一种基于无人机的火灾监控系统的制作方法
1.本发明涉及图像识别技术领域,具体是一种基于无人机的火灾监控系统。
背景技术:
2.物联网火灾预警功能在火灾防控工作中发挥着重要作用,而无人机可以有效协助日常巡检工作,尤其是在人的肉眼看不到的地方,并且可以将警报信息群发报告相关人员;随着科技的进步,无人机在火灾监控的使用中,所能起到的作用也越来越大;现有技术中,通常是在火灾发生后,且通常火灾到达一定规模后才会被发现,使得错过最佳处理时间,如何利用无人机巡航,对指定区域进行监控,从而判断指定区域内是否存在火灾的可能性,是我们需要解决的问题,为此,现提供一种基于无人机的火灾监控系统。
技术实现要素:
3.本发明的目的在于提供一种基于无人机的火灾监控系统。
4.本发明的目的可以通过以下技术方案实现:一种基于无人机的火灾监控系统,包括监控中心,所述监控中心通信连接有数据采集模块、数据处理模块、数据分析模块以及火灾预警模块;所述数据采集模块由若干个具有不同功能的数据采集终端组成,安装在无人机上,用于获取无人机在指定区域内进行巡航时的视频数据;所述数据处理模块用于对数据采集模块所获得的视频数据进行处理,获得指定区域的数字平面模型;所述数据分析模块用于根据所获得的数字平面模型对指定区域内是否存在火灾进行分析,判断指定区域内是否发生火灾;所述火灾预警模块用于根据所接收到的预警信息和火灾报警信息,生成火灾救援指令。
5.进一步的,所述数据采集模块获取视频数据和环境数据的过程包括:通过安装在无人机上的视频数据采集终端,实时获取无人机在对指定区域内进行巡航过程中的视频数据;通过安装在无人机上的环境数据采集终端,实时获取无人机在对指定区域内进行巡航过程中的环境数据;将数据采集模块所获得的无人机在巡航时的数据发送至数据处理模块。
6.进一步的,所述数据处理模块对所获得的视频数据的处理过程包括:设置预设周期t,将所获得的视频数据转化为连续的n个时长为t的视频段;将所获得的每个视频段转化为对应的视频帧图像,并在其中随机选择一个视频帧图像,将所选择的视频帧图像标记为关键帧图像;将所获得的关键帧图像进行标记,并获得该关键帧图像对应的时间;
将所获得的所有关键帧图像输入至cnn特征提取模型内,并获得关键帧图像中的特征值;建立二维坐标系,将指定区域的平面图映射至二维坐标系内;在指定区域内设置若干个参考点,且每个参考点均不相同,分布在指定区域内的各个位置,并获得参考点的特征值;根据每个关键帧图像对应的时间,获取该时间无人机的所在位置,并将无人机的所在位置映射在二维坐标系内;将该时间无人拍摄到的关键帧图像中的各个特征值与各个参考点的特征值进行匹配,根据匹配结果将关键帧图像映射至二维坐标系内的平面图的对应区域,完成对平面图对应的区域的更新;获得更新后的平面图内各个区域的特征值,并建立数字平面模型。
7.进一步的,所述数据分析模块对指定区域内是否发生火灾进行分析的过程包括:设置若干个特征值区间,并将所获得的更新后的平面图内的各个区域的特征值与各个特征值区间进行匹配,并输出匹配结果;根据匹配结果在数字平面模型内将指定区域的环境因素作对应的标记;所述环境因素包括烟雾因素以及火焰因素;若数字平面模型内存在烟雾因素,则获取烟雾因素对应的区域的坐标范围,并将烟雾因素对应的区域的边缘进行标记,获取边缘的坐标集;根据所获得的坐标集,获得烟雾因素对应的区域的中心点,以该中心点为圆心,设置半径为r的圆形区域;将该圆形区域进行标记,并判断圆形区域内是否存在建筑因素,若不存在建筑因素,则生成火灾报警信息;若存在建筑因素,则获取当前时刻是否处于预设时间段范围内,若处于预设时间段范围内,则不生成预警信息,反之则生成预警信息;当存在火焰因素时,将火焰因素对应的区域进行标记,并生成火灾报警信息。
