一种考虑动态空间关系的交通流预测方法
1.本发明属于智能交通领域,更具体地,涉及一种考虑动态空间关系的交通流预测方法。
背景技术:
2.随着计算机与信息技术的更新,智能交通系统(intelligent transport system,its)逐渐发展起来。而交通流量预测作为智能交通系统实现的关键受到较高重视,精确的交通流量预测是智能交通系统的基础前提,对于解决城市交通拥堵问题具有显著作用。
3.交通流量的主要特点之一在于不断变化的时间与空间特征:在时间上,交通流量数据表现为较强的周期性特征,受到通勤交通影响,交通流量在工作日一般均会出现早晚高峰现象,而在非工作日,这种现象则不太显著;在空间上,交通网络中的节点之间存在着直接影响与间接影响,直接影响主要受到节点间距离的影响,一般来说,节点间距离越小,节点之间的关联越大,且直接影响是一种相对长期的、稳定的关联。间接影响则主要考虑距离较远节点之间存在的隐藏关联,例如办公区节点与居住区节点可能相距较远,但这两个节点之间交通流量变化可能存在较大关联,而且这种关联也随着时间的改变而不断变化,例如在上下班期间,办公区节点与居住区节点关联性较强,而在其他时段,两节点之间的关联性较弱。因此,如何刻画上述动态变化的时空特征,特别是动态的空间关系,对交通流量预测有重要意义。
4.现有的对交通流动态空间关系的研究,主要体现在对动态空间关系本身的准确描述与计算。如使用动态时间规整算法(dynamic time warping,dtw)算法,计算不同节点采集到的完整的时间序列之间的相关性,将得到的相关性矩阵作为交通网络的动态空间关系,还有学者使用更加复杂的深度学习模型如transformer,通过节点的嵌入特征,计算节点之间的相关性,得到交通网络的动态空间关系。
5.但是,无论使用哪种方式都没有实现真正意义上的动态空间关系,因为上述方法中,以节点上采集到的完整的交通流数据为依据进行相关性计算,并将计算得到的动态空间相关性用于所有时刻的交通流预测,在本质上还是一种静态的空间关系,反映了节点之间的稳定的、长期的相关性,并不能真正体现节点对之间突发的、短暂的相关性,如发生交通事故导致的节点对之间的短暂相关性。
技术实现要素:
6.针对现有技术的以上缺陷或改进需求,本发明提供了一种考虑动态空间关系的交通流预测方法,其目的在于实现对交通流复杂时空特征的准确提取,提升交通流的预测精度。
7.为实现上述目的,本发明提供了一种考虑动态空间关系的交通流预测方法,包括:
8.s1.对交通网络中采集到的数据进行预处理后,划分为训练集、测试集合验证集;
9.s2.构建交通流预测模型;包括时变空间图估计器、动态时空卷积模块;
10.时变空间图估计器,包括时空转换模块、自编码器和输出层;时空转换模块,用于计算当前时间框交通流数据x(t)两两节点之间时序数据的相关性,得到节点之间在当前时段下的时变空间图的初始拓扑结构;自编码器,对初始拓扑结构进行数据降噪与特征学习;输出层,对自编码器学习到的特征进行激活和图归一化,得到时变空间图g
t
;
11.动态时空卷积模块,用于提取空间图g、时变空间图g
t
、以及由当前时间框交通流数据x(t)、一天前待预测时段交通流数据xd(t)和一周前待预测时段交通流数据xw(t)拼接成的三通道数据xs(t)中的动态时空融合特征;
12.s3.采用训练集对交通流预测模型进行迭代训练;
13.s4.将交通网络空间图、待预测时段一小时前交通流数据、一天前交通流数据和一周前交通流数据输入训练好的交通流预测模型,得到交通流预测结果。
14.进一步地,动态时空卷积模块,包括第一时间卷积单元、时变空间图卷积单元、空间图卷积单元、第二时间卷积单元;
15.第一时间卷积单元,提取三通道数据xs(t)的时间特征m;
16.时变空间图卷积单元,根据时变空间图g
t
提取时间特征m中表征时间序列相关性的空间特征,得到动态时空特征;
17.空间图卷积单元,根据空间图g提取时间特征m中表征时间序列相关性的空间特征,得到静态时空特征;
18.第二时间卷积单元,对融合后的动态时空特征与静态时空特征进一步在时间维度上提取特征。
