地磁车检器校准方法与流程
本发明涉及地磁车检器领域,具体是一种地磁车检器校准方法。
背景技术:
1、随着城市化进程的开展和汽车的普及,城市公共车位数字化改造越来越普遍。而地磁车检器作为核心数据采集点对车位管理起着关键作用。目前市面上存在双模或多模地磁车检器和单模地磁车检器等产品形态,单模地磁车检器具有成本低的优点,缺点是准确率不如多模地磁。因此如何提高地磁车检器准确率是一个技术重点和痛点。
技术实现思路
1、为了提高地磁车检器的准确率,本申请提供了一种地磁车检器校准方法。
2、本发明解决上述问题所采用的技术方案是:
3、地磁车检器校准方法,包括:
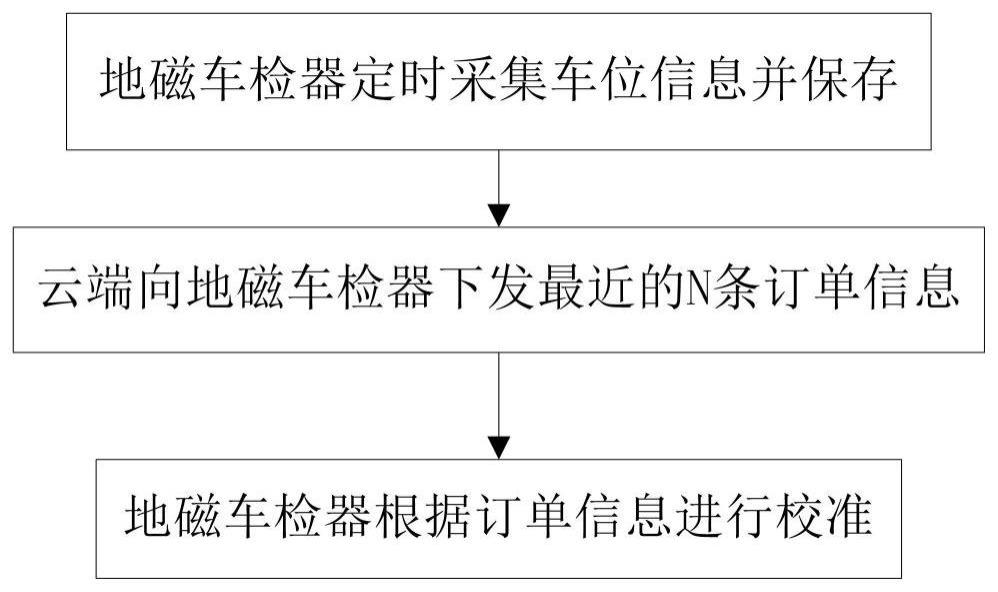
4、步骤1、地磁车检器定时采集车位信息并保存,所述车位信息至少包括:采集时间、车位状态及采集时间对应的三轴地磁强度;
5、步骤2、云端向地磁车检器下发最近的n条订单信息,所述订单信息由第三方创建,至少包括;入库时间,出库时间,有车取证时间或无车取证时间;
6、步骤3、地磁车检器根据订单信息进行校准:
7、若订单信息中存在无车取证时间tout,则遍历地磁车检器保存记录中介于本订单入库和出库时间段间的所有历史记录,如果存在两条相邻历史记录m和n,满足第一条件:m.s=n.s=有车,且tm<tout<tn,则将n时刻的地磁采样值设定为空车基线;
8、若订单信息中存在有车取证时间tin,则遍历地磁车检器保存记录中介于本订单入库和出库时间段间的所有历史记录,如果存在两条相邻历史记录m和n,满足第二条件:m.s=n.s=无车,且tm<tin<tn,则将n时刻的地磁采样值设定为有车基线,tm、tn为采集时间,m.s、n.s为车位状态。
9、进一步地,当车位的地磁状态处于稳定时才保存车位信息。
10、进一步地,地磁状态处于稳定的判断方法为:前后两次采样的欧几里得距离小于第一阈值。
11、进一步地,所述第一阈值取10。
12、进一步地,所述步骤3中,第一条件与第二条件还包括:m和n的地磁数据欧几里得距离值小于第二阈值。
13、进一步地,所述第二阈值取20。
14、进一步地,所述步骤2中,第三方为人工pda或视频巡检车。
15、进一步地,所述步骤1还包括:地磁车检器向云端上报车位信息;所述步骤2具体为:当地磁车检器向云端上报车位信息的同时,云端向地磁车检器下发最近的n条订单信息。
16、进一步地,所述地磁车检器为单模地磁车检器、双模地磁车检器或多模地磁车检器。
17、本发明相比于现有技术具有的有益效果是:本发明通过云端适时下发经过人工或视频巡检车确认的订单内容触发地磁车检器自动校准的手段来实现地磁车检器的基线维护,具有提高地磁车检器准确率的效果。
技术特征:
1.地磁车检器校准方法,其特征在于,包括:
2.根据权利要求1所述的地磁车检器校准方法,其特征在于,所述步骤1中,当车位的地磁状态处于稳定时才保存车位信息。
3.根据权利要求2所述的地磁车检器校准方法,其特征在于,地磁状态处于稳定的判断方法为:前后两次采样的欧几里得距离小于第一阈值。
4.根据权利要求3所述的地磁车检器校准方法,其特征在于,所述第一阈值取10。
5.根据权利要求3所述的地磁车检器校准方法,其特征在于,所述步骤3中,第一条件与第二条件还包括:m和n的地磁数据欧几里得距离值小于第二阈值。
6.根据权利要求5所述的地磁车检器校准方法,其特征在于,所述第二阈值取20。
7.根据权利要求1所述的地磁车检器校准方法,其特征在于,所述步骤2中,第三方为人工pda或视频巡检车。
8.根据权利要求1所述的地磁车检器校准方法,其特征在于,所述步骤1还包括:地磁车检器向云端上报车位信息;所述步骤2具体为:当地磁车检器向云端上报车位信息的同时,云端向地磁车检器下发最近的n条订单信息。
9.根据权利要求1-8任意一项所述的地磁车检器校准方法,其特征在于,所述地磁车检器为单模地磁车检器、双模地磁车检器或多模地磁车检器。
技术总结
本申请涉及地磁车检器领域,为了提高地磁车检器的准确率,提供了地磁车检器校准方法,通过云端适时下发经过人工或视频巡检车确认的订单内容触发地磁车检器自动校准的手段来实现地磁车检器的基线维护,从而提高地磁车检器的准确率。
技术研发人员:寇望东,向洪元,代继林,姜联文,张骑,黄聪,谭彬
受保护的技术使用者:四川长虹新网科技有限责任公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!