基于FLOYD的室内停车场寻路系统、方法及设备与流程
基于floyd的室内停车场寻路系统、方法及设备
技术领域
1.本发明涉及路径规划领域,特别涉及基于floyd的室内停车场寻路系统、方法及设备。
背景技术:
2.随着现代化的生活不断进步,平时的日常生活中车流量越来越大,导致各室内停车场内的位置越来越紧张,经常有车辆进入停车场之后无法快速找到空车位的情况,在寻找车位上浪费了大量的时间。因此如何在进入停车场后快速找到空车位成为本领域的研究重点。
3.目前车辆在进入停车场寻找停车位主要依靠车主对停车场范围的可见性以及对停车场情况的熟悉度。但是由于停车场存在很多转角,驾驶者很难观察到转角后的情况,因此很容易在车辆使过转角后发生拥堵或转角后并没有空停车位,导致车辆需要掉头重新寻找,从而导致车辆在停车场内寻找空车位行驶路径长,同时浪费了时间。
技术实现要素:
4.本发明目的是为了解决目前在停车场内寻找空车位时车辆行驶路径长,时间多的问题,而提出了基于floyd的室内停车场寻路系统。
5.基于floyd的室内停车场寻路系统,包括:车位信息获取单元、空车位判断单元、最短距离车位获取单元、信息输出单元;
6.所述车位信息获取单元用于获取停车场内各车位的位置信息,从而获得各车位之间的距离;
7.所述空车位判断单元用于判断各车位是否为空车位;
8.所述最短距离车位获取单元用于获取车辆当前位置与各空车位之间的距离,并获取距离车辆当前位置路程最短的空车位;
9.所述信息输出单元用于输出距离车辆当前位置距离最短的空车位及路径。
10.进一步地,所述获取停车场内各车位的位置信息采用uwb技术实现。
11.进一步地,所述获取距离车辆当前位置路程最短的空车位采用floyd算法实现,具体为:
12.首先,获取车辆当前位置v0直接到达每个空车位的距离d1,d2,....,dn,并获取d1,d2,....,dn中的最小值di对应的除v0外的另一个顶点vi;
13.其中,di=e[v0][vi]为v0到空车位vi的距离,i∈[1,n],n是空闲车位总数;
[0014]
若v0无法直接到达某个空车位,则记录v0与该空车之间的距离为正无穷;
[0015]
然后,遍历除vi外的其他空车位w,获取v0经过w到达vi的距离dj=e[v0][w]+e[w][vi];
[0016]
最后,比较dj与di的大小,若dj<di则获取当前dj对应的路径即距离车辆当前位置路程最短的空车位,同时将中间节点w保存到path[v0][vi]中。
[0017]
基于floyd的室内停车场寻路方法,包括以下步骤:
[0018]
s1、获取停车场内各车位的位置信息,从而获得各车位的之间的距离;
[0019]
s2、判断各车位是否为空车位;
[0020]
s3、获取车辆当前位置与各空车位之间的距离,并利用车辆当前位置与各空车位之间的距离和s1获取的各车位之间的距离,采用floyd算法获取距离车辆当前位置路程最短的空车位。
[0021]
进一步地,所述s3中的采用floyd算法获取距离车辆当前位置路程最短的空车位,具体为:
[0022]
s301、获取车辆当前位置v0直接到达每个空车位的距离d1,d2,....,dn,并获取d1,d2,....,dn中的最小值di对应的除v0外的另一个顶点vi;
[0023]
其中,di=e[v0][vi]为v0到空车位vi的距离,i∈[1,n],n是空闲车位总数;
[0024]
若v0无法直接到达某个空车位,则记录v0与该空车之间的距离为正无穷;
[0025]
然后,遍历除vi外的其他空车位w,获取v0经过w到达vi的距离dj=e[v0][w]+e[w][vi];
[0026]
最后,比较dj与di的大小,若dj<di则获取当前dj对应的路径即距离车辆当前位置路程最短的空车位,同时将中间节点w保存到path[v0][vi]中。
[0027]
一种基于floyd的室内停车场寻路设备,包括处理器和存储器,所述存储器中存储有至少一条指令,所述至少一条指令由处理器加载并执行以实现所述的基于floyd的室内停车场寻路方法。