19.进一步地,时变空间图卷积单元中的卷积公式如下:
[0020][0021]
代表图卷积操作,θ表示图卷积的卷积核,为交通网络中所有节点,w
t
为时变空间图g
t
的拓扑结构,θ表示图卷积权重参数。
[0022]
进一步地,空间图卷积单元中的卷积计算公式为:
[0023][0024]
为中间变量。
[0025]
进一步地,第一时间卷积单元学习到的时间特征m为,
[0026]
m=relu(q
⊙
h+p)
[0027]
q为xs(t)
′
的时间维度特征,h为可学习权重参数,p为残差特征。
[0028]
进一步地,采用pearson相关系数计算当前时间框交通流数据x(t)两两节点之间时序数据的相关性。
[0029]
进一步地,所述交通流预测模型还包括残差单元。
[0030]
进一步地,两层动态时空卷积模块级联连接。
[0031]
总体而言,通过本发明所构思的以上技术方案与现有技术相比,能够取得下列有益效果。
[0032]
(1)本发明研究重点不在于计算动态空间关系,而在于设计一种高效、简便的计算交通网络动态空间关系的方法。该方法能够将当前时刻的交通流数据转化为当前时刻的动态空间关系,使得动态空间关系实现了真正意义上的随时间变化,因而能够对于交通网络
中的突发事件或短暂性事件作出灵敏反应,更加精准对交通流进行预测。
[0033]
(2)本发明设计的计算交通网络动态空间关系的方法,并没有使用如dtw或transformer等的复杂算法和模型,而是选择了计算复杂度较低的pearson系数算法和简单的全连接网络模型,该方法不仅能够有效计算交通网络的动态空间关系,而且结构简单,参数量少,因而计算速度较快,模型体积小,也更易于部署。
[0034]
(3)分别根据动态空间关系和静态空间关系对交通流数据进行时空特征提取并将两者进行融合得到时空融合特征,该特征既包含了交通流的长期时空特征,也包含了交通流的短期时空特征,因而更加准确地反映了交通流的真实时空特征,然后使用时间卷积模块进一步对时空融合特征进行特征提取,得到精度更高的交通流预测值。
附图说明
[0035]
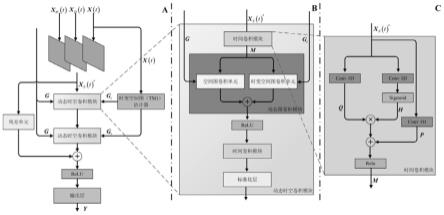
图1为交通流预测模型框架;
[0036]
图2为时变空间图估计器框架;
[0037]
图3为不同模型对于预测时长对预测时长敏感程度;(a)为pemsd8数据集mae误差;(b)为pemsd8数据集rmse误差;(c)为pemsd4数据集mae误差;(d)为pemsd4数据集rmse误差;
[0038]
图4为在两个连续时段上生成的部分节点的时变空间图;(a)为00:00~01:00的时变空间图;(b)为01:00~02:00的时变空间图;
[0039]
图5为消融实验结果;
[0040]
图6为模型短期预测结果;(a)为pemsd4的0号节点工作日预测;(b)为pemsd8的0号节点非工作日预测;
[0041]
图7为模型长期预测结果。
具体实施方式
[0042]
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。此外,下面所描述的本发明各个实施方式中所涉及到的技术特征只要彼此之间未构成冲突就可以相互组合。
[0043]
本发明具体实施方式分为两个阶段:训练阶段与运行阶段。以加州高速路网pems系统采集的交通流量为例说明。
[0044]
在训练阶段包括:需要使用大量已有交通流的长期历史数据,将其按照6:2:2的比例划分为训练集、验证集、测试集。为减弱交通时序数据中的偏大或偏小值对特征学习产生的不利影响,使用z-scores方法对数据进行预处理。本发明提出的模型采用pytorch深度学习框架。模型的输入的时间序列长度t取12,模型预测的未来时间序列长度t
′
取6,即通过过去1小时的交通流数据预测未来半小时的交通流数据。初始学习率设置为0.001,为加快模型收敛速度,使用衰减式学习率调整策略,每经过5轮训练,将学习率缩小为原来的0.7倍,批量大小设置为64。训练迭代次数为100次,使用均方损失函数(mean squared loss,mse)作为训练时的损失函数,采用adam优化器进行神经网络参数的反向传播优化。
