飞机降落机场预测方法、系统、电子设备及存储介质与流程
本公开涉及数据处理,尤其涉及一种飞机降落机场预测方法、系统、电子设备及存储介质。
背景技术:
1、ads-b系统(广播式自动相关监视系统)通常由多地面站和机载站构成,以网状、多点对多点方式完成数据双向通信。它主要实施空对空监视。ads-b系统是一个集通信与监视于一体的信息系统,由信息源、信息传输通道和信息处理与显示三部分组成。
2、当前,ads-b系统中的ads-b数据大多被应用于航迹切分、数据融合等方面,不能针对空中目标的行为进行预测分析。
技术实现思路
1、有鉴于此,本公开的目的在于提出一种飞机降落机场预测方法、系统、电子设备及存储介质,实现了对飞机终点的预测,实现对飞机行为的动态掌握,提升对空中目标的态势感知能力,可以在战时提供作战支撑。
2、为了实现上述公开目的之一,本公开实施方式提供了一种飞机降落机场预测方法,包括:
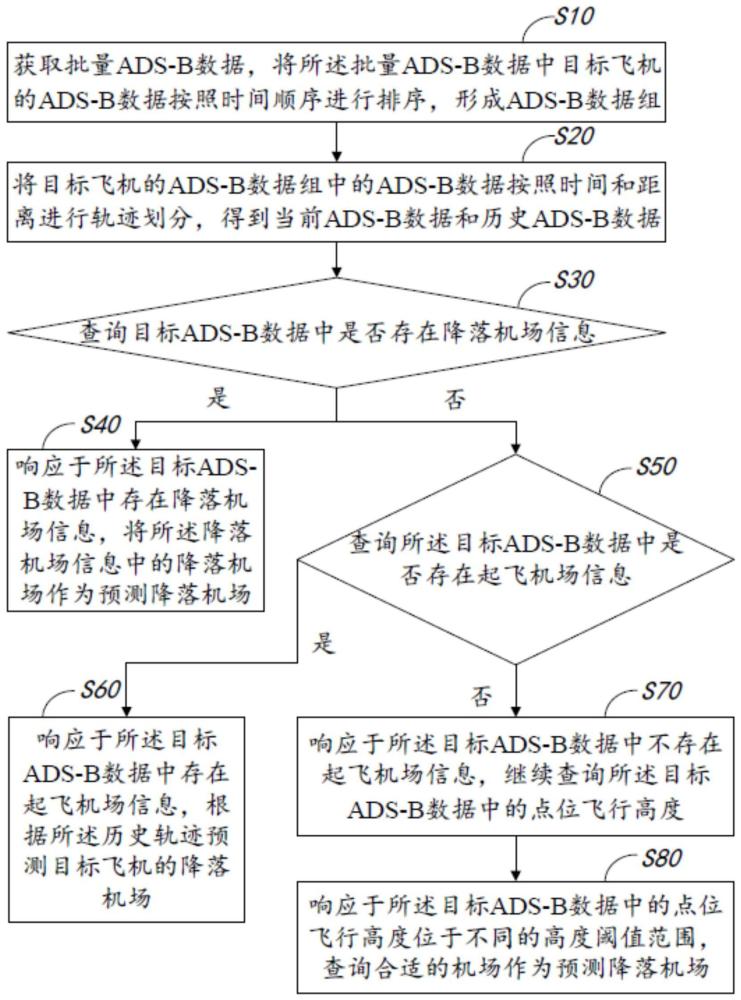
3、获取批量ads-b数据,将所述批量ads-b数据中目标飞机的ads-b数据按照时间顺序进行排序,形成ads-b数据组;
4、将目标飞机的ads-b数据组中的ads-b数据按照时间和距离进行轨迹划分,得到当前ads-b数据和历史ads-b数据;其中,所述当前ads-b数据为目标飞机的当前轨迹对应的ads-b数据,所述历史ads-b数据为目标飞机的历史轨迹对应的ads-b数据;
5、查询目标ads-b数据中是否存在降落机场信息;其中,所述目标ads-b数据为所述当前ads-b数据中时间最晚的ads-b数据;
6、响应于所述目标ads-b数据中存在降落机场信息,将所述降落机场信息中的降落机场作为预测降落机场;
7、响应于所述目标ads-b数据中不存在降落机场信息,继续查询所述目标ads-b数据中是否存在起飞机场信息;
8、响应于所述目标ads-b数据中存在起飞机场信息,根据所述历史轨迹预测目标飞机的降落机场;
9、响应于所述目标ads-b数据中不存在起飞机场信息,继续查询所述目标ads-b数据中的点位飞行高度;
10、响应于所述目标ads-b数据中的点位飞行高度位于不同的高度阈值范围,查询合适的机场作为预测降落机场。
11、作为本公开一实施方式的进一步改进,所述将目标飞机的ads-b数据组中的ads-b数据按照时间和距离进行轨迹划分,得到当前ads-b数据,包括:
12、查询目标飞机的ads-b数据组中任意两个相邻的ads-b数据的时间差;
13、响应于所述目标飞机的ads-b数据组中存在两个相邻的ads-b数据的时间差大于时间阈值,将所述相邻的ads-b数据分别划归两条轨迹,得到所述当前ads-b数据和历史ads-b数据;
14、响应于所述目标飞机的ads-b数据组中不存在两个相邻的ads-b数据的时间差大于时间阈值,继续所述目标飞机的ads-b数据组中任意两个相邻的ads-b数据的距离;
