一种基于经验模态分解与深度学习结合的交通流预测方法
本发明属于交通流参数预测方法,具体涉及一种基于经验模态分解与深度学习结合的交通流预测方法。
背景技术:
1、在智能交通系统的研究中,实时预测未来的交通流参数对实际应用有重要意义,例如预防交通拥堵,交通灯调度,路径规划等。由于近年道路上的车辆急剧增加,在某些重要路段或者高峰期会出现道路拥堵甚至瘫痪的现象,交通流参数预测作为智能交通的一部分,引起了学术界和工业界的关注。
2、交通流参数预测旨在通过摄像头获取实时交通流参数,来对未来时间段的未来交通流参数进行预测,一般来说,该技术分为两个子任务:(1)采集交通流数据,通常采用传感器或者摄像头来获取车辆数量、平均车速、平均占有率等交通流数据(2)利用历史交通流数据构建预测模型,对某路段未来时间段的交通流数据进行预测。尽管交通流数据的采集和预测的技术已经成熟,该领域的专家已经开发了许多强大的多步骤预测模型,但仍然面临着许多挑战:(1)传统的交通流参数预测方法往往基于传统的统计学模型,但是这些方法在处理非线性、非稳态等复杂情况时,预测精度有限,(2)日周期和周周期之间的时间峰值缓慢变化,导致交通流信号的非平稳性,导致准确预测困难。
技术实现思路
1、本发明提供了一种基于经验模态分解与深度学习结合的交通流预测方法,以解决传统的方法在交通高峰期时段交通流变化缓慢的情况下,效果不理想的技术问题。
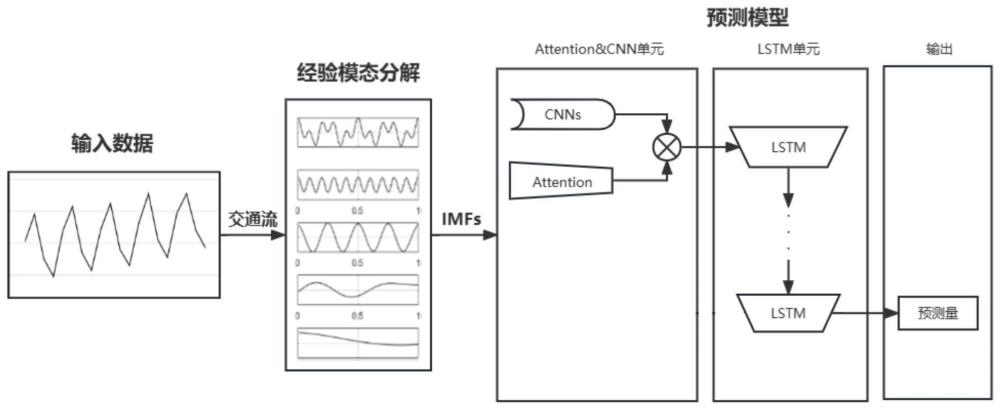
2、本发明中的方法包括以下步骤:
3、步骤1:对采集到的交通流数据时间序列进行经验模态分解(empirical modedecomposition,emd),得到多个本征模函数(intrinsic mode function,imf)分量序列;
4、步骤2:取各分解得到的分量序列中最近的指定数量个数据,形成各分量序列的跨尺度子序列,依次将跨尺度子序列逐行拼接为输入矩阵;
5、步骤3:将输入矩阵输入一带有注意力机制的卷积神经网络(convolutionalneural networks,cnn)模型提取时间序列特征,得到cnn模块的输出特征矩阵以及相应注意力机制所输出的显著性特征矩阵;
6、步骤4:将所述输出特征矩阵与显著性特征矩阵逐元素相乘得到融合特征矩阵,再逐行还原为各分量的融合特征序列,以各融合特征序列作为长短期记忆网络(long short-term memory,lstm)的输入,进行各分量的时间序列预测;
7、步骤5,将各分量的时间序列预测结果重构为最后的预测结果。
8、进一步的,所述交通流数据时间序列的采样间隔为30分钟;
9、进一步的,所述交通流数据时间序列为当前时刻前40天内的历史交通流数据时间序列;
10、进一步的,所述交通流数据包括交通速度数据、交通车流量数据或交通密度数据中的一种或多种。
11、进一步的,所述长短期记忆网络的隐藏层维数是64。
12、进一步的,所述指定数量为7。
13、进一步的,所述长短期记忆网络的训练中,采用adam优化器进行参数优化。
14、本发明的有益效果在于:所提出的经验模态分解可以应用于任何类型的时间序列(信号)的分解,因而在处理非平稳及非线性数据上,比之前的传统方法更具有明显的优势。提出了基于注意力机制的卷积神经网络和长短时记忆网络联合模型来预测交通流,可以更好地处理非线性、非稳态等复杂情况,提高预测精度,利用卷积神经网络和长短时记忆网络提取交通流的时空特征,可以更好地反映交通流的规律和变化趋势。本方明的方法在现有的公开数据集上取得了比较好的结果,在nyc-taxi数据集上的平均绝对百分比误差为5.84%,这已经领先当前最先进的模型结果。
技术特征:
1.一种基于经验模态分解与深度学习结合的交通流预测方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的方法,其特征在于,所述交通流数据时间序列的采样间隔为30分钟。
3.根据权利要求1所述的方法,其特征在于,所述交通流数据时间序列为当前时刻前40天内的历史交通流数据时间序列。
4.根据权利要求1所述的方法,其特征在于,所述交通流数据包括交通速度数据、交通车流量数据或交通密度数据中的一种或多种。
5.根据权利要求1所述的方法,其特征在于,所述长短期记忆网络的隐藏层维数是64。
6.根据权利要求1所述的方法,其特征在于,所述指定数量为7。
7.根据权利要求1所述的方法,其特征在于,,所述长短期记忆网络的训练中,采用adam优化器进行参数优化。
技术总结
本发明属于交通流参数预测方法,具体涉及一种基于经验模态分解与深度学习结合的交通流预测方法。包括对采集到的交通流数据时间序列的进行经验模态分解得到多个本征模函数分量序列;形成各分量序列的跨尺度子序列,依次将跨尺度子序列逐行拼接为输入矩阵;将输入矩阵输入一带有注意力机制的卷积神经网络模型提取时间序列特征,将所述输出特征矩阵与显著性特征矩阵逐元素相乘得到融合特征矩阵,再逐行还原为各分量的融合特征序列,以各融合特征序列作为长短期记忆网络的输入,进行各分量的时间序列预测;将各分量的时间序列预测结果重构为最后的预测结果。解决了传统的方法在交通高峰期时段交通流变化缓慢的情况下,效果不理想的技术问题。
技术研发人员:黎勇,王森正,刘美琦,吴建光,吴金泽,刘锐
受保护的技术使用者:重庆大学
技术研发日:
技术公布日:2024/1/22
- 还没有人留言评论。精彩留言会获得点赞!