一种单行道逆行超车报警方法及系统与流程
本发明属于智能驾驶,尤其涉及一种单行道逆行超车报警方法及系统。
背景技术:
1、随着车辆的拥有量越来越高,开车出行的几率也越来越高,且随着汽车保有量的增加,开车出行时拥堵的情况发生的几率也比较高。在城市道路或者国道时,遇到单行道的几率也比较高,当前车速度比较慢时,很多人开车时想超车,因为是单行道,超车时,只能选择去邻道的车道逆行超车。单行车道的逆行超车,是非常危险的举动,在交通规则上通常是禁止的,这种逆行超车若发生交通事故,一般都会比较严重。针对这种逆行超车的行为,目前各个车型的主要解决方案为:(1)大部分车辆不监控逆行超车行为,只是会检测前方车辆的危险程度,当判断危险时,仪表上进行危险报警(fcw功能),当判断危险无法避免时,aeb就开始介入,降低车辆碰撞时的相对速度;(2)有些车辆能检测逆行超车行为,但是仅仅是在检测到逆行超车行为后,发出声光报警,进行提示。
2、因此,现有技术具有以下缺陷:(1)常规车型采用fcw和aeb的方案,主要是针对前方跟车时的方案,并且aeb响应时一般都是到最后车辆无法避免碰撞时才会响应,针对逆行超车的警示,一般也不会单独做算法去单独开发,因此对于这种单行车道逆行超车的情况响应不是太好;(2)现有的逆行超车检测与报警,只是发出声光报警,对车辆没有给出更多的选择提示,并不能起到很好的作用,还是容易跟对向来车发生碰撞,或者与本车道的车辆发生剐蹭事故。
技术实现思路
1、本发明实施例的目的在于提供一种单行道逆行超车报警方法及系统,旨在解决背景技术中提出的问题。
2、为实现上述目的,本发明实施例提供如下技术方案:
3、一种单行道逆行超车报警方法,所述方法具体包括以下步骤:
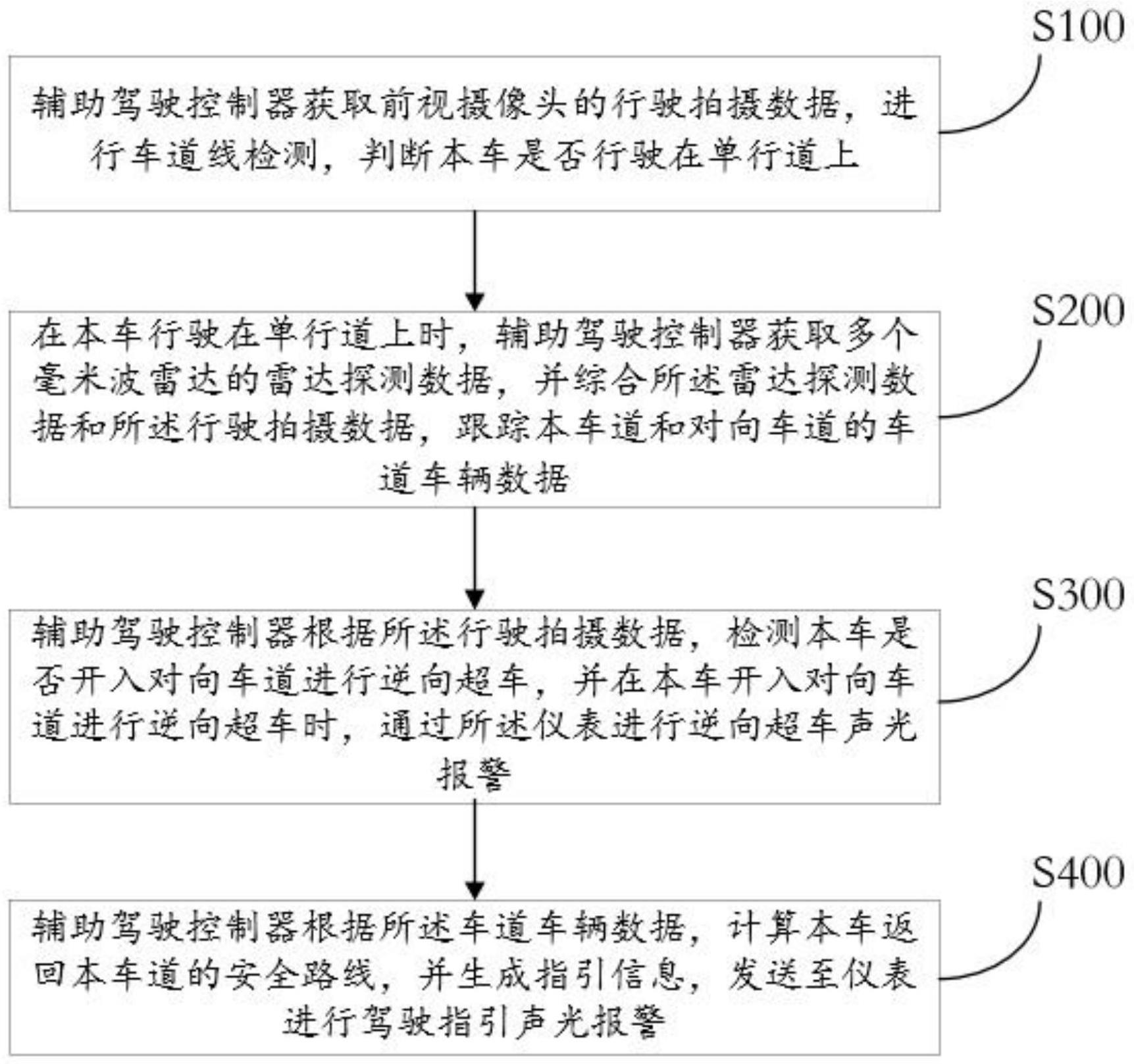
4、辅助驾驶控制器获取前视摄像头的行驶拍摄数据,进行车道线检测,判断本车是否行驶在单行道上;
5、在本车行驶在单行道上时,辅助驾驶控制器获取多个毫米波雷达的雷达探测数据,并综合所述雷达探测数据和所述行驶拍摄数据,跟踪本车道和对向车道的车道车辆数据;
6、辅助驾驶控制器根据所述行驶拍摄数据,检测本车是否开入对向车道进行逆向超车,并在本车开入对向车道进行逆向超车时,通过所述仪表进行逆向超车声光报警;
