一种变压器内部检测机器人的制作方法
1.本实用新型涉及一种变压器内部检测机器人,属于变压器检测技术领域。
背景技术:
2.在大型变压器内部灌满用来绝缘、散热和消弧的透明的方棚油,在方棚油抽出来前,人员无法直接进入变压器内部去检测元件是否无损、松动、生锈等。传统的处理方式是先停电将方棚油抽出,人员穿戴防护服后再进入,里面无光线、不通风,人员检测和维修都极其不方便,且耗时费力,仅将方棚油抽出就要花费1~2天时间,加上检修以及再将方棚油注入都需要大量时间和精力,会给用电单位带来较大的损失和不便。
3.为了解决以上困难,现设计一种变压器内部检测机器人,在不需要将方棚油抽出的状态下,在变压器室外通过遥控操作机器人进行变压器内部检测,查找故障源,省时省力,节约成本。
技术实现要素:
4.发明目的:针对现有技术存在的问题,本实用新型提供一种变压器内部检测机器人,能够在不需要将方棚油抽出的状态下,在变压器室外通过遥控操作机器人进行变压器内部检测,省时省力,节约成本,具有结构简单、操作方便、密封性好等特点。
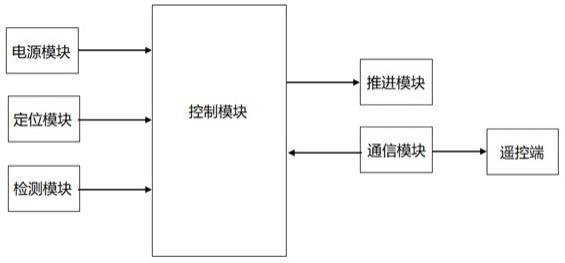
5.技术方案:为实现上述目的,本实用新型提供一种变压器内部检测机器人,包括探测主体,且探测主体上布置有推进模块、定位模块、检测模块、电源模块、控制模块和通信模块;
6.所述推进模块包括布置于探测主体上的水平推进器和竖直推进器,用于驱动探测主体实现前进、后退、上升、下降或转向等操作,所述定位模块用于检测探测主体在变压器内部的位置,所述检测模块用于检测变压器内部元件的工作状态,所述控制模块用于接收定位模块和检测模块的检测信号并实现推进模块的驱动控制,所述通信模块用于实现控制模块与远程控制端的无线信号传输。
7.进一步的,所述探测主体包括上下密封连接的圆弧形顶盖和底部舱体,采用这种结构设计有利于减小液体阻力,从而实现检测机器人在油面下的灵活操作,节能高效。
8.进一步的,所述底部舱体的左右两侧开设有用于布置水平推进器的第一柱形槽,且探测主体的前后两侧开设有用于布置竖直推进器的第二柱形槽。采用这种结构设计有利于减小检测机器人的体积,同时结构布置合理,尽可能地降低水平推进器和竖直推进器之间的气流扰动影响,避免导致推进效率降低。
9.进一步的,所述定位模块包括布置于底部舱体外壁上的超声波探测传感器,通过超声波探测实现检测机器人在变压器内部的定位感知。
10.进一步的,所述检测模块包括布置于底部舱体外壁上的探照灯和摄像头,通过探照灯给检测机器人提供光照,从而有利于摄像头获得更加清晰的图像信息,进而使得外部人员能够更加清晰地了解到变压器内部元件的工作状态。
11.进一步的,所述底部舱体的外壁上布置有防水充电口、防水开关,两者分别与电源模块、控制模块电连接,在确保密封性的基础上实现检测机器人的充电和开关功能。
12.进一步的,所述圆弧形顶盖的中心处设有挂环槽,便于实现机器人的提升和下放。
13.进一步的,所述底部舱体的底部设有圆弧形支脚,有利于实现检测机器人在非探测状态下的稳定支撑。
14.有益效果:本实用新型提供的一种变压器内部检测机器人,一方面基于远程遥控,通过舱体内的控制模块驱动水平推进器和竖直推进器实现检测机器人多角度的位姿控制,另一方面通过定位模块和检测模块实时获取变压器内部的位置信号和状态信号,进而将检测信号传输至外部监控设备。由此,该检测机器人能够在不排空变压器油的前提下,实现对变压器内部元件工作状态的实时检测,省时省力,节约成本,具有结构简单、操作方便、密封性好等特点。
附图说明
15.图1为本实用新型实施例中检测机器人的组成框图;
16.图2为本实用新型实施例中检测机器人的主视图;
