一种仅基于移动交通检测数据的交通状态估计方法与流程
本发明涉及一种仅基于移动交通检测数据的交通状态估计方法,用于满足高速公路上先进交通管控对高精度交通状态信息的需求,依据网联车提供的交通检测数据,按需要的时空颗粒度精确推算高速公路全程的交通流变量,属于智能交通。
背景技术:
1、高速公路交通状态估计(traffic state estimation,tse)是依据有限、局部、富含噪声的交通检测信息按需要的时空颗粒度实时估计高速公路全程交通流状态。实施精准交通管控需要获取高时空颗粒度和准确度的交通状态数据,而目前高速公路上固定检测器直接提供的交通状态数据无法达到要求,因此,实时、准确、全息的高速公路交通状态估计是实现这一数据目标的重要途径。目前大部分交通状态估计方法依赖于固定检测器数据,如专利文献cn 107123265 a中设计的交通状态估计方法可以支持不同类型的高速公路固定检测器数据,专利文献cn 115775452a基于固定和移动交通监测数据进行交通状态估计,专利文献cn 106251630a融合手机信令数据和微波检测器数据进行交通状态估计。固定检测器能够提供局域交通流量和平均速度等信息,是目前进行高速公路交通状态估计的主要数据来源,但它有着一定弊端,它需要政府投资、监管、维护,在使用过程中有一定的故障率,且由于固定检测器数量有限,其数量变化对交通监控效果有较为明显的影响,为维护其运行需要投入较大的人力物力。随着智能网联技术的发展,越来越多私家车可以扮演移动检测器的角色,在交通流中,移动检测器的数量会越来越多,只要网联车占比高于一定比例,少量的移动检测器损坏对于整体估计性能的影响不大,也就是说,交通监控系统的性能对移动检测器的数量不再特别敏感,因此,移动检测器替代固定检测器很可能成为一种必然趋势。如专利文献cn113362600a中使用网联车数据进行交通状态估计。
2、在当前的仅基于网联车所提供的移动检测数据做交通状态估计的研究中,往往无法达到较高的时空精度,或是受限于某些特殊条件,难以保证通用性。因此,提出一种新的仅基于移动交通检测数据的交通状态估计方法,对于实现精准高速公路交通管控有着重要意义。
技术实现思路
1、为了实现精准高速公路交通管控,克服传统固定检测器的弊端以及上述现有研究的不足,本发明提供一种仅基于移动交通检测数据的交通状态估计方法,利用网联车提供的速度、间距、车长信息,结合metanet模型与扩展卡尔曼滤波,实现高速公路交通状态估计。
2、本发明采用方法的具体实现方式如下:
3、一种仅基于移动交通检测数据的交通状态估计方法,该方法包括以下步骤:
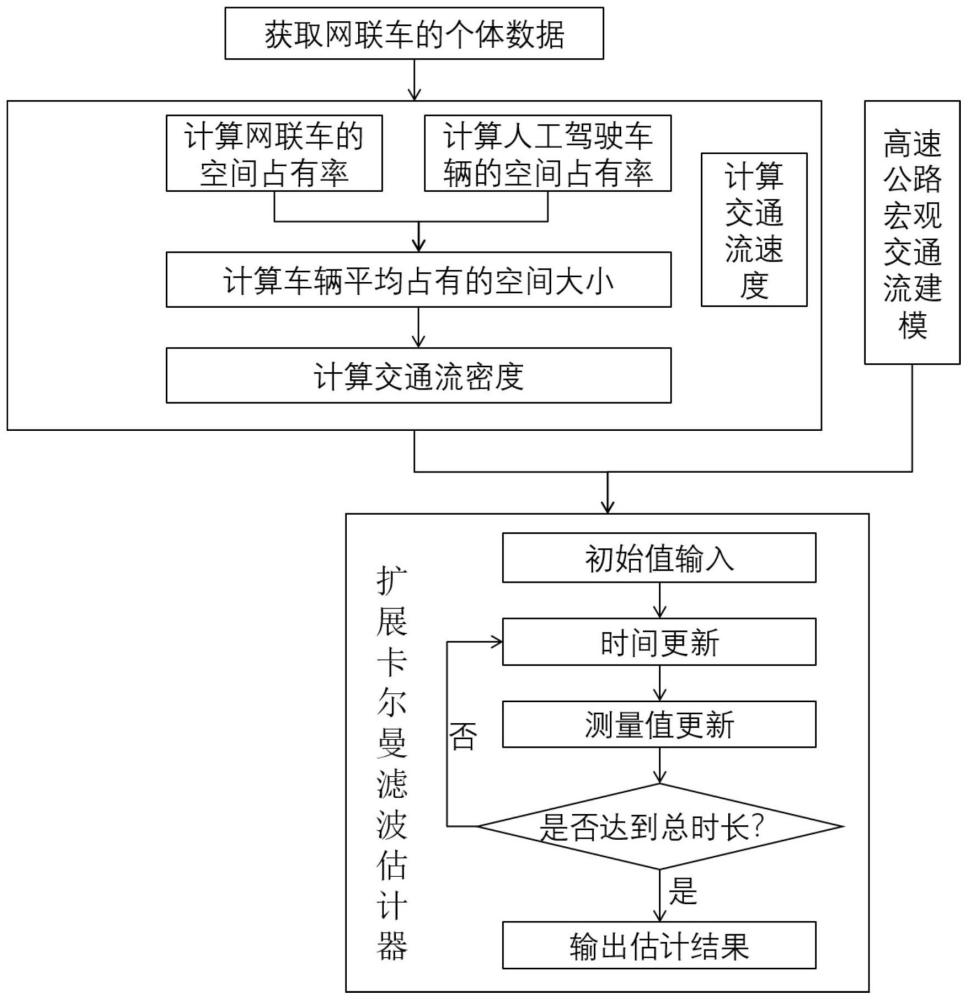
4、s1:将需要交通状态估计的路段和时间段预先进行时空离散化,针对离散化后的每个区段获取区段内不同历史时刻网联车的个体数据;所述网联车的个体数据包括由移动交通检测器获取的网联车的瞬时速度、前车间距和车长;
5、s2:将所述网联车的个体数据输入到交通状态估计算法中,得到不同历史时刻的路段状态值作为实时检测数据;所述路段状态值包含每个区段内的交通流密度和区段内所有车辆的平均速度;
6、s3:基于二阶metanet模型进行高速公路宏观交通流建模,得到动态交通流模型;
