基于船舶行为模式的航线提取方法和系统
本发明涉及船舶,尤其涉及一种基于船舶行为模式的航线提取方法和系统。
背景技术:
1、水路运输作为我国综合交通运输体系的重要组成部分,在支撑国民经济发展、优化国土开发和产业布局、促进对外贸易和国际竞争力提升、维护国家权益和经济安全等方面发挥着重要作用。船舶作为水路运输的主体,是国家综合立体交通网的构成要素,其智能化技术已然成为了船舶工程和智能航海等学科领域研究的热点。
2、现有的通过ais数据获取船舶航线的过程中,主要有三类方法:基于格网的方法、基于矢量的方法以及基于统计的方法。然而,由于ais数据的数量庞大,难以判定数据的可靠性,从而导致航线提取效率低。
3、因此,现有技术中在获取船舶航线的过程中,存在由于数据数量处理量大导致航线提取效率低的问题。
技术实现思路
1、有鉴于此,有必要提供一种基于船舶行为模式的航线提取方法和系统,以解决在获取船舶燃油装载量的过程中,存在的测量误差较大的问题。
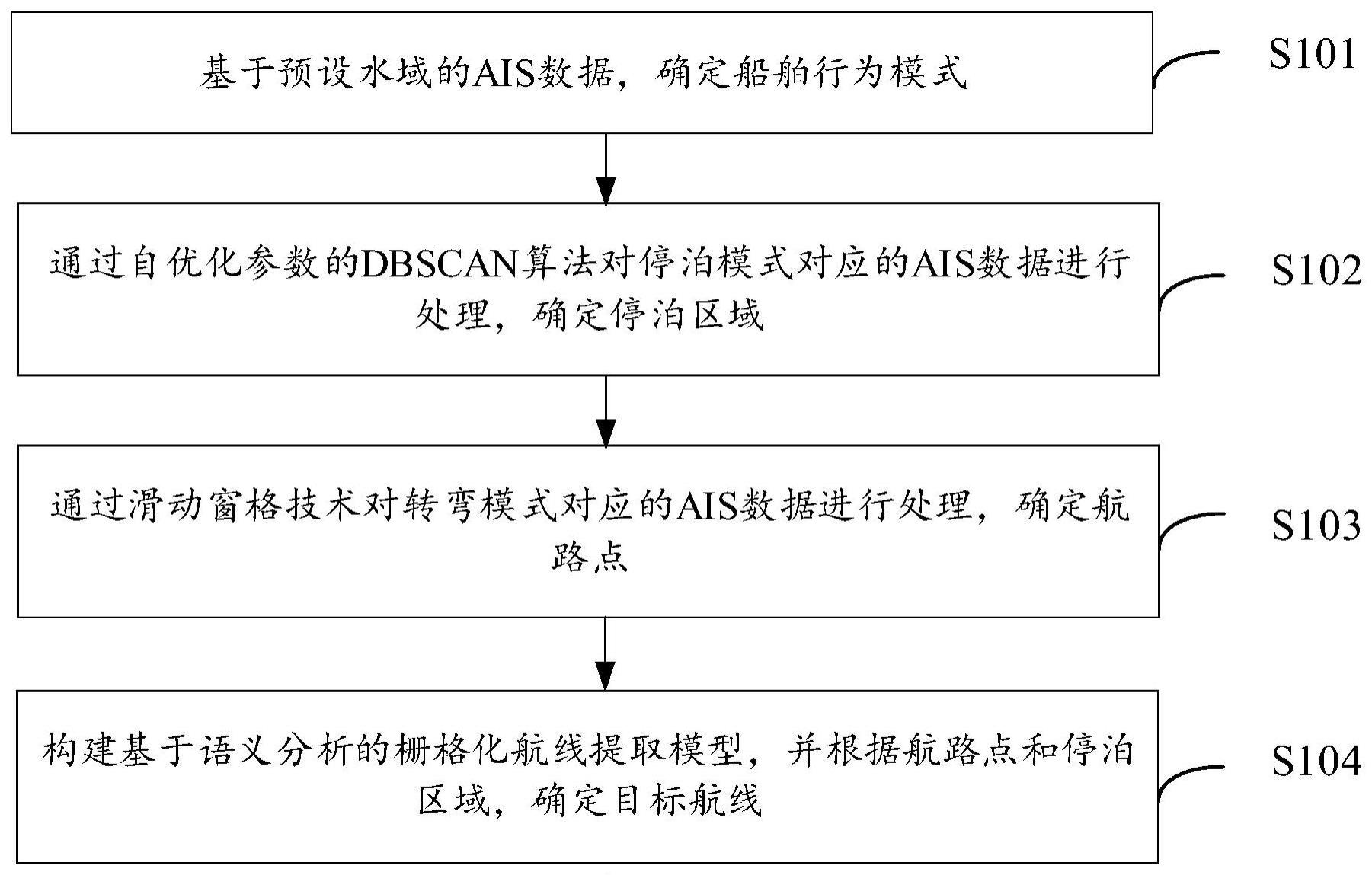
2、为了解决上述问题,本发明提供一种基于船舶行为模式的航线提取方法,包括:
3、基于预设水域的ais数据,确定船舶行为模式,其中,船舶行为模式至少包括停泊模式和转弯模式;
4、通过自优化参数的dbscan算法对停泊模式对应的ais数据进行处理,确定停泊区域;
5、通过滑动窗格技术对转弯模式对应的ais数据进行处理,确定航路点;
6、构建基于语义分析的栅格化航线提取模型,并根据航路点和停泊区域,确定目标航线。
7、进一步地,基于预设水域的ais数据,确定船舶行为模式,包括:
8、构建自适应的船舶行为模式辨识模型;
9、获取ais数据对应的航行速度、航行时间与航行距离;
10、基于自适应的船舶行为模式辨识模型,分别比较航行速度、航行时间和航行距离,与速度阈值、时间阈值和距离阈值的关系,确定ais数据对应的船舶行为模式。
11、进一步地,通过自优化参数的dbscan算法对停泊模式对应的ais数据进行处理,确定停泊区域,包括:
12、构建参数优化评价模型;
13、根据参数优化评价模型确定dbscan算法的最优参数,并确定基于最优参数的自优化参数的dbscan算法;
14、根据自优化参数的dbscan算法,对停泊模式对应的ais数据进行处理,确定停泊区域。
15、进一步地,通过滑动窗格技术对转弯模式对应的ais数据进行处理,确定航路点,包括:
16、根据转弯模式对应的ais数据,确定转弯段;
17、对转弯段进行二次识别,缩小窗口长度至预设轨迹点数,确定航路点。
18、进一步地,构建基于语义分析的栅格化航线提取模型,并根据航路点和停泊区域,确定目标航线,包括:
