一种融合动态交互安全的多车协同速度优化方法
本发明涉及交通控制领域,尤其是涉及一种融合动态交互安全的多车协同速度优化方法。
背景技术:
1、当前,随着自动驾驶技术的不断发展和普及,多车交互与协同控制的问题备受关注。在传统的车辆行驶环境中,驾驶员主要依赖视觉和听觉等感知方式,通过与同一交通场景下的其他车辆进行信息交互,以实现安全协同驾驶。
2、随着车辆智能化水平的提高和交通网联程度的逐步加深,基于多车交互和云端协同控制的自动驾驶车辆多车协同速度优化成为研究的热点。引入外部多源信息使得车辆能够更加准确地优化行驶速度,从而确保车辆间的动态交互安全,并提升道路整体通行效率。然而,过于激进的竞争驾驶可能导致潜在的安全风险,甚至可能引发车辆之间的碰撞;过于保守的协商驾驶也可能导致道路通行效率的降低。
3、因此,提出一种可以保证车辆交互安全的多车协同控制方法对于自动驾驶技术是十分必要的。
技术实现思路
1、本发明的目的就是为了克服上述现有技术存在的缺陷而提供一种融合动态交互安全的多车协同速度优化方法。
2、本发明的目的可以通过以下技术方案来实现:
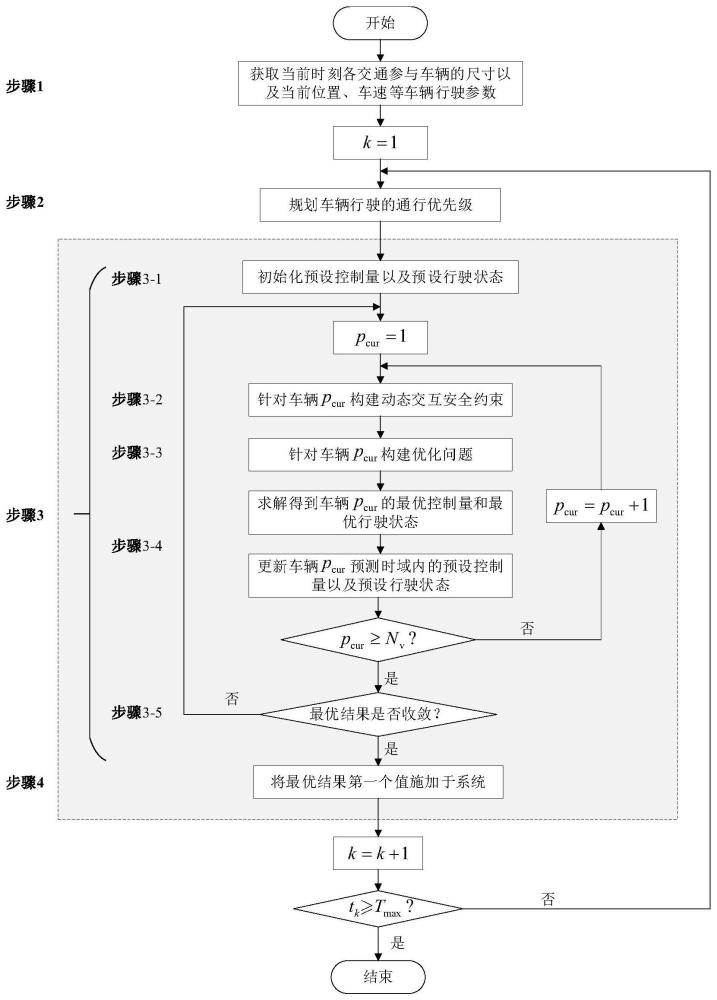
3、一种融合动态交互安全的多车协同速度优化方法,包括以下步骤:
4、s1:获取当前时刻各交通参与车辆的当前位置和行驶参数;
5、s2:根据各交通参与车辆的当前位置及行驶参数规划车辆行驶的通行优先级;
6、s3:构建动态交互安全的约束和行驶优化问题,所述约束包括防止碰撞的硬约束和表征车辆交互距离的软约束,根据通行优先级依次求解行驶优化问题,得到当前时刻各车辆在预测时域内的最优控制量;
7、s4:将预测时域内的最优控制量施加于车辆行驶系统,优化车辆行驶状态,更新当前时刻各交通参与车辆的位置和行驶参数后,返回步骤s1,实现闭环控制。
8、进一步地,步骤s2包括:
9、s21:选择一个交通参与车辆,以该车辆当前时刻的行驶方向作为y轴,车辆中心点为原点,行驶方向的水平面内垂直方向为x轴,建立车辆局部坐标系,计算其余交通参与车辆此时在该坐标系下的相对方向角和相对航向角;
10、s22:对所有交通参与车辆进行通行优先级排序,得到通行优先级序列。
11、进一步地,计算其余交通参与车辆此时在该坐标系下的相对方向角的计算表达式为:
12、
13、式中,βm,n为车辆n相对车辆m的方向角,为所选车辆m的当前航向角,为计算车辆n的当前横、纵坐标,为所选车辆m的当前横、纵坐标,tan-1(·)为反正切函数;相对航向角的计算表达式为:
14、
15、式中,θm,n为计算车辆n相对车辆m的航向角,为计算车辆n的当前航向角。
16、进一步地,对所有交通参与车辆进行通行优先级排序表达式为:
17、