7、辅助驾驶控制器根据所述车道车辆数据,计算本车返回本车道的安全路线,并生成指引信息,发送至仪表进行驾驶指引声光报警。
8、作为本发明实施例技术方案进一步的限定,所述在本车行驶在单行道上时,辅助驾驶控制器获取多个毫米波雷达的雷达探测数据,并综合所述雷达探测数据和所述行驶拍摄数据,跟踪本车道和对向车道的车道车辆数据具体包括以下步骤:
9、在本车行驶在单行道上时,辅助驾驶控制器获取多个毫米波雷达的雷达探测数据;
10、辅助驾驶控制器综合所述雷达探测数据和所述行驶拍摄数据,识别对向车道的对向来车和本车道的同向来车;
11、辅助驾驶控制器综合所述雷达探测数据和所述行驶拍摄数据,跟踪所述对向来车的对向车辆数据和所述同向来车的同向车辆数据;
12、辅助驾驶控制器根据所述对向车辆数据和所述同向车辆数据,得到本车道和对向车道的车道车辆数据。
13、作为本发明实施例技术方案进一步的限定,多个所述毫米波雷达包括左前毫米波雷达、左后毫米波雷达、右前毫米波雷达和右后毫米波雷达。
14、作为本发明实施例技术方案进一步的限定,所述辅助驾驶控制器根据所述行驶拍摄数据,检测本车是否开入对向车道进行逆向超车,并在本车开入对向车道进行逆向超车时,通过所述仪表进行逆向超车声光报警具体包括以下步骤:
15、辅助驾驶控制器根据所述行驶拍摄数据,检测本车是否开入对向车道进行逆向超车;
16、在本车开入对向车道进行逆向超车时,辅助驾驶控制器向仪表发送逆向超车警示指令;
17、仪表根据所述逆向超车警示指令,进行逆向超车声光报警。
18、作为本发明实施例技术方案进一步的限定,所述辅助驾驶控制器根据所述行驶拍摄数据,检测本车是否开入对向车道进行逆向超车,并在本车开入对向车道进行逆向超车时,通过所述仪表进行逆向超车声光报警还包括以下步骤:
19、在本车开入对向车道进行逆向超车时,辅助驾驶控制器向车身控制模块发送普通警示指令,通过车身控制模块进行双闪警示;
20、在本车与对向车道的对向来车具有碰撞风险时,辅助驾驶控制器向车身控制模块发送危险警示指令,通过车身控制模块进行远光灯闪烁警示。
21、作为本发明实施例技术方案进一步的限定,所述辅助驾驶控制器根据所述车道车辆数据,计算本车返回本车道的安全路线,并生成指引信息,发送至仪表进行驾驶指引声光报警具体包括以下步骤:
22、辅助驾驶控制器根据所述车道车辆数据,计算本车返回本车道的安全路线;
23、辅助驾驶控制器根据所述安全路线,生成对应的指引信息;
24、辅助驾驶控制器将所述指引信息发送至仪表;
25、仪表根据所述指引信息,进行对应的驾驶指引声光报警。
26、作为本发明实施例技术方案进一步的限定,所述安全路线具体包括:超车返回本车道、减速返回本车道、直接返回本车道和禁止返回本车道。
27、一种单行道逆行超车报警系统,所述系统包括前视摄像头、仪表、辅助驾驶控制器和多个毫米波雷达,其中:
28、前视摄像头,用于进行行驶拍摄,得到行驶拍摄数据;
29、毫米波雷达,用于进行雷达探测,生成雷达探测数据;
30、仪表,用于进行逆向超车声光报警;进行驾驶指引声光报警;
31、辅助驾驶控制器,用于获取前视摄像头的行驶拍摄数据,进行车道线检测,判断本车是否行驶在单行道上;在本车行驶在单行道上时,获取多个毫米波雷达的雷达探测数据,并综合所述雷达探测数据和所述行驶拍摄数据,跟踪本车道和对向车道的车道车辆数据;根据所述行驶拍摄数据,检测本车是否开入对向车道进行逆向超车;根据所述车道车辆数据,计算本车返回本车道的安全路线,生成指引信息,并发送至仪表。
32、作为本发明实施例技术方案进一步的限定,所述系统还包括:
33、车身控制模块,用于进行双闪警示;进行远光灯闪烁警示。
34、作为本发明实施例技术方案进一步的限定,多个所述毫米波雷达包括左前毫米波雷达、左后毫米波雷达、右前毫米波雷达和右后毫米波雷达。
35、与现有技术相比,本发明的有益效果是:
36、1、本发明能够检测驾驶员是否在单行道逆行,当检测到车辆在单行道逆行时,通过仪表上进行声光报警,警示驾驶员,当检测到驾驶员逆行超车时,在仪表上进行警示,提醒驾驶员不要逆行超车,规范驾驶员的操作行为;
37、2、本发明能够在驾驶员逆行超车时,通过检测周边的目标信息,并规划出最优路径,对驾驶员进行提醒,让驾驶员进行最合适的操作,完成换道,从而降低逆行超车时发生事故的几率;
38、3、本发明能够在驾驶员在逆行超车,且检测到没有换道路径时,对驾驶员进行警示的同时,进行双闪警示或远光灯闪烁警示,提醒对向来车,避免和对向来车碰撞。
- 还没有人留言评论。精彩留言会获得点赞!