一种用于停车场的辅助停车方法与流程
本发明涉及停车场泊车,具体涉及一种用于停车场的辅助停车方法。
背景技术:
1、随着国内消费者购买力的不断提升与制造业的飞速发展,国内汽车的保有量和种类逐年提升,停车需求也在日益增加。为了缓解停车问题,一些线上停车平台会登记停车场的停车位,以便于车主查询空余车位和提前预约,但是对于一些地形较为复杂或者较为大型的停车场,车主仍会在寻找指定车位上花费大量的时间,而车位的排布情况也会较为复杂,很多新手驾驶员、甚至是老司机,在停车场停车时需要耗费大量的时间,甚至会出现碰擦的情况,严重影响车辆停放的效率,而在停车高峰期时,低效率的寻车和停车会严重影响停车场范围内的交通拥堵,进一步加剧车主在停车场中消耗的时间。
2、中国专利“一种智能平板式泊车机器人”(专利号:cn108824899a)提出一种平板式泊车机器人的机械结构,通过麦克纳姆轮与全向从动轮的组合,在实现全向移动的同时保证了较高的稳定性和较强的承载能力,通过一种移动式夹抱机构和举升机构,在实现无辅助机械装置条件下搬运车辆的同时保证了较高的尺寸适应性。
3、目前现有技术中基于泊车机器人的停车方法通常是停车场内部为无人状态的,车主只需在待停车区或者待取车区进行人机交互即可,但是这种方法需要对停车场进行全面建设,投入较大,且并非用于现有的传统停车场的停车辅助方法。
4、基于此,研究一种用于停车场的辅助停车方法是必要的。
技术实现思路
1、鉴于此,本发明的目的在于提供一种用于停车场的辅助停车方法,可以有效地解决车主在停车场中停车需要耗费大量时间的问题。
2、为实现上述目的,本发明所采用的技术方案是:
3、一种用于停车场的辅助停车方法,包括以下步骤:
4、s100:车主停车服务申请;
5、车主将待停车辆停放在交换位或者临时交换位上;
6、车主通过移动终端发起停车服务申请,并将待停车辆位置信息及指定车位的车位号发送至控制站;
7、s200:控制站处理停车服务申请;
8、控制站收到停车服务申请后,通过车场地图及泊车机器人的任务情况判断泊车机器人的可用性;
9、控制站指派一空闲的泊车机器人负责转运该待停车辆,并将该待停车辆位置信息及指定车位的车位号发送给泊车机器人;
10、控制站将泊车机器人的实时位置信息发送至车主的移动终端;
11、s300:泊车机器人转运车辆;
12、泊车机器人前往指定的交换位或者临时交换位对接待停车辆;
13、泊车机器人对接到待停车辆后,同步待停车辆的位置信息至控制站;
14、泊车机器人搬运待停车辆前往指定车位,控制站将泊车机器人和待停车辆的实时位置信息同步至车主的移动终端;
15、s400:服务完成;
16、泊车机器人将车辆成功停放在指定车位后,泊车机器人同步待停车辆的位置信息,泊车机器人进入空闲状态。
17、根据权利要求2所述的一种用于停车场的辅助停车方法,其特征在于:所述步骤s300与步骤s400之间还包括以下步骤:
18、s350:指定车位异常处理;
19、泊车机器人搭载有激光雷达和摄像头模块,在抵达待停车辆时,会先测量待停车辆的尺寸参数,在抵达指定车位时,会先测量指定车位的尺寸参数,然后根据待停车辆及指定车位的尺寸参数来判断停车的可行性;