7、s4:基于扩展卡尔曼滤波估计器并耦合动态交通流模型和实时检测数据,利用二阶metanet模型对所述路段状态值进行扩展卡尔曼滤波,最终得到路段内各区段在不同历史时刻修正后的交通状态。
8、作为优选,输入到交通状态估计算法中的个体数据为所有区段的网联车的个体数据,每个区段的网联车个体数据包含:当前区段内网联车i在时刻k的瞬时速度vi(k)、当前区段内网联车i在时刻k的前车间距gi(k)、当前区段内网联车i在时刻k的车长为网联车集合,c为需要进行交通状态重新估计的历史时间段。
9、作为优选,所述s1中,进行时空离散化时,需要交通状态估计的路段被分为一系列长度300米到600米的区段,需要交通状态估计的时间段被分割为时长5~10s的时间步,相邻时刻间隔1个时间步。
10、作为优选,所述交通状态估计算法中,针对每个区段,由网联车占有的空间总长度计算得到网联车的空间占有率,并近似估算常规人工驾驶车辆的空间占有率,进而利用两个占有率估算车辆平均占有的空间大小,最终得到交通流密度估计值;同时,基于“速度一致性假设”,使用区段内所有网联车的平均速度来近似计算该区段所有车辆的平均速度。
11、作为优选,对于路段内的任意区段,所述交通状态估计算法估计k时刻的交通流密度和区段内所有车辆平均速度的方法如下:
12、s21:计算网联车辆所占有空间长度
13、
14、其中,lcv(k)为当前区段内k时刻所有网联车占据的空间总长度,scv,i(k)为当前区段内k时刻第i辆网联车占据的空间长度,ncv(k)为当前区段内k时刻网联车总数;
15、s22:计算平均每辆网联车占有的空间计算式为:
16、
17、s23:计算网联车的空间占有率θcv(k),计算式为:
18、
19、其中,l=lcv(k)+lhv(k)为当前区段的总长度,lhv(k)为当前区段内k时刻所有常规人工驾驶车辆占据的空间总长度;
20、s24:以网联车cv之后跟驰一辆人工驾驶汽车hv形成的两车组合作为一个hv-cv组合,统计当前区段中hv-cv组合的数量,计算涉及的常规人工驾驶汽车占用的总空间lcv,hv(k),计算式为:
21、
22、其中,ncv,hv(k)表示在当前区段内k时刻的hv-cv组合数,shv,i(k)为当前区段内k时刻第i辆常规人工驾驶汽车占据的空间长度;
23、s25:计算区段内每辆常规人工驾驶汽车占据的平均空间计算式为:
24、
25、s26:计算常规人工驾驶汽车的空间占有率θhv(k),计算式为:
26、
27、s27:计算当前区段中所用车辆平均占有的空间计算式为:
28、
29、s28:计算当前区段的交通流密度ρ(k),计算式为:
30、
31、s29:基于“速度一致性假设”,以区段内所有网联车的平均速度作为近似,得到当前区段内所有车辆的平均速度计算式为:
32、
33、其中,表示当前区段内k时刻所有网联车的平均速度,表示当前区段内k时刻第i辆网联车的瞬时速度。
34、作为优选,所述s3中,基于二阶metanet模型建模得到的动态交通流模型包含守恒方程、输运方程、动态速度方程和稳态速度-密度关系,由以下方程构成:
35、
36、si(k)=βi(k)qi-1(k)
37、
38、
