匝道路口限速方法、装置、车辆及存储介质与流程
本发明涉及车辆安全驾驶领域,具体涉及一种匝道路口限速方法、装置、车辆及存储介质。
背景技术:
1、驾驶辅助系统主要是依靠毫米波雷达和摄像头识别车道线以及车辆信息,实现单车道内的加减速以及横向控制,同时融合adas(advanced driver assistance systems,先进驾驶辅助系统)地图,可以实现根据道路标识和地图信息的自动限速,其中,adas地图依靠基站提供定位信息,图商提供地图信息,再经过车机转换成can(controller areanetwork,控制器局域网)信号,但是在道路交通复杂(如立交、匝道、山区等)区域容易出现信号跳变,通过摄像头识别道路标识时,由于感知局限性存在识别晚、汉字标识无法识别等问题,极易容易出现误限速,特别是在匝道口容易异常限速。
2、相关技术中,专利[cn115273511a]提出一种匝道限速标示显示方法,在识别到匝道的限速标识时,通过导航地图获取目标车辆的规划路径和当前位置;根据当前位置和规划路径,判断匝道是否在规划路径上,得到判断结果;在判断结果为匝道在规划路径上时,获取当前位置至匝道的距离;在距离小于预设阈值时,将限速标识在目标车辆中显示。
3、然而,该方法仅可以根据传感器采集的限速标识并结合导航的规划路径向用户显示限速提醒,依然无法避免导航输出的错误匝道信息和匝道限速牌识别异常而引起的异常限速,亟待解决。
技术实现思路
1、本发明的目的之一在于提供一种匝道路口限速方法,以解决因导航输出的错误匝道信息和匝道限速牌识别异常而引起的驾驶辅助模式异常限速的问题;目的之二在于提供一种匝道路口限速装置;目的之三在于提供一种车辆;目的之四在于提供一种计算机可读存储介质。
2、为了实现上述目的,本发明采用的技术方案如下:
3、一种匝道路口限速方法,包括以下步骤:
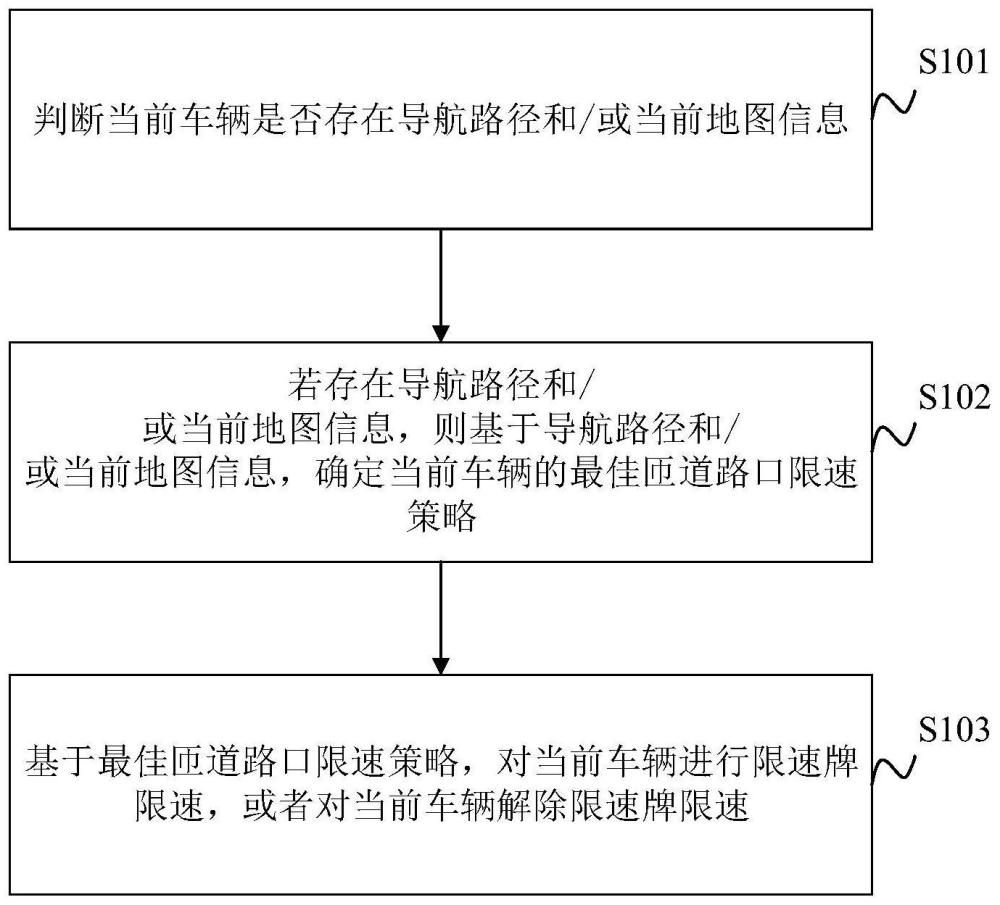
4、判断当前车辆是否存在导航路径和/或当前地图信息;
5、若存在所述导航路径和/或所述当前地图信息,则基于所述导航路径和/或当前地图信息,确定所述当前车辆的最佳匝道路口限速策略;以及
6、基于所述最佳匝道路口限速策略,对所述当前车辆进行限速牌限速,或者对所述当前车辆解除限速牌限速。
7、根据上述技术手段,本发明可以基于导航路径和地图信息指定最佳匝道路口限速策略,以解决因导航输出的错误匝道信息和匝道限速牌识别异常而引起的驾驶辅助模式异常限速的问题,减少用户抱怨,增强用户驾驶体验感。
8、进一步地,基于所述导航路径和/或当前地图信息,确定所述当前车辆的最佳匝道路口限速策略,包括:
9、若所述当前车辆存在所述导航路径和所述当前地图信息,或者所述当前车辆仅存在所述导航路径,则根据所述当前导航路径判断所述当前车辆是否经过第一匝道;