[0028]
本发明的有益效果为:
[0029]
本发明可以精确并快速的获得空车位的信息,节省了进入停车场后寻找空车位的时间。本发采用uwb(超宽带)技术进行室内定位,降低了系统复杂度,发射信号功率谱密度、对信道衰落的敏感度,截获能力,同时提高了定位精度高。本发明适用于室内等密集多径场所,大大加强了获取车位信息的准确度并将车辆正确引导向空车位,缩短了车辆寻找空车位的行车路径。
附图说明
[0030]
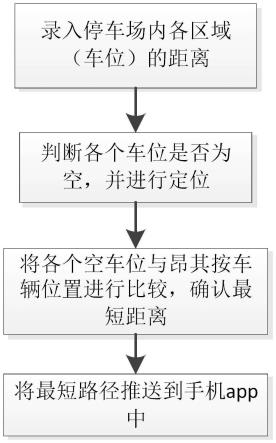
图1为系统流程图;
[0031]
图2为floyd算法流程图。
具体实施方式
[0032]
具体实施方式一:如图1所示,本实施方式基于floyd的室内停车场寻路系统,包括:车位信息获取单元、空车位判断单元、最短距离车位获取单元、信息输出单元;
[0033]
所述车位信息获取单元用于采用uwb(超宽带)技术获取停车场内各车位的位置信息,从而获得各车位的之间的距离;
[0034]
所述空车位判断单元用于判断各车位是否为空车位;
[0035]
所述最短距离车位获取单元用于获取车辆当前位置与各空车位之间的距离,并采用floyd算法获取距离车辆当前位置路程最短的空车位;
[0036]
所述信息输出单元用于将距离车辆当前位置距离最短的空车位及路径输出到手
机app中。
[0037]
具体实施方式二:如图2所示,所述最短距离车位获取单元用于获取车辆当前位置与各空车位之间的距离,并采用floyd算法获取距离车辆当前位置路程最短的空车位,具体为:
[0038]
首先,获取车辆当前位置v0直接到达每个空车位的距离d1,d2,....,dn,并获取d1,d2,....,dn中的最小值di对应的除v0外的另一个顶点vi;
[0039]
其中,di=e[v0][vi]为v0到空车位vi的距离,i∈[1,n],n是空闲车位总数;
[0040]
若v0无法直接到达某个空车位,则记录v0与该空车之间的距离为正无穷;
[0041]
然后,遍历除vi外的其他空车位w,获取v0经过w到达vi的距离dj=e[v0][w]+e[w][vi];
[0042]
最后,比较dj与di的大小,若dj<di则获取当前dj对应的路径即距离车辆当前位置路程最短的空车位,同时将中间节点w保存到path[v0][vi]中。
[0043]
具体实施方式三:基于floyd的室内停车场寻路包括以下步骤:
[0044]
s1、采用uwb(超宽带)技术获取停车场内各车位的位置信息,从而获得各车位的之间的距离;
[0045]
s2、判断各车位是否为空车位;
[0046]
s3、获取车辆当前位置与各空车位之间的距离,并利用车辆当前位置与各空车位之间的距离和s1获取的各车位之间的距离采用floyd算法获取距离车辆当前位置路程最短的空车位,具体为:
[0047]
s301、获取车辆当前位置v0直接到达每个空车位的距离d1,d2,....,dn,并获取d1,d2,....,dn中的最小值di对应的除v0外的另一个顶点vi;
[0048]
其中,di=e[v0][vi]为v0到空车位vi的距离,i∈[1,n],n是空闲车位总数;
[0049]
若v0无法直接到达某个空车位,则记录v0与该空车之间的距离为正无穷;
[0050]
然后,遍历除vi外的其他空车位w,获取v0经过w到达vi的距离dj=e[v0][w]+e[w][vi];
[0051]
最后,比较dj与di的大小,若dj≤di则获取当前dj对应的路径即距离车辆当前位置路程最短的空车位,同时将中间节点w保存到path[v0][vi]中。
[0052]
具体实施方式四:一种基于floyd的室内停车场寻路设备,包括处理器和存储器,所述存储器中存储有至少一条指令,所述至少一条指令由处理器加载并执行以实现所述的基于floyd的室内停车场寻路方法。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1