[0045]
具体实施方式如下:
[0046]
步骤1:首先对交通网络中节点上采集到的交通流数据进行预处理,处理方式采用
使用z-scores方法对数据进行预处理,具体方法如下:
[0047][0048]
其中,x为训练集的交通流数据,为每个节点上时间序列的均值,为每个节点上时间序列的标准差。
[0049]
数据预处理后,划分为训练集、测试集合验证集;
[0050]
s2.参考图1,构建交通流预测模型;包括时变空间图估计器、动态时空卷积模块;
[0051]
参考图2,时变空间图估计器,包括时空转换模块、自编码器和输出层;时空转换模块,用于计算当前时间框交通流数据x(t)两两节点之间时序数据的相关性,得到节点之间在当前时段下的时变空间图的初始拓扑结构;自编码器,对初始拓扑结构进行数据降噪与特征学习;输出层,对自编码器学习到的特征进行激活和图归一化,得到时变空间图g
t
;当前时间窗的采集数据x(t)首先进入tsg估计器的时空转换模块,即把包含时间与空间维度的信息x(t)转换为只包含空间维度的信息可以视为时变空间图的初始拓扑结构,作为特征学习的初始解,其中,为减小模型复杂度,提升算法计算速度,转换方法采用pearson相关系数衡量时序数据相关性,其计算方式如下:
[0052][0053]
时变空间图的初始拓扑结构a(t)进入自编码器结构进行数据降噪与特征学习,编码器和解码器均由线性层构成,经过自编码器后,使用softmax作为激活函数,得到
[0054]
为便于时变空间图进行图卷积运算,在时变空间图估计器中加入图归一化层,通过图归一化层计算的归一化矩阵w
t
,具体如下:
[0055][0056]
其中,
[0057]
动态时空卷积模块,用于提取空间图g、时变空间图g
t
、以及由当前时间框交通流数据x(t)、一天前待预测时段交通流数据xd(t)和一周前待预测时段交通流数据xw(t)拼接成的三通道数据xs(t)中的动态时空融合特征;
[0058]
为充分利用交通数据的周期性特征,模型输入端除了当前时间窗内的采集数据x(t)以外,还引入了与当前时间窗对应的近期时间片段和远期时间片段,分别记为
和其中近期时间片段采集规则为一天前待预测时段的交通流量,远期时间片段采集规则为一周前待预测时段的交通流量,x(t)、xd(t)、xw(t)被视为输入的三个通道,最终形成模型输入,记为其中ci为输入的通道数,在本发明实施例中ci=3;
[0059]
参考图1中b部分,动态时空卷积模块包括第一时间卷积单元、时变空间图卷积单元、空间图卷积单元和第二时间卷积单元;第一时间卷积单元,提取三通道数据xs(t)的时间特征m;时变空间图卷积单元,根据时变空间图g
t
提取时间特征m中表征时间序列相关性的空间特征,得到动态时空特征;空间图卷积单元,根据空间图g提取时间特征m中表征时间序列相关性的空间特征,得到静态时空特征;第二时间卷积单元,对融合后的动态时空特征与静态时空特征进一步在时间维度上提取特征;使用层标准化(layer norm)方法对数据行进行标准化,弱化不同节点的时序数据之间的大小关系,同时保留每个节点上的时序数据的相对大小关系,保证特征分布的稳定性;
[0060]
时变空间图卷积单元、空间图卷积单元的计算原理相同,均使用了基于谱域的图卷积网络(graph convolutional network,gcn)进行空间特征的提取。
[0061]
定义在谱域上的卷积公式如下:
[0062][0063]
其中代表图卷积操作,图卷积的卷积核为θ,为交通网络中所有节点在某一时段采集到的交通流量。归一化的拉普拉斯矩阵其中in为单位矩阵,为图的度矩阵w为图的加权邻接矩阵。傅里叶基由归一化的拉普拉斯矩阵l的特征向量构成,是由归一化的拉普拉斯矩阵l的特征值构成的对角矩阵。
[0064]
