一种风电叶片运输车防倾翻预警方法、系统及存储介质与流程
本技术涉及风电叶片运输的,尤其是涉及一种风电叶片运输车防倾翻预警方法、系统及存储介质。
背景技术:
1、随着国家对清洁能源的大力发展,清洁能源的开发与利用越来越普遍,其中,风力发电在我国的发展势头迅猛,风力发电设备产量很大。
2、风力发电机的叶片尺寸一般在三四十米,更长者甚至可达100多米,并且根据我国风力资源分布状况,风电场大多地处高原山区,地势复杂,风电叶片运输设备在使用时,需要实现举升、回转、变桨等多种动作以躲避障碍物。因此,需要使用专用的叶片扬举车来负责在山路上运输风电叶片。
3、叶片扬举车的举升、回转、变桨等动作是在行驶状态中进行的,在此过程中车辆没有液压支腿固定,且车辆底盘也往往是非水平状态,一旦恰逢转弯的路段,山地运输弯度小,容易导致发生翻车现象。现有运输过程中全靠相应的操作人员通过观察道路情况再根据经验来进行操作。而操作人员经验不足时就容易对当前道路情况出现误判,从而出现误操作,导致车辆倾翻。
技术实现思路
1、本技术公开一种风电叶片运输车防倾翻预警方法、系统及存储介质,可以对车辆的运输状态进行监控,根据所采集的车辆运输状态的变化对未来短时间内的车辆运行状态进行预测,提前判断出继续当前的操作是否会造成车辆倾翻,以此辅助操作人员更加安全地完成对叶片转角的操作,降低对操作人员在操作经验上的要求。
2、第一方面,本技术提供一种风电叶片运输车防倾翻预警方法,采用如下的技术方案:
3、一种风电叶片运输车防倾翻预警方法,包括以下步骤:
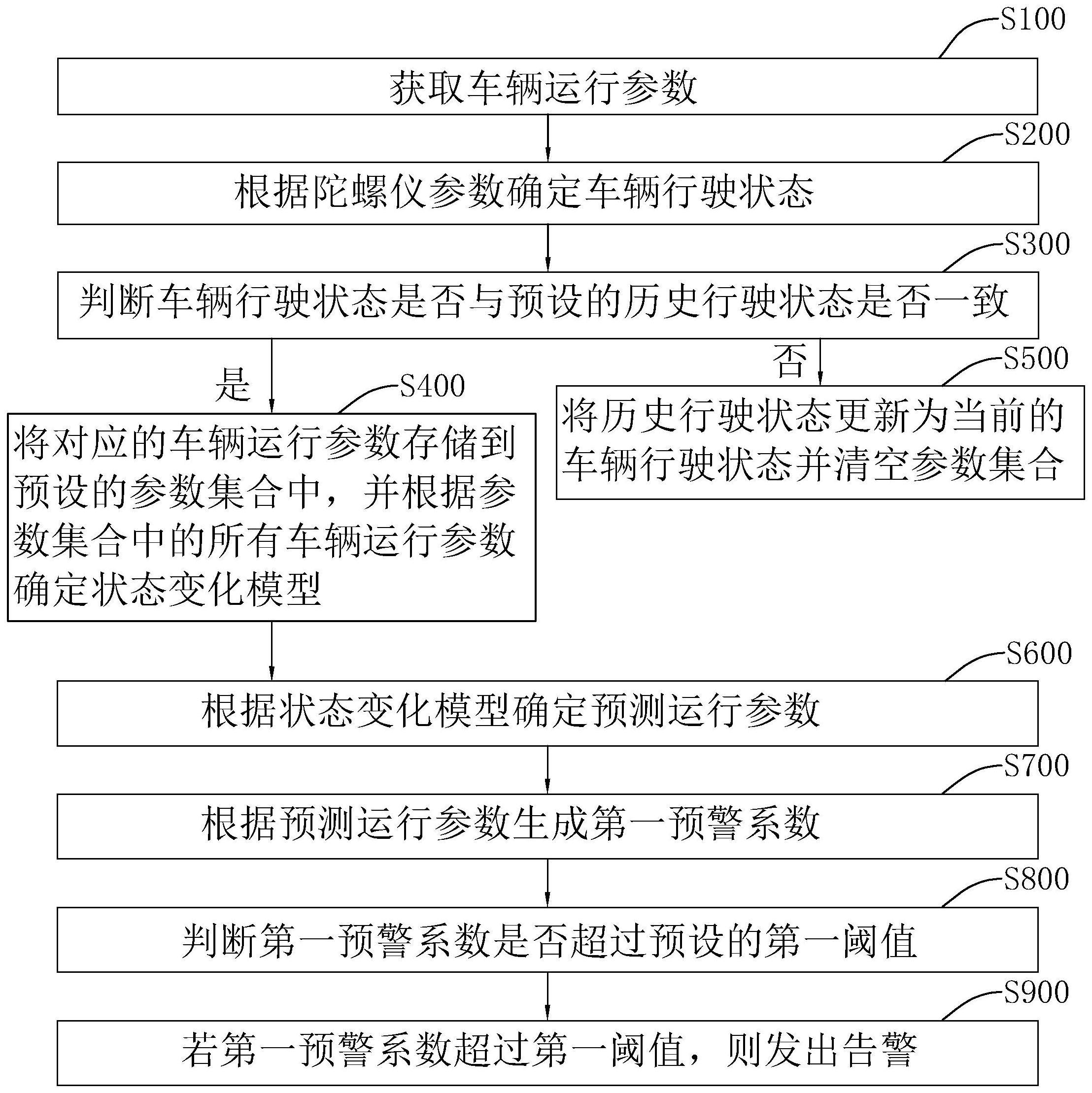
4、获取车辆运行参数,所述车辆运行参数包括陀螺仪参数、速度参数、叶片参数;
5、根据陀螺仪参数确定车辆行驶状态;
6、判断车辆行驶状态是否与预设的历史行驶状态是否一致,
7、若是,则将对应的车辆运行参数存储到预设的参数集合中,并根据参数集合中的所有车辆运行参数确定状态变化模型,所述参数集合存储有同一历史行驶状态的车辆运行参数;
8、若不是,则将历史行驶状态更新为当前的车辆行驶状态并清空参数集合;
9、根据状态变化模型确定预测运行参数,所述预测运行参数是在预设时间后预测出的车辆运行参数;
10、根据预测运行参数生成第一预警系数;
