一种基于多源异构数据的云控全息智驾方法及装置与流程
本技术涉及智能网联,尤其涉及一种基于多源异构数据的云控全息智驾方法及装置。
背景技术:
1、智能网联车辆是搭载先进的车载传感器、控制器、执行器等装置,并融合现代通信与网络技术的车辆,智能网联交通在现阶段相关研究中多集中于单一车辆或技术,在车端、云端以及中间协同管控方面存在着诸多不协调或功能单一,资源无法共享等问题,相关技术中尚未出现可支撑车路云一体化智能网联驾驶的解决方案,因此有必要提供一种信息融合程度高的适用于智能网联车辆的信息融合解决方案。
技术实现思路
1、本说明书实施例提供一种基于多源异构数据的云控全息智驾方法及装置,以提供一种信息融合程度高的适用于智能网联车辆的信息融合解决方案。
2、为解决上述技术问题,本说明书实施例是这样实现的:
3、根据本发明的第一方面,提供一种基于多源异构数据的云控全息智驾方法,应用于云控平台,包括:
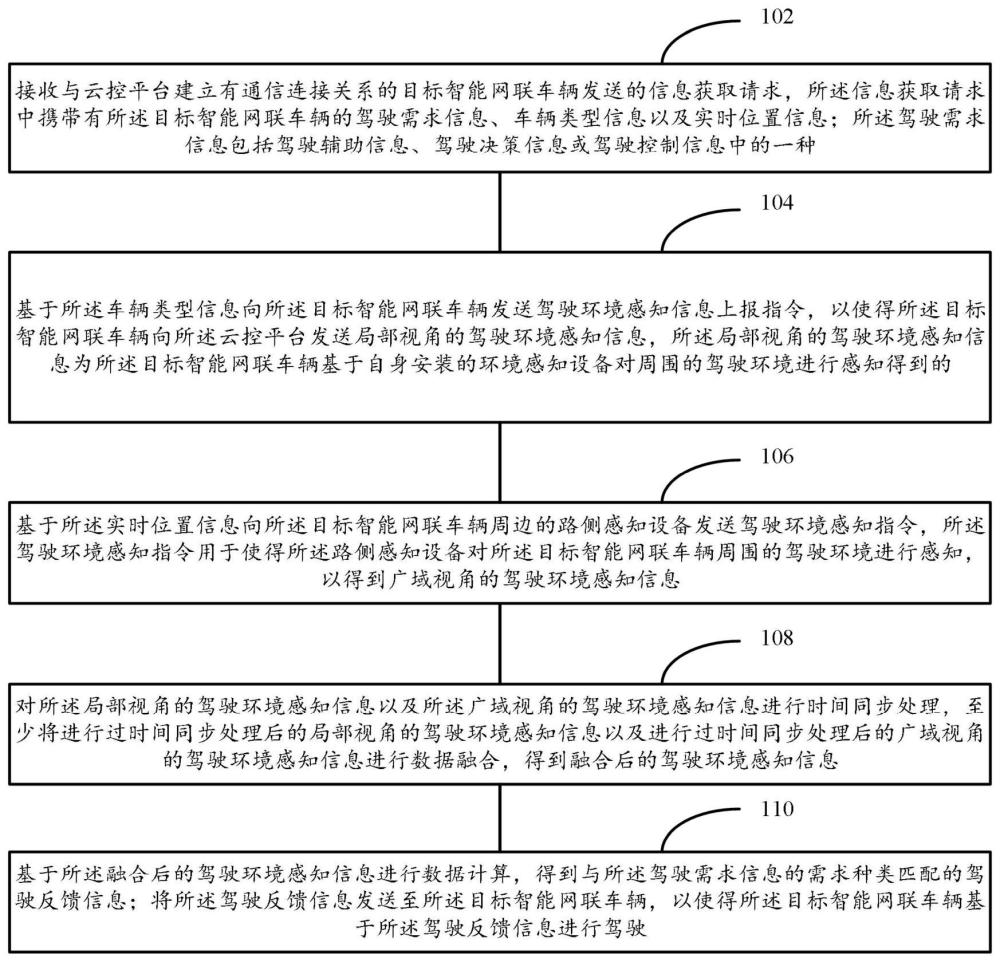
4、接收与云控平台建立有通信连接关系的目标智能网联车辆发送的信息获取请求,所述信息获取请求中携带有所述目标智能网联车辆的驾驶需求信息、车辆类型信息以及实时位置信息;所述驾驶需求信息包括驾驶辅助信息、驾驶决策信息或驾驶控制信息中的一种;
5、基于所述车辆类型信息向所述目标智能网联车辆发送驾驶环境感知信息上报指令,以使得所述目标智能网联车辆向所述云控平台发送局部视角的驾驶环境感知信息,所述局部视角的驾驶环境感知信息为所述目标智能网联车辆基于自身安装的环境感知设备对周围的驾驶环境进行感知得到的;
6、基于所述实时位置信息向所述目标智能网联车辆周边的路侧感知设备发送驾驶环境感知指令,所述驾驶环境感知指令用于使得所述路侧感知设备对所述目标智能网联车辆周围的驾驶环境进行感知,以得到广域视角的驾驶环境感知信息;
7、对所述局部视角的驾驶环境感知信息以及所述广域视角的驾驶环境感知信息进行时间同步处理,至少将进行过时间同步处理后的局部视角的驾驶环境感知信息以及进行过时间同步处理后的广域视角的驾驶环境感知信息进行数据融合,得到融合后的驾驶环境感知信息;
8、基于所述融合后的驾驶环境感知信息进行数据计算,得到与所述驾驶需求信息的需求种类匹配的驾驶反馈信息;将所述驾驶反馈信息发送至所述目标智能网联车辆,以使得所述目标智能网联车辆基于所述驾驶反馈信息进行驾驶。
9、优选的,所述对所述局部视角的驾驶环境感知信息以及所述广域视角的驾驶环境感知信息进行时间同步之前,包括:
10、分别对所述局部视角的驾驶环境感知信息和所述广域视角的驾驶环境感知信息进行数据清理,具体包括:对缺失的时序数据进行数据填充,对重复数据及离群值进行剔除。