随着图上的节点个数的增加,标准化的拉普拉斯矩阵的尺寸也在增加,因此求解其对应的特征分解需要花费巨大的计算资源,因此可以采用k阶切比雪夫多项式进行近似求解,降低时间算法复杂度。
[0065][0066]
其中λ
max
为l的最大特征值,为k阶切比雪夫多项式在处的值,θk为多项式系数。则式(4)可被简化为:
[0067][0068]
切比雪夫多项式tk(x)满足:
[0069]
t0(x)=1,t1(x)=x,tk(x)=2xt
k-1
(x)-t
k-2
(x) (7)
[0070]
使用一阶切比雪夫多项式对式(6)进行近似得:
[0071][0072]
由于神经网络中存在归一化与标准化层,我们可以假设λ
max
≈2,为
卷积核中的共享参数,其中,cs为空间卷积通道数,为了降低参数量防止过拟合现象发生,令则式(8)可简化为:
[0073][0074]
其中,
[0075]
在空间图卷积模块中,式(9)中的由交通网络的空间图的拓扑结构w所确定,不随时间变化,是相对固定的。在时变空间图卷积模块中,使用时变空间图估计器得到的时变空间图g
t
(v,e
t
,w
t
)的拓扑结构w
t
来替代式(9)中的即在时变空间图卷积模块中的卷积公式如下:
[0076][0077]
参考图1中c部分,时间卷积单元主要通过卷积网络实现,并通过设置合适的padding参数,保证卷积操作前后时序数据的长度不变。时间卷积单元的输入首先通过调整数据维度变为图1中c部分左上卷积层用于提取输入xs(t)
′
的在时间维度特征,输出记为其中c
t
表示时间卷积通道数。输入xs(t)
′
经过图1中c部分右上的卷积层后再通过sigmoid函数激活,输出记为根据激活函数特性可知,h中的元素均在0到1之间,因此h作为0对q进行调整,即将q与h进行矩阵的点乘运算。图1中c部分右下的卷积层作为残差单元,实现加速训练和防止梯度消失的目的,最后使用relu函数激活并输出,则通过一个时间卷积模块学习到的时间特征可以表示为:
[0078]
m=relu(q
⊙
h+p)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(11)
[0079]
其中,q=w1*xs(t)
′
+b1,h=w2*xs(t)
′
+b2,p=σ(w3*xs(t)
′
+b3),w2、w2、w3为卷积核的权重参数,*为卷积操作,b1、b2、b3为偏置权重,σ为sigmoid激活函数,
⊙
为矩阵点乘运算。通过relu函数引入非线性成分,更好的表示交通流在时域上的非线性特征。
[0080]
s3.采用训练集对交通流预测模型进行迭代训练;
[0081]
s4.将交通网络空间图、待预测时段一小时前交通流数据、一天前交通流数据和一周前交通流数据输入训练好的交通流预测模型,得到交通流预测结果;
[0082]
为评估本发明提出模型的性能,本发明中采用平均绝对误差(mean absolute error,mae)、均方根误差(root mean square error,rmse)、加权平均绝对百分比误差(weighted mean absolute percentage error,wmape)三个指标进行评估,具体计算方式如下:
[0083][0084]
[0085][0086]
其中,yi为真实值,为预测值。
[0087]
为评估本发明提出模型的预测性能,选取以下模型进行对比,其中包括传统的预测方法、传统机器学习模型以及近期较为流行的深度学习模型:
[0088]
ha:历史均值法,使用过去一段时间观测值的平均值作为预测未来一个时间步长的交通流量。本发明使用过去一小时交通流量预测未来五分钟交通流量。
[0089]
svr:支持向量回归法,选取适当的核函数,通过最小化总损失和最大化间隔来得出优化后的模型。本发明使用径向基函数作为核函数进行预测。
[0090]
stgcn:使用一维卷积神经网络进行时间特征提取,使用基于谱域的图卷积网络进行空间特征提取,两者交替进行。本发明设置时间卷积通道数为64,空间卷积通道数为16,batch size为64,时间卷积核大小为1
×
3。
[0091]