39、
40、其中,ρi(k)为k时刻区段i的交通流密度,vi(k)为k时刻区段i内所有车辆的平均速度,qi(k)为k时刻区段i的流量,ri(k)为k时刻区段i的入口匝道流量,si(k)为k时刻区段i的出口匝道流量,βi(k)为k时刻区段i的出匝率,δi为区段i的长度,λi为区段i的车道数;和分别为零均值高斯白噪声;ρcr为临界密度;vf为自由流速度;对于整条路段的每个区段而言,模型参数τ、υ、κ、δ、a都赋予相同的值,其中τ、υ、κ、δ为固定值,a需要在不同时刻进行更新。
41、作为优选,所述s4中,利用metanet模型对所述路段状态值进行扩展卡尔曼滤波,最终得到各个路段的交通状态的步骤包括:
42、s41:令初始时刻k=0,利用预设的交通状态初始值x(0)和误差协方差p(0),对初始时刻的交通状态估计值和误差协方差进行参数初始化;其中交通状态初始值x(0)由两部分组成,第一部分为作为实时检测数据的路段状态值,第二部分为动态交通流模型参数;
43、s42:执行卡尔曼增益更新:
44、k(k)=[a(k)p(k|k-1)ct(k)+γ(k)m(k)∑t(k)][c(k)p(k|k-1)ct(k)+∑(k)r(k)σt(k)]-1
45、其中,上标t均表示矩阵转置;k(k)是增益矩阵;q(k)为状态值的协方差,为对称的半正定矩阵;m(k)为交叉协方差矩阵;r(k)为测量值的协方差,为对称的半正定矩阵;a(k)、γ(k)、c(k)和σ(k)分别表示对应非线性状态方程的一阶泰勒展开式,公式为:
46、
47、
48、
49、
50、式中:和表示函数f分别对x和ξ的偏导数,和表示函数g分别对交通状态x和噪声ξ的偏导数;且函数f为利用k时刻的交通状态x和噪声ξ的状态估计函数,即基于二阶metanet模型建模得到的动态交通流模型;函数g为对交通检测进行建模的非线性向量函数,函数功能为从交通状态x中提取出所述第一部分;
51、在执行误差协方差的更新:
52、
53、s43:以s2中得到的各个区段内的交通流密度和各个区段内所有车辆的平均速度作为实际测量值y(k),对下一时刻的交通状态估计值进行更新:
54、
55、其中,代表x(k+1)在第k时刻测量值条件下的数学期望。
56、s44:判断当前的时刻k是否达到需要执行的交通状态估计的时间段总时长t,若尚未达到则令k=k+1后继续循环执行s42~s43,否则结束循环完成交通状态估计,输出路段中所有历史时刻的。
57、作为优选,所述动态交通流模型参数包含自由流速度vf、临界密度ρcr、模型参数a、匝道区段的入口匝道流量ri(k)和出匝率βi(k)。
58、相对于现有技术而言,本发明的有益效果如下:
59、本发明提供了一种仅基于移动交通检测数据的交通状态估计方法,区别于传统的需要固定检测器数据的交通状态估计方法,本发明可仅基于移动检测数据进行交通状态估计,进而修正实测数据中因为检测器数量过少导致的估计不准确问题。本发明亦可用于探究网联车密度达到多少之后能够相对稳定地仅使用移动检测数据进行交通状态估计,由于将来网联车的数量会远大于目前的固定检测器的数量,因此本发明在节约成本的同时有望得到更优的估计效果。
- 还没有人留言评论。精彩留言会获得点赞!