段的能力,所属领域普通技术人员可以在本技术给出的启示下,结合自身能力完善并实施本方案,一些典型的公知结构或者公知方法不应当成为所属领域普通技术人员实施本技术
的障碍。应当指出,对于本领域的技术人员来说,在不脱离本发明结构的前提下,还可以作出若干变形和改进,这些也应该视为本发明的保护范围,这些都不会影响本发明实施的效果和专利的实用性。本技术要求的保护范围应当以其权利要求的内容为准,说明书中的具体实施方式等记载可以用于解释权利要求的内容。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1