11、优选的,若所述驾驶需求信息为用于提前获取停车位置信息,则所述对所述局部视角的驾驶环境感知信息以及所述广域视角的驾驶环境感知信息进行时间同步处理,至少将进行过时间同步处理后的局部视角的驾驶环境感知信息以及进行过时间同步处理后的广域视角的驾驶环境感知信息进行数据融合之前,还包括:
12、基于预先制作的高精地图确定所述目标智能网联车辆预定范围内的若干个安全停车位置,向所述若干个安全停车位置中的每个安全停车位置附近的路侧摄像头发送车位状态信息上传指令,所述车位状态信息上传指令用于使得所述路侧摄像头向所述云控平台上报相应监控范围内的安全停车位置是否处于被占用状态的信息;
13、在得到所述若干个安全停车位置中所有处于非占用状态的安全停车位置的位置信息后,将所述位置信息发送给所述目标智能网联车辆,以便供所述目标智能网联车辆进行选择。
14、优选的,若所述驾驶需求信息为获取所述目标智能网联车辆前方预定距离范围内的道路运行状况信息,则所述道路运行状况信息包括所述目标智能网联车辆规划的以及当前时刻正在行驶的行车路径上是否有抛洒物、是否有危险路况、是否有拥堵路况、是否有障碍物、是否有施工路段。
15、优选的,若所述驾驶需求信息为获取所述目标智能网联车辆前方预定距离范围内的道路运行状况信息,则所述将所述驾驶反馈信息发送至所述目标智能网联车辆之后,包括:
16、将所述道路运行状况信息发送给与所述目标智能网联车辆处于同一路段的其他智能网联车辆,以便实现道路运行状况信息的共享。
17、优选的,所述云控平台与车辆公共系统建立有通信连接,所述车辆公共系统包括停车管理系统、高速公路收费系统和城市交通管理及控制系统建立有通信连接,当所述驾驶需求信息为获取所述车辆公共系统的状态信息时,所述云控平台与具体的车辆公共系统的通信单元进行通信,以获取所述具体的车辆公共系统的状态信息,然后将所述状态信息发送给所述目标智能网联车辆。
18、根据本发明的第二方面,提供一种基于多源异构数据的云控全息智驾装置,应用于云控平台,包括:
19、信息获取请求接收模块,用于接收与云控平台建立有通信连接关系的目标智能网联车辆发送的信息获取请求,所述信息获取请求中携带有所述目标智能网联车辆的驾驶需求信息、车辆类型信息以及实时位置信息;所述驾驶需求信息包括驾驶辅助信息、驾驶决策信息或驾驶控制信息中的一种;
20、环境感知信息上报指令发送模块,用于基于所述车辆类型信息向所述目标智能网联车辆发送驾驶环境感知信息上报指令,以使得所述目标智能网联车辆向所述云控平台发送局部视角的驾驶环境感知信息,所述局部视角的驾驶环境感知信息为所述目标智能网联车辆基于自身安装的环境感知设备对周围的驾驶环境进行感知得到的;