astgcn:在时空卷积网络的基础上,通过引入时空注意力模块更好的捕捉交通流的时空特征。本发明设置时间卷积通道数为64,空间卷积通道数为64,batch size为64,时间卷积核大小为1
×
3。
[0092]
stsgcn:使用时空同步建模机制有效捕捉复杂的局部时空相关性。本发明设置空间卷积通道数为64,batch size为32,每个时空网络序列包含3个时空网络。
[0093]
在pems04和pems08两个数据集上得到的实验结果如表1、表2所示:
[0094]
表1.pemsd4数据集实验结果
[0095][0096]
表2.pemsd8数据集实验结果
[0097]
[0098][0099]
为进一步检测模型在中短期预测中的性能,并评估模型对于预测时长的敏感程度,本发明在两个数据集上,预测未来5分钟至30分钟的预测交通流量。如图3中(a)-(d)所示。本发明所提出的模型在中短期交通流预测中,与其他模型相比,在mae和rmse指标上具有显著的优势,由图3中(a)-(d)曲线的走向可以看出,随着预测时长的增加,六种模型的预测误差均呈上升趋势,这是由于预测时长的增加,导致预测难度增大;由图3中(a)-(d)曲线的斜率可以看出,随着预测时长的增加,本发明提出模型的预测性能衰减最为缓慢,反映出该模型在中长期预测中的巨大潜力。
[0100]
为验证tsg估计器的性能,使用热力图展示了tsg估计器生成的0~19号共20个节点在2018年2月17日00:00~01:00和01:00~02:00两个连续时段的时变空间图,热力图深度反映了节点对之间的相关程度,如图4所示,对比图4中(a)、(b)可知,tsg估计器生成的两个连续时段时变空间图在整体上具有相似性,表明tsg估计器能够较为平滑地生成实时的空间拓扑结构,这反映了相邻时段的空间拓扑结构不会产生较大突变。但对于某些节点对来说,在不同时刻节点对之间的权重发生了变化,如图4中的黑色线框圈中区域,这种变化反映了在某个时段局部节点对之间出现了突发的、短期的空间关系。例如,某个节点附近出现了交通事故,这种突发事件将会对其他临近节点交通流造成短期影响。
[0101]
为验证时变空间图对于交通流预测的有效性,对tsg估计器模块进行消融实验,结果如图5所示,通过分析图5可知,时变空间图的引入对于降低模型的预测误差具有显著作用,并且随着预测时长的增加,柱状图的高度差逐渐增大,反映了时变空间图在交通流的中长期预测中发挥了更加重要的作用。
[0102]
为可视化展示模型的预测效果,选取pemsd4和pemsd8数据集的0号节点进行为期一天的预测如图6中(a)-(b)所示,可以看出,本发明所提出的模型总体上能够有效捕捉交通流的时间特征,图6中(a)展示了模型在工作日的预测效果,由于在工作日中,通勤交通对交通流变化产生重要影响,直观表现为工作日中交通流量的早晚高峰现象,dystgcn能够有效捕捉到这种交通流变化模式,并可以比较准确地预测早晚高峰发生的时刻。图6中(b)展示了模型在非工作日的预测效果,由于在非工作日,则基本不存在通勤交通,所以流量并不会出现早晚高峰现象,而是表现为“单峰”,这与城市居民的生活习惯息息相关,一般来说,有出行需求的居民大多在上午的9点至下午的9点会参与交通活动,其余时间则较少,dystgcn可以有效预测非工作日的交通流变化趋势,并给出较为准确的预测结果。
[0103]
为进一步展示模型对交通流长期的预测效果,在pemsd4数据集上,预测2018年2月18日至2月24日为期七天的交通流量,如图7所示。由图7可以看出,模型能够很好地捕捉到交通流长期的变化特征,能够连续不间断的对交通流进行长期预测,且实现了较为精确的预测效果。
[0104]
在运行阶段则是指的将训练阶段得到的预测性能足够好、预测稳定性较高的模型部署到智慧城市管理系统上,实现全市交通流的实时预测。
[0105]
本领域的技术人员容易理解,以上所述仅为本发明的较佳实施例而已,并不用以
限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1