10、若所述当前车辆经过所述第一匝道,则所述最佳匝道路口限速策略为在所述当前车辆处于预设限速范围时对所述当前车辆进行限速牌限速,并在所述当前车辆进入所述第一匝道后对所述当前车辆解除限速牌限速;否则,所述最佳匝道路口限速策略为对所述当前车辆解除限速牌限速。
11、根据上述技术手段,在当前车辆经过匝道时,若当前车辆处于预设限速范围,则进行限速牌限速,在车辆进入匝道后解除限速牌限速,若当前车辆不经过匝道,则对当前车辆解除限速牌限速,由此减少异常限速的情况发生,提升用户体验。
12、进一步地,所述预设限速范围为所述当前车辆距离匝道入口小于第一预设距离,或者所述当前车辆距离匝道出口小于第二预设距离,其中,所述第二预设距离小于所述第一预设距离。
13、根据上述技术手段,设置最佳减速区间,既可以满足安全行驶要求,又可以增强用户驾驶体验感。
14、进一步地,所述基于所述导航路径和/或当前地图信息,确定所述当前车辆的最佳匝道路口限速策略,还包括:
15、若所述当前车辆仅存在所述当前地图信息,则判断所述当前地图信息显示范围内是否存在第二匝道;
16、若所述当前地图信息显示范围内存在所述第二匝道,则所述最佳匝道路口限速策略为对所述当前车辆解除限速牌限速,否则,根据预设限速策略对所述当前车辆进行限速。
17、根据上述技术手段,在仅存在地图信息时,若当前地图信息显示范围内存在匝道,则对当前车辆解除限速牌限速,否则按照预设限速策略进行限速,由此,减少异常限速的情况发生,提升用户体验。
18、进一步地,在判断所述当前车辆是否存在所述导航路径和/或所述当前地图信息之后,还包括:
19、若所述当前车辆不存在所述导航路径和所述当前地图信息,则检测限速牌和所述当前车辆的第一横向距离、所述道路边沿与所述当前车辆的第二横向距离,以及最右侧路沿与次右侧车道线距离;
20、若所述第一横向距离大于所述第二横向距离,且所述最右侧路沿与所述次右侧车道线的距离按照预设增大策略增大,则对所述当前车辆解除限速牌限速。
21、根据上述技术手段,在既不存在导航路径又不存在地图信息时,可以在限速牌和当前车辆的第一横向距离大于道路边沿与当前车辆的第二横向距离,且最右侧路沿与次右侧车道线距离逐渐增大时,对当前车辆解除限速牌限速,从而减少异常限速的情况发生,增强用户体验感。
22、进一步地,在判断所述当前车辆是否存在所述导航路径和/或所述当前地图信息之前,还包括:
23、判断所述当前车辆是否处于驾驶辅助模式;
24、若所述车辆未处于所述驾驶辅助模式,则控制所述当前车辆发出驾驶辅助模式开启提醒。
25、根据上述技术手段,为当前车辆指定最佳匝道限速策略之前,还需要判断车辆是否处于驾驶辅助模式,若未处于及时控制车辆向用户发出驾驶辅助模式开启提醒。
26、一种匝道路口限速装置,包括:
27、判断模块,用于判断当前车辆是否存在导航路径和/或当前地图信息;