19、构建基于语义分析的栅格化航线提取模型;
20、对预设水域进行栅格化处理,确定预设水域的多个栅格区域;
21、根据基于语义分析的栅格化航线提取模型对航路点和停泊区域进行语义提取,确定栅格区域对应的船舶行程语义对象;
22、对船舶行程语义对象进行匹配,确定目标航线。
23、进一步地,对船舶行程语义对象进行匹配,确定目标航线,包括:
24、获取每一栅格区域中的船舶行程语义对象的对象数量;
25、根据船舶行程语义对象,确定两个目的地,其中,第一目的地作为航线起点,第二目的地作为航线终点;
26、获取两个目的地对应的第一目的栅格区域和第二目的栅格区域,并确定第一目的栅格区域和第二目的栅格区域之间任一行/列的栅格区域对应的船舶行程语义对象的对象数量;
27、连接任一行/列的对象数量最大值对应的栅格区域,确定目标航线。
28、进一步地,在根据基于语义分析的栅格化航线提取模型对航路点和停泊区域进行语义提取之前,还包括:
29、根据停泊区域,对初始航路点和初始停泊区域进行分类,确定每一轨迹簇对应的航路点和停泊区域;
30、其中,同一轨迹簇的停泊区域相同。
31、为了解决上述问题,本发明还提供一种基于船舶行为模式的航线提取系统,包括:
32、船舶行为模式确定模块,用于基于预设水域的ais数据,确定船舶行为模式,其中,船舶行为模式至少包括停泊模式和转弯模式;
33、停泊区域确定模块,用于通过自优化参数的dbscan算法对停泊模式对应的ais数据进行处理,确定停泊区域;
34、航路点确定模块,用于通过滑动窗格技术对转弯模式对应的ais数据进行处理,确定航路点;
35、目标航线确定模块,用于构建基于语义分析的栅格化航线提取模型,并根据航路点和停泊区域,确定目标航线。
36、为了解决上述问题,本发明还提供一种电子设备,包括处理器以及存储器,存储器上存储有计算机程序,计算机程序被处理器执行时,实现如上述任意一技术方案所述的基于船舶行为模式的航线提取方法。
37、为了解决上述问题,本发明还提供一种存储介质,存储介质存储有计算机程序指令,当计算机程序指令被计算机执行时,使计算机执行如上述任意一技术方案所述的基于船舶行为模式的航线提取方法。
38、采用上述实施例的有益效果是:本发明提供一种基于船舶行为模式的航线提取方法和系统,该方法通过以船舶行为模式为分类标准,对ais数据进行数据分类和筛选,分别得到停泊模式和转弯模式对应的ais数据;然后分别通过自优化参数的dbscan算法对停泊模式对应的ais数据进行处理,确定停泊区域,通过滑动窗格技术对转弯模式对应的ais数据进行处理,确定航路点,从而得到与确定航线相关的停泊区域和航路点,实现了对ais数据的筛选,减少了后续的数据处理量;进一步地,通过构建基于语义分析的栅格化航线提取模型对航路点和停泊区域进行数据处理,从而确定目标航线,能够提高数据处理的效率,并且保证目标航线的可靠性。