15、响应于所述目标飞机的ads-b数据组中存在两个相邻的ads-b数据的距离大于距离阈值,将所述相邻的ads-b数据分别划归两条轨迹,得到所述当前ads-b数据和历史ads-b数据;
16、响应于所述目标飞机的ads-b数据组中不存在两个相邻的ads-b数据的距离大于距离阈值,判定所述目标飞机的ads-b数据组中的所有ads-b数据均为当前ads-b数据。
17、作为本公开一实施方式的进一步改进,所述响应于所述目标ads-b数据中存在起飞机场信息,根据所述历史轨迹预测目标飞机的降落机场,包括:
18、查询所述目标ads-b数据中的起飞机场在所述历史轨迹中对应的历史常用降落机场;
19、响应于所述目标ads-b数据中的起飞机场对应唯一的历史常用降落机场,继续判断所述唯一的历史常用降落机场是否位于所述当前轨迹的方向范围中;
20、响应于所述唯一的历史常用降落机场位于所述当前轨迹的方向范围中,将所述唯一的历史常用降落机场作为预测降落机场;
21、响应于所述目标ads-b数据中的起飞机场对应多个历史常用降落机场,将所述多个历史常用降落机场中位于所述当前轨迹的方向范围中且距离最近的机场作为预测降落机场。
22、作为本公开一实施方式的进一步改进,所述响应于所述目标ads-b数据中的点位飞行高度位于不同的高度阈值范围,查询合适的机场作为预测降落机场,包括:
23、响应于所述目标ads-b数据中的点位飞行高度小于第一高度阈值,查询所述目标ads-b数据中以位置信息为中点的第一半径范围内的待选机场,判断所述待选机场中是否存在所述目标ads-b数据所属飞机的历史常用降落机场;
24、响应于所述待选机场中存在所述目标ads-b数据所属飞机的历史常用降落机场,将所述历史常用降落机场作为预测降落机场;
25、响应于所述待选机场中不存在所述目标ads-b数据所属飞机的历史常用降落机场,通过所述目标ads-b数据所属飞机的军民属性和所需的跑道规格从所述待选机场中选择合适的机场作为预测降落机场。
26、作为本公开一实施方式的进一步改进,响应于所述目标ads-b数据中的点位飞行高度位于不同的高度阈值范围,查询合适的机场作为预测降落机场,还包括:
27、响应于所述目标ads-b数据中的点位飞行高度大于等于第一高度阈值,根据所述目标ads-b数据中的点位飞行高度位于不同的高度阈值范围,查询所述目标ads-b数据中以位置信息为中点的不同半径范围内的待选机场,并通过所述目标ads-b数据所属飞机的军民属性和所需的跑道规格从所述待选机场中选择合适的机场作为预测降落机场。
28、作为本公开一实施方式的进一步改进,所述根据所述目标ads-b数据中的点位飞行高度位于不同的高度阈值范围,查询所述目标ads-b数据中以位置信息为中点的不同半径范围内的待选机场,包括:
29、当所述目标ads-b数据中的点位飞行高度大于等于第一高度阈值,且小于第二高度阈值时,查询所述目标ads-b数据中以位置信息为中点的第二半径范围内的待选机场;
30、当所述目标ads-b数据中的点位飞行高度大于等于第二高度阈值,且小于第三高度阈值时,查询所述目标ads-b数据中以位置信息为中点的第三半径范围内的待选机场;