21、驾驶环境感知指令发送模块,用于基于所述实时位置信息向所述目标智能网联车辆周边的路侧感知设备发送驾驶环境感知指令,所述驾驶环境感知指令用于使得所述路侧感知设备对所述目标智能网联车辆周围的驾驶环境进行感知,以得到广域视角的驾驶环境感知信息;
22、驾驶反馈信息生成模块,用于对所述局部视角的驾驶环境感知信息以及所述广域视角的驾驶环境感知信息进行时间同步处理,至少将进行过时间同步处理后的局部视角的驾驶环境感知信息以及进行过时间同步处理后的广域视角的驾驶环境感知信息进行数据融合,得到融合后的驾驶环境感知信息;基于所述融合后的驾驶环境感知信息进行数据计算,得到与所述驾驶需求信息的需求种类匹配的驾驶反馈信息;
23、驾驶反馈信息发送模块,用于将所述驾驶反馈信息发送至所述目标智能网联车辆,以使得所述目标智能网联车辆基于所述驾驶反馈信息进行驾驶。
24、根据本发明的第三方面,提供一种云控全息智驾系统,包括:
25、中心云计算平台,所述中心云计算平台与多个区域云计算平台建立有通信连接,所述多个区域云计算平台中的任意一个区域云计算平台与多个边缘云计算平台建立有通信连接;所述中心云计算平台与预定区域范围内的停车管理系统、高速公路收费系统和城市交通管理及控制系统建立有通信连接;其中,所述边缘云计算平台能够获取交通环境信息的地理范围小于所属区域云计算平台能够获取交通环境信息的地理范围;
26、所述边缘云计算平台通过通信网络与所属区域的路侧基础设施建立有通信连接,所述路侧基础设施包括摄像头、红绿灯、激光雷达、毫米波雷达、路侧单元rsu和多功能传感器;所述边缘云计算平台还通过所述通信网络与所属区域的智能网联车辆建立有通信连接。
27、优选的,所述中心云计算平台中包括负载均衡模块,所述负载均衡模块用于实时监控所述多个区域云计算平台的负载大小,以便根据所述多个区域云计算平台的负载情况进行任务划分。
28、本说明书一个实施例至少能够达到以下有益效果:本发明技术方案中,当智能网联车辆不能仅依靠自身搭载的车载传感器对驾驶环境信息进行充分感知以完成驾驶决策,或者由于自身算力不足等因素不能进行驾驶决策或驾驶控制时,可以辅助以车辆周边的路侧感知设备对广域视角的驾驶环境信息的感知能力,将智能网联车辆自身搭载的传感器所感知的局部视角的驾驶环境感知信息和路侧感知设备所感知的广域视角的驾驶环境信息,在云控平台处将不同来源的异构数据进行充分的数据融合,进而可以根据智能网联车辆的具体需求向车辆发送相应的驾驶反馈信息,这相较于单车基于局部视角的感知数据所做的规划决策更加高效和准确。
- 还没有人留言评论。精彩留言会获得点赞!