技术特征:
1.一种基于船舶行为模式的航线提取方法,其特征在于,包括:
2.根据权利要求1所述的基于船舶行为模式的航线提取方法,其特征在于,所述基于预设水域的ais数据,确定船舶行为模式,包括:
3.根据权利要求1所述的基于船舶行为模式的航线提取方法,其特征在于,所述通过自优化参数的dbscan算法对所述停泊模式对应的所述ais数据进行处理,确定停泊区域,包括:
4.根据权利要求1所述的基于船舶行为模式的航线提取方法,其特征在于,所述通过滑动窗格技术对所述转弯模式对应的所述ais数据进行处理,确定航路点,包括:
5.根据权利要求1所述的基于船舶行为模式的航线提取方法,其特征在于,所述构建基于语义分析的栅格化航线提取模型,并根据所述航路点和所述停泊区域,确定目标航线,包括:
6.根据权利要求5所述的基于船舶行为模式的航线提取方法,其特征在于,所述对所述船舶行程语义对象进行匹配,确定目标航线,包括:
7.根据权利要求5所述的基于船舶行为模式的航线提取方法,其特征在于,在所述根据所述基于语义分析的栅格化航线提取模型对所述航路点和所述停泊区域进行语义提取之前,还包括:
8.一种基于船舶行为模式的航线提取系统,其特征在于,包括:
9.一种电子设备,其特征在于,包括处理器以及存储器,所述存储器上存储有计算机程序,所述计算机程序被所述处理器执行时,实现如权利要求1-7任一项所述的基于船舶行为模式的航线提取方法。
10.一种存储介质,其特征在于,所述存储介质存储有计算机程序指令,当所述计算机程序指令被计算机执行时,使计算机执行根据权利要求1至7中任一所述的基于船舶行为模式的航线提取方法。
技术总结
本申请公开了一种基于船舶行为模式的航线提取方法和系统,该方法通过以船舶行为模式为分类标准,对AIS数据进行数据分类和筛选,分别得到停泊模式和转弯模式对应的AIS数据;然后分别通过自优化参数的DBSCAN算法对停泊模式对应的AIS数据进行处理,确定停泊区域,通过滑动窗格技术对转弯模式对应的AIS数据进行处理,确定航路点,从而得到与确定航线相关的停泊区域和航路点,实现了对AIS数据的筛选,减少了后续的数据处理量;进一步地,通过构建基于语义分析的栅格化航线提取模型对航路点和停泊区域进行数据处理,从而确定目标航线,能够提高数据处理的效率,并且保证目标航线的可靠性。
技术研发人员:刘钊,闵正麟,高海若,刘文,马全党
受保护的技术使用者:武汉理工大学
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!