17.图3为本实用新型实施例中检测机器人的左视图;
18.图4为本实用新型实施例中检测机器人的俯视图;
19.图5为本实用新型实施例中检测机器人的轴测图;
20.图中包括:1、圆弧形顶盖,101、挂环槽,2、底部舱体,201、第一柱形槽,202、第二柱形槽,203、圆弧形支脚,3、水平推进器,4、竖直推进器,5、超声波探测传感器,6、led灯,7、摄像头,8、防水充电口,9、防水开关,10、推进器线束防水接头。
具体实施方式
21.下面将结合附图对本实用新型的优选实施方式进行描述,更加清楚、完整地阐述本实用新型的技术方案。
22.如图1所示为一种变压器内部检测机器人,包括探测主体,且探测主体上布置有推进模块、定位模块、检测模块、电源模块、控制模块和通信模块;
23.其中推进模块包括布置于探测主体上的水平推进器3和竖直推进器4,用于驱动探测主体实现前进、后退、上升、下降或转向等操作,定位模块用于检测探测主体在变压器内部的位置,检测模块用于检测变压器内部元件的工作状态,控制模块用于接收定位模块和检测模块的检测信号并实现推进模块的驱动控制,通信模块用于实现控制模块与远程控制端的无线信号传输(如wifi或蓝牙通信),电源模块用于实现各模块供电。
24.如图2-5所示,探测主体包括通过防水螺钉上下密封连接的圆弧形顶盖1和底部舱体2,采用这种流线型结构设计有利于减小液体阻力,从而实现检测机器人在油面下的灵活操作,节能高效。
25.进一步的,底部舱体2的左右两侧开设有用于布置水平推进器3的第一柱形槽201,且探测主体的前后两侧开设有用于布置竖直推进器4的第二柱形槽202(贯通圆弧形顶盖1和底部舱体2)。
26.采用这种结构设计有利于减小检测机器人的体积,并为推进器装置提供有效的保
护,同时结构布置合理,尽可能地降低水平推进器和竖直推进器之间的气流扰动影响,避免导致推进效率降低。此外,底部舱体2外壁上布置有推进器线束防水接头10,用于确保接头处的防水密封性。
27.本实施例中,定位模块包括布置于底部舱体2外壁上的超声波探测传感器5,通过超声波探测实现检测机器人在变压器内部的定位感知;检测模块包括布置于底部舱体2外壁上的高亮led灯6和高清摄像头7,通过led灯给检测机器人提供光照,从而有利于摄像头获得更加清晰的图像信息,进而使得外部人员能够更加清晰地了解到变压器内部元件的工作状态。
28.进一步的,底部舱体的外壁上布置有防水充电口8、防水开关9,两者分别与电源模块、控制模块电连接,在确保密封性的基础上实现检测机器人的充电和开关功能。
29.进一步的,圆弧形顶盖1的中心处设有挂环槽101,便于实现检测机器人的提升和下放;底部舱体2的底部设有圆弧形支脚203,有利于实现检测机器人在非探测状态下的稳定支撑。
30.检测时,工作人员通过无线通信实现检测机器人的远程遥控,一方面通过舱体内的控制模块驱动水平推进器和竖直推进器实现检测机器人的位姿控制,另一方面通过定位模块和检测模块实时获取变压器内部的位置信号和状态信号,由此在不排空变压器油的前提下,实现对变压器内部元件工作状态的实时检测,省时省力,节约成本,具有结构简单、小巧方便、自由度高、密封性好等特点。
31.上述具体实施方式仅仅对本实用新型的优选实施方式进行描述,而并非对本实用新型的保护范围进行限定。在不脱离本实用新型设计构思和精神范畴的前提下,本领域的普通技术人员根据本实用新型所提供的文字描述、附图对本实用新型的技术方案所作出的各种变形、替代和改进,均应属于本实用新型的保护范畴。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1