18、式中,m<n表示车辆m的通行优先级比车辆n高;m>n表示车辆m的通行优先级比车辆n低;m~n表示车辆m与车辆n的通行优先级相同。
19、进一步地,步骤s3包括:
20、s31:设置各交通参与车辆在预测时域内的预设控制量以及预设行驶状态,并将优先级最高的车辆作为当前优化车辆;
21、s32:针对当前优化车辆构建动态交互安全约束,包括防止碰撞的硬约束以及表征车辆交互距离的软约束;
22、s33:针对当前优化车辆构建优化问题,包括优化问题的代价函数;
23、s34:基于代价函数求解优化问题,得到最优控制量及最优行驶状态,更新当前车辆的预测时域内的预设控制量以及预设行驶状态;
24、s35:将下一优先级车辆作为当前优化车辆,重复步骤s32-s34,直到当前车辆优先级为最低,根据预先设置的收敛条件判断当前状态是否收敛,已收敛情况下,此时的各交通参与车辆在预测时域内的预设控制量,为当前时刻预测时域内的最优控制量,继续步骤s4;未收敛情况下,回到步骤s31。
25、进一步地,设置各车辆预测时域内的预设控制量以及预设行驶状态的方法为,基于车辆当前坐标,寻找预设行驶轨迹内与当前位置最近的点,计算车辆当前位置在预设行驶轨迹内所处的当前行驶距离,设置各车辆预测时域内的预设控制量a{m}(i|k)=0,i=0,1,…,np-1,预设行驶状态量s{m}(i|k),v{m}(i|k),i=1,2,…,np,np为预测时域,k为第k个时刻,即当前时刻,利用车辆当前行驶距离当前行驶车速以及预设控制量计算得到,计算表达式为:
26、
27、式中,δt为离散控制时间间隔,根据车辆预设行驶状态量s{m}(i|k)计算车辆预设行驶坐标x{m}(i|k)、y{m}(i|k)以及车辆预设行驶航向角α{m}(i|k),(i|k)表示在当前k时刻下,对k+i时刻的变量值的预测,计算表达式为:
28、
29、式中,为车辆的预设行驶轨迹。
30、进一步地,构建动态交互安全约束的方法为:计算当前优先级车辆的潜在区域尺寸参数计算表达式为:
31、
32、式中,cf,p、cr,p、cw,p为潜在区域扩大系数,为当前优先级车辆的预设行驶坐标、预设航向角、车辆尺寸参数;
33、计算k+i时刻下当前优化车辆mcur与其余车辆(以车辆n为例)的交互区域重叠面积以及车辆潜在交互区域重叠面积计算表达式为:
34、
35、
36、式中,为车辆mcur的交互区域面积,为车辆mcur的潜在交互区域面积,为在当前优化车辆mcur的车辆交互区域内均匀取个点,为其中处在车辆n交互区域中的点的个数,为在当前优化车辆mcur的车辆潜在交互区域内均匀取个点,为其中处在车辆n潜在交互区域中的点的个数,k为第k个时刻,即当前时刻,i代表时间间隔;
37、基于交互区域重叠面积计算防止碰撞的硬约束计算表达式为:
38、
39、基于车辆潜在交互区域重叠面积计算表征k+i时刻车辆交互距离的软约束jd(i|k),计算表达式为:
40、
41、进一步地,针对当前优化车辆构建优化问题为:根据当前优化车辆mcur的动力性要求获取最小减速度最大加速度以及最大车速构建控制变量约束以及最大车速约束:
42、
43、
44、根据当前优化车辆mcur的前方道路限速构建道路限速约束:
45、
46、在k时刻,对于当前优化车辆mcur,构建优化问题中的代价函数为:
47、
48、式中,jd(i+1|k)为车辆交互安全性指标,ωd为对应的控制权重;为车辆行驶舒适性指标,ωa为对应控制权重;je(np|k)为车辆行驶快速性指标,计算表达式为:
49、
50、式中为步骤s31中计算的车辆当前行驶距离;为当前时刻车辆在以最大车速行驶的情况下,预测时域内能到达的最远的距离,计算表达式为:
51、
52、式中,np为预测时域,δt为离散控制时间间隔。
53、进一步地,最优控制量及最优行驶状态的求解过程为:
54、当前迭代次数kiter=1时,将当前优化车辆mcur以及其余车辆在预测时域内的预设控制量以及预设行驶状态代入代价函数中,计算当前优化车辆的预设代价
55、建立当前优化车辆mcur在k时刻的优化问题,计算表达式为:
56、
57、求解上述优化问题得到最优控制量及最优行驶状态,将求解得到的最优控制量及最优行驶状态代入代价函数中,计算当前最优结果对应的代价当时,则并将求解得到的最优控制量及最优行驶状态更新到此车辆预设控制量以及预设行驶状态中,同时将最优结果对应的代价更新到预设代价中,计算表达式为:
58、
59、
60、
61、
62、同时,根据车辆预设行驶状态量更新计算车辆预设行驶坐标以及车辆预设行驶航向角(i|k)表示在当前k时刻下,对k+i时刻的变量值的预测,计算表达式为:
63、
64、式中,为车辆的预设行驶轨迹,np为预测时域。
65、进一步地,预先设置的收敛条件包括:
66、本次迭代中所有车辆都没有进行最优结果的更新,即此时对所有车辆m∈{1,2,…,nv},有预设代价
67、迭代次数kiter≥kmax,iter,kmax,iter为预先设置的最大迭代次数。
68、与现有技术相比,本发明具有以下有益效果:
69、1)本发明通过构建针对多车交互的动态交互安全约束,其中包含防止碰撞的硬约束以及表征车辆交互距离的软约束,实现针对车辆间安全交互以及潜在冲突可能性的定量表征,使本发明方法能够得到在安全范围内的最佳行驶策略,在保证行驶安全的前提下实现交通效率的整体提升。
70、2)本发明提出了基于实时数据的多车协同速度实时优化方法,可以在不同复杂工况中实现交通流中多个车辆的协同控制,可移植性强。
71、3)本发明在求解大规模协同优化控制问题时,采用分布式优化框架,大幅降低了优化问题的复杂度,减少计算量。
- 还没有人留言评论。精彩留言会获得点赞!