28、确定模块,用于存在所述导航路径和/或所述当前地图信息时,基于所述导航路径和/或当前地图信息,确定所述当前车辆的最佳匝道路口限速策略;以及
29、限速模块,用于基于所述最佳匝道路口限速策略,对所述当前车辆进行限速牌限速,或者对所述当前车辆解除限速牌限速。
30、进一步地,所述确定模块,具体用于:
31、在所述当前车辆存在所述导航路径和所述当前地图信息,或者所述当前车辆仅存在所述导航路径时,根据所述当前导航路径判断所述当前车辆是否经过第一匝道;
32、在所述当前车辆经过所述第一匝道时,所述最佳匝道路口限速策略为在所述当前车辆处于预设限速范围时对所述当前车辆进行限速牌限速,并在所述当前车辆进入所述第一匝道后对所述当前车辆解除限速牌限速;否则,所述最佳匝道路口限速策略为对所述当前车辆解除限速牌限速。
33、进一步地,所述预设限速范围为所述当前车辆距离匝道入口小于第一预设距离,或者所述当前车辆距离匝道出口小于第二预设距离,其中,所述第二预设距离小于所述第一预设距离。
34、进一步地,所述确定模块,还用于:
35、在所述当前车辆仅存在所述当前地图信息时,判断所述当前地图信息显示范围内是否存在第二匝道;
36、在所述当前地图信息显示范围内存在所述第二匝道时,所述最佳匝道路口限速策略为对所述当前车辆解除限速牌限速,否则,根据预设限速策略对所述当前车辆进行限速。
37、进一步地,在判断所述当前车辆是否存在所述导航路径和/或所述当前地图信息之后,所述判断模块,还用于:
38、在所述当前车辆不存在所述导航路径和所述当前地图信息时,检测限速牌和所述当前车辆的第一横向距离、所述道路边沿与所述当前车辆的第二横向距离,以及最右侧路沿与次右侧车道线距离;
39、在所述第一横向距离大于所述第二横向距离,且所述最右侧路沿与所述次右侧车道线的距离按照预设增大策略增大时,对所述当前车辆解除限速牌限速。
40、进一步地,在判断所述当前车辆是否存在所述导航路径和/或所述当前地图信息之前,所述判断模块,还用于:
41、判断所述当前车辆是否处于驾驶辅助模式;
42、在所述车辆未处于所述驾驶辅助模式时,控制所述当前车辆发出驾驶辅助模式开启提醒。
43、一种车辆,包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述程序,以实现如上述实施例所述的匝道路口限速方法。
44、一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行,以用于实现如上述实施例所述的匝道路口限速方法。
45、本发明的有益效果:
46、通过地图和传感器融合,解决了因导航输出的错误匝道信息和匝道限速牌识别异常而引起的驾驶辅助模式异常限速的问题,实现有导航路径时的匝道减速,避免无导航路径时的异常限速,从而减少用户抱怨,增强用户驾驶体验感。
- 还没有人留言评论。精彩留言会获得点赞!