8.进一步的,所述火灾预警模块根据预警信息和火灾报警信息,生成火灾救援指令的过程包括:当接收到预警信息时,则将预警信息发送至监控中心,并将无人机所拍摄到的视频与该预警信息进行关联,由监控中心的管理人员根据视频内容判断是否存在火灾风险,若存在火灾风险,将预警信息转化为火灾报警信息;当接收到火灾报警信息时,生成火灾救援指令,并以火焰因素所在的区域为中心,获取距离该火焰因素距离最近的救援中心,将火灾救援指令发送至该救援中心,同时将该火焰因素对应的区域的位置及前往该火焰因素对应的区域的位置的路线发送至救援中心。
9.进一步的,所述圆形区域覆盖所述烟雾因素对应的区域的坐标范围。
10.与现有技术相比,本发明的有益效果是:通过无人机对指定区域内进行视频数据采集,并根据采集到的视频数据,获得对应的关键视频帧,通过cnn特征提取模型,对关键视频帧内的环境因素进行识别,并根据所识别的环境因素中的烟雾因素和火焰因素,判断是否发生火灾,并在判断发生火灾时,生成对应的火灾预警信息,发送至最近的救援中心,从而实现火灾发生后的快速处理。
附图说明
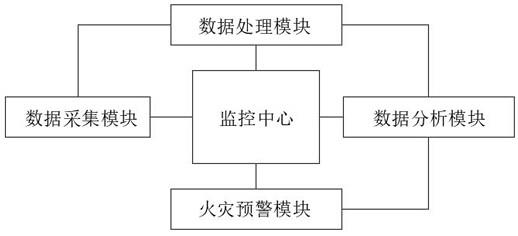
11.图1为本发明的原理图。
具体实施方式
12.如图1所示,一种基于无人机的火灾监控系统,包括监控中心,所述监控中心通信连接有数据采集模块、数据处理模块、数据分析模块以及火灾预警模块;所述数据采集模块由若干个具有不同功能的数据采集终端组成,安装在无人机上,用于获取无人机在指定区域内进行巡航时的视频数据和环境数据,具体过程包括:通过安装在无人机上的视频数据采集终端,实时获取无人机在对指定区域内进行巡航过程中的视频数据;通过安装在无人机上的环境数据采集终端,实时获取无人机在对指定区域内进行巡航过程中的环境数据,所述环境数据包括温度、湿度、风速以及风向;实时获取无人机在对指定区域内进行巡航时的飞行数据,所述飞行数据包括无人机的所在位置和飞行方向;将数据采集模块所获得的无人机在巡航时的数据发送至数据处理模块。
13.所述数据处理模块用于对数据采集模块所获得的数据进行处理;需要进一步说明的是,在具体实施过程中,所述数据处理模块对所获得的视频数据的处理过程包括:设置预设周期t,将所获得的视频数据转化为连续的n个时长为t的视频段;将所获得的每个视频段转化为对应的视频帧图像,并在其中随机选择一个视频帧图像,将所选择的视频帧图像标记为关键帧图像;将所获得的关键帧图像进行标记,并获得该关键帧图像对应的时间;将所获得的所有关键帧图像输入至cnn特征提取模型内,并获得关键帧图像中的特征值;需要进一步说明的是,在具体实施过程中,cnn特征提取模型已提前训练完成;建立二维坐标系,将指定区域的平面图映射至二维坐标系内;需要进一步说明的是,在具体实施过程中,在指定区域内设置若干个参考点,且每个参考点均不相同,分布在指定区域内的各个位置,并获得参考点的特征值;根据每个关键帧图像对应的时间,获取该时间无人机的所在位置,并将无人机的所在位置映射在二维坐标系内;将该时间无人拍摄到的关键帧图像进行标记,并将所获得的关键帧图像中的各个特征值与各个参考点的特征值进行匹配,根据匹配结果将关键帧图像映射至二维坐标系内的平面图的对应区域,完成对平面图对应的区域的更新;需要进一步说明的是,在具体实施过程中,对平面图对应的区域进行更新前,平面图均为未发生火灾情况下的平面图,即默认指定区域的初始状态均为未发生火灾;获得更新后的平面图内各个区域的特征值,并建立数字平面模型,再将所获得的特征值与数字平面模型中的对应的位置相关联,同时将无人机所在位置对应的温度和湿度与数字平面模型中的对应位置相关联,将所获得的数字平面模型发送至数据分析模块。
14.所述数据分析模块用于根据所获得的数字平面模型对指定区域内是否存在火灾进行分析,具体分析过程包括:
设置若干个特征值区间,并将所获得的更新后的平面图内的各个区域的特征值与各个特征值区间进行匹配,并输出匹配结果;需要进一步说明的是,在具体实施过程中,特征值区间会随时时间进行动态变化,即在不同的时间,同一个特征值区间内的特征值范围可以不同;根据匹配结果在数字平面模型内将指定区域的环境因素作对应的标记;需要进一步说明的是,在具体实施过程中,所述环境因素包括植被因素、土壤因素、建筑因素、烟雾因素以及火焰因素等;获取数字平面模型内是否烟雾因素或火焰因素,若存在烟雾因素或火焰因素则将烟雾因素或火焰因素对应的区域进行标记;当存在烟雾因素时,则将烟雾因素对应的区域进行标记,获取烟雾因素对应的区域的坐标范围,并将烟雾因素对应的区域的边缘进行标记,获取边缘的坐标集;根据所获得的坐标集,获得烟雾因素对应的区域的中心点,并将中心点进行标记,以该中心点为圆心,设置半径为r的圆形区域,需要进一步说明的是,在具体实施过程中,该圆形区域覆盖该烟雾因素对应的区域的坐标范围;将该圆形区域进行标记,并获取圆形区域内是否存在建筑因素;需要进一步说明的是,在具体实施过程中,建筑因素对应的区域与该圆形区域存在重叠时,则表示圆形区域内存在建筑因素,反之,若圆形区域不与建筑因素对应的区域存在重叠部分,则表示该圆形区域内不存在建筑因素;若不存在建筑因素,则将烟雾因素对应的区域进行标记,并生成预警信息,将预警信息和被标记的烟雾因素对应的区域发送至火灾预警模块;若存在建筑因素,则获取当前时刻是否处于预设时间段范围内,若处于预设时间段范围内,则不生成预警信息,反之则生成预警信息;需要进一步说明的是,在具体实施过程中,预设时间段根据实际情况,由技术人员进行设置;当存在火焰因素时,将火焰因素对应的区域进行标记,并生成火灾报警信息,将所生成的火灾报警信息和火焰因素对应的区域发送至火灾预警模块。
15.所述火灾预警模块用于根据所接收到的预警信息和火灾报警信息,生成火灾救援指令,具体过程包括:当接收到预警信息时,则将预警信息发送至监控中心,并将无人机所拍摄到的视频与该预警信息进行关联,由监控中心的管理人员根据视频内容判断是否存在火灾风险,若存在火灾风险,将预警信息转化为火灾报警信息;当接收到火灾报警信息时,生成火灾救援指令,并以火焰因素所在的区域为中心,获取距离该火焰因素距离最近的救援中心,将火灾救援指令发送至该救援中心,同时将该火焰因素对应的区域的位置及前往该火焰因素对应的区域的位置的路线发送至救援中心。
16.需要进一步说明的是,在本发明的另一实施例中,所述数据分析模块还用于对指定区域内各个位置可能发生火灾的风险进行评估,具体包括:根据所识别到的环境因素,并将其中易发生火灾的环境因素进行标记;根据所获取到的被标记的环境因素对应的区域的温度和湿度,获得被标记的环境因素对应的区域的火灾发生风险系数;其中火灾发生风险系数与温度呈正相关,与湿度呈反相关,即温度越高,火灾发生风险系数越大,温度越低,火灾发生风险系数越小,湿度越
高,火灾发生风险系数越小,湿度越低,火灾发生风险系数越大;火灾发生风险系数越大,则发生火灾的可能性越大;需要进一步说明的是,在具体实施过程中,所述数据分析模块还用于在发生火灾时,对于火灾的影响范围进行分析,具体过程包括:根据火焰因素的所在区域的风速和风向,对火灾的蔓延速度和蔓延方向进行预估,并根据预估结果,在数字平面模型内将火灾即将蔓延的区域进行标记,并发送至监控中心。
17.以上实施例仅用以说明本发明的技术方法而非限制,尽管参照较佳实施例对本发明进行了详细说明,本领域的普通技术人员应当理解,可以对本发明的技术方法进行修改或等同替换,而不脱离本发明技术方法的精神和范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1