31、当所述目标ads-b数据中的点位飞行高度大于等于第三高度阈值,且小于第四高度阈值时,查询所述目标ads-b数据中以位置信息为中点的第四半径范围内的待选机场;
32、当所述目标ads-b数据中的点位飞行高度大于等于第四高度阈值,查询所述目标ads-b数据中以位置信息为中点的第五半径范围内的待选机场。
33、作为本公开一实施方式的进一步改进,所述第一高度阈值为1000m;所述第二高度阈值为3000m;所述第三高度阈值为6000m;所述第四高度阈值为8000m;
34、所述第一半径范围为小于200km;所述第二半径范围为小于100km;所述第三半径范围为大于20km,小于180km;所述第四半径范围为大于50km,小于300km;所述第五半径范围为大于80km,小于500km。
35、为了实现上述公开目的另一,本公开另一实施方式还公开了一种飞机降落机场预测系统,其包括:
36、获取模块,获取批量ads-b数据,将所述批量ads-b数据中目标飞机的ads-b数据按照时间顺序进行排序,形成ads-b数据组;
37、轨迹划分模块,用于将目标飞机的ads-b数据组中的ads-b数据按照时间和距离进行轨迹划分,得到当前ads-b数据和历史ads-b数据;其中,所述当前ads-b数据为目标飞机的当前轨迹对应的ads-b数据,所述历史ads-b数据为目标飞机的历史轨迹对应的ads-b数据;
38、查询模块,用于查询目标ads-b数据中是否存在降落机场信息;其中,所述目标ads-b数据为所述当前ads-b数据中时间最晚的ads-b数据;
39、第一响应模块,用于响应于所述目标ads-b数据中存在降落机场信息,将所述降落机场信息中的降落机场作为预测降落机场;
40、第二响应模块,用于响应于所述目标ads-b数据中不存在降落机场信息,继续查询所述目标ads-b数据中是否存在起飞机场信息;
41、第三响应模块,用于响应于所述目标ads-b数据中存在起飞机场信息,根据所述历史轨迹预测目标飞机的降落机场;
42、第四响应模块,用于响应于所述目标ads-b数据中不存在起飞机场信息,继续查询所述目标ads-b数据中的点位飞行高度;
43、第五响应模块,用于响应于所述目标ads-b数据中的点位飞行高度位于不同的高度阈值范围,查询合适的机场作为预测降落机场。
44、为了实现上述公开目的另一,本公开另一实施方式还公开了一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现上述任意一项所述的飞机降落机场预测方法。
45、为了实现上述公开目的另一,本公开另一实施方式还公开了一种非暂态计算机可读存储介质,所述非暂态计算机可读存储介质存储计算机指令,所述计算机指令用于使计算机执行上述任一所述的飞机降落机场预测方法。
46、相对于现有技术,本公开提供的飞机降落机场预测方法可以实现对飞机终点的预测,实现对飞机行为的动态掌握,提升对空中目标的态势感知能力,可以在战时提供作战支撑。
- 还没有人留言评论。精彩留言会获得点赞!