11、判断第一预警系数是否超过预设的第一阈值,
12、若第一预警系数超过第一阈值,则发出告警。
13、通过上述技术方案,收集车辆在同一行驶状态下的若干车辆运行参数,并以此确定当前车辆的状态变化模型,根据状态变化模型来预测车辆在接下来时间内的车辆运行参数,根据预测出的车辆运行参数来生成第一预警系数,当第一预警系数超过第一阈值时发出告警以提醒操作人员继续当前的操作可能会导致车辆倾翻,从而使操作人员能够提早发现并停止不正当的操作,相对可以降低对操作人员的操作经验的要求。
14、可选的,所述将历史行驶状态更新为当前的车辆行驶状态并清空参数集合之前,包括以下步骤:
15、根据当前的车辆运行参数生成第二预警系数,
16、判断第二预警系数是否超过预设的第二阈值,其中,所述第二阈值低于第一阈值,
17、若第二预警系数超过预设的第二阈值,则发出告警。
18、可选地,所述状态变化模型包括车辆变化模型和叶片变化模型;所述根据参数集合中的所有车辆运行参数确定状态变化模型,包括以下步骤:
19、根据参数集合中的所有叶片参数确定叶片变化模型;
20、根据参数集合中的所有陀螺仪参数和对应的速度参数确定车辆变化模型。
21、可选地,所述根据参数集合中的所有叶片参数确定叶片变化模型,包括以下步骤:
22、所述叶片参数包括叶片角度;
23、按照获取时间的先后对叶片角度进行排序以得到相应的队列;
24、根据队列中叶片角度的变化趋势从预设的基础模型中匹配出对应的基础模型;所述基础模型包括递增模型、递减模型和稳定模型;
25、对队列中的不符合匹配出的基础模型的叶片角度进行过滤,
26、根据队列中相邻叶片角度的差值以及获取相邻叶片角度所需的时间间隔的正比关系确定模型系数;
27、根据匹配出的基础模型和模型系数生成叶片变化模型。
28、可选地,所述根据队列中叶片角度的变化趋势从预设的基础模型中匹配出对应的基础模型,包括以下步骤:
29、依次计算队列中相邻叶片角度的差值,
30、基于数值的大小对差值进行分类以得到正数集合、负数集合以及正负数集合;
31、根据包含差值数量最多的集合确定基础模型,其中正数集合对应递增模型,负数集合对应递减模型,正负间集合对应稳定模型。
32、可选地,所述根据参数集合中的所有陀螺仪参数和对应的速度参数确定车辆变化模型,包括以下步骤:
33、根据参数集合中的所有陀螺仪参数和速度参数确定车辆移动路段;
34、分别计算出车辆移动路段和若干预设的车辆移动路线的重叠度,
35、筛选出若干重叠度靠前的车辆移动路线,并根据筛选出的车辆移动路线确定相应的车辆变化模型。
36、可选地,所述筛选出若干重叠度靠前的车辆移动路线,包括以下步骤:
37、判断当前车辆移动路段所对应的车辆运输参数的个数是否超过预设值,
38、若是,则仅将最高重叠度的车辆移动路线作为筛选出的车辆移动路线;
39、若不是,则根据重叠度从大到小的顺序选择前n个重叠度,并将对应的车辆移动路线作为筛选出的车辆移动路线,n为预设的正整数。
40、第二方面,本技术提供一种风电叶片运输车防倾翻预警系统,采用如下的技术方案:
41、一种风电叶片运输车防倾翻预警系统,包括:
42、数据获取模块,用于获取车辆运行参数,所述车辆运行参数包括陀螺仪参数、速度参数、叶片参数;
43、数据处理模块,根据陀螺仪参数确定车辆行驶状态,并判断车辆行驶状态是否与预设的历史行驶状态是否一致,若是,则将对应的车辆运行参数存储到预设的参数集合中,并根据参数集合中的所有车辆运行参数确定状态变化模型,所述参数集合存储有同一历史行驶状态的车辆运行参数;若不是,则将历史行驶状态更新为当前的车辆行驶状态并清空参数集合;
44、预测模块,用于根据状态变化模型确定预测运行参数,所述预测运行参数是在预设时间后预测出的车辆运行参数;并根据预测运行参数生成第一预警系数;
45、数据判断模块,用于判断第一预警系数是否超过预设的第一阈值,若第一预警系数超过第一阈值,则发出告警。
46、第三方面,本技术提供一种可读存储介质,存储有能被处理器加载并执行上述的一种风电叶片运输车防倾翻预警方法的计算机程序。
47、综上所述,本技术包括以下至少一种有益技术效果:收集车辆在同一行驶状态下的若干车辆运行参数,并以此确定当前车辆的状态变化模型,根据状态变化模型来预测车辆在接下来时间内的车辆运行参数,根据预测出的车辆运行参数来生成第一预警系数,当第一预警系数超过第一阈值时发出告警以提醒操作人员继续当前的操作可能会导致车辆倾翻,从而使操作人员能够提早发现并停止不正当的操作,相对可以降低对操作人员的操作经验的要求。
- 还没有人留言评论。精彩留言会获得点赞!