20、若泊车机器人判断指定车位存在障碍物或者停车空间不足,则泊车机器人拍摄实况照片反馈至人工服务站,并将待停车辆转运至附近的临时交换位,泊车机器人同步待停车辆的位置信息后中止任务并进入空闲状态;
21、经人工处理后,人工服务站发出指令给控制站,控制站重新指派一空闲状态的泊车机器人继续执行任务;
22、该泊车机器人前往对应临时交换位对接并转运待停车辆。
23、进一步的,所述控制站及泊车机器人具备车辆矫正机制,若人工服务站判断停车空间不足是由于指定车位的旁侧车辆不规范停车而导致时,能人工触发车辆矫正机制,控制站将指派一空闲状态下的泊车机器人矫正旁侧车辆的姿态,矫正后该泊车机器人将继续执行该待停车辆的转运任务。
24、进一步的,所述服务基站提供有取车服务,车主通过移动终端发起取车服务申请,并通过移动终端将待取车辆及取车点的位置信息发送至控制站,控制站指派一空闲的泊车机器人负责转运该待取车辆至指定的交换位,并将泊车机器人及待取车辆的实时位置信息发送至车主的移动终端;当车主确认取车后完成服务,对应的泊车机器人回到空闲状态。
25、进一步的,所述服务基站中布置有换向位,换向位为圆形;所述取车服务中包括有换向服务,若车主需要调整车头朝向,则通过移动终端发起换向服务申请,取车服务中对应的泊车机器人会搬运待取车辆在换向位中进行旋转调头,并在调头后搬运至交换位中。
26、进一步的,当车主或泊车机器人需要使用临时交换位时,移动终端或者泊车机器人会向控制站发出信号,控制站会将该临时交换位标记为忙碌状态;
27、当泊车机器人完成使用后,则发出信号给控制站,控制站标记该临时交换位为空闲状态;
28、当空闲状态下的临时交换位上的位置传感器被触发时,控制台发送报警信号给人工服务站;
29、当临时交换位长时间处于忙碌状态时,控制台发送信号给人工服务站。
30、进一步的,所述服务基站设置在停车场内的入口或出口,服务基站设置有多个,其中一控制站为控制总站;每个服务基站都有对应编号的泊车机器人。
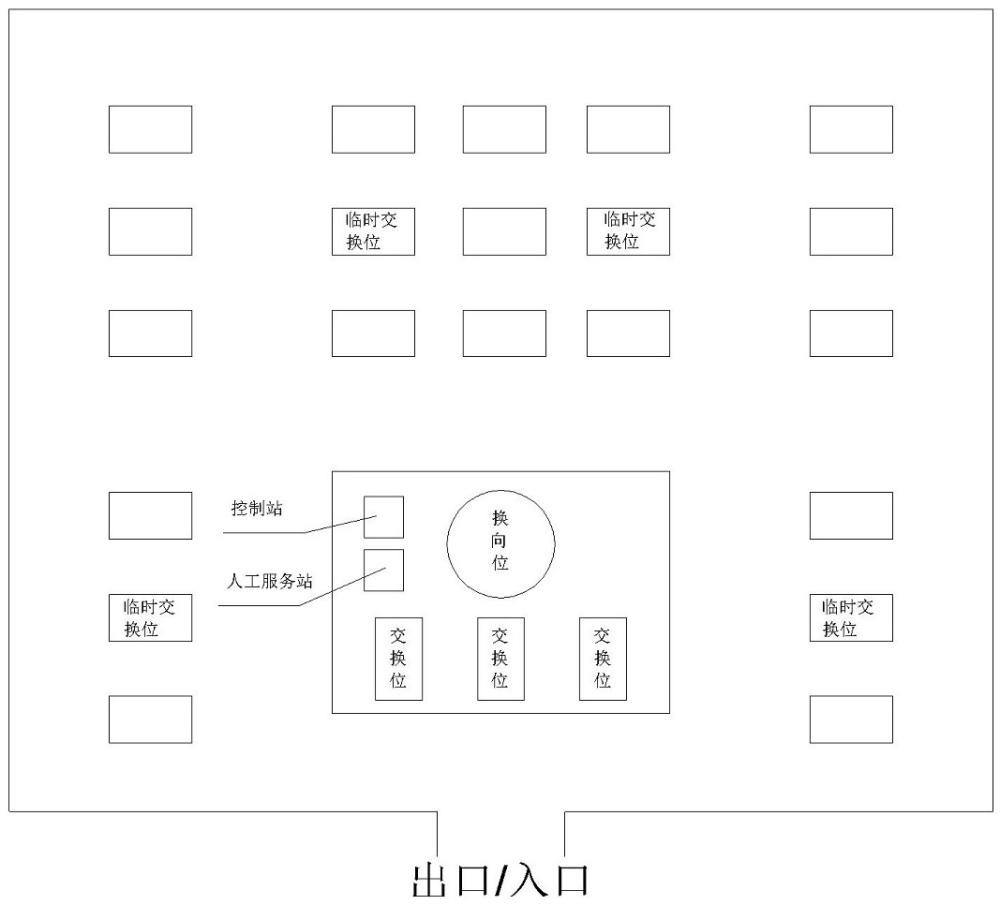
31、一种用于停车场的辅助停车方法的系统,包括服务基站、泊车机器人和临时交换位;
32、服务基站和临时交换位均设置在停车场内,服务基站中配备有多个泊车机器人;
33、所述服务基站包括控制站、交换位和人工服务站,控制站用于指派和调度泊车机器人,并与用户的移动终端进行信息交互;控制站和泊车机器人均记录有车场地图,泊车机器人与控制站联网通信,泊车机器人能够自主将车辆转运至指定位置;
34、所述停车场中布置有多个临时交换位,临时交换位中设置有位置传感器,用于检测临时交换位的占用情况,位置传感器与控制站联网通信。
35、上述技术方案的有益效果是:
36、(1)本发明通过在现有的停车场内设置服务基站和临时停车位,服务基站中配备有泊车机器人,用于转运车辆,若车主认为停车会花费大量时间,可将车辆停放在服务基站中的交换位或者分散在各处的临时交换位上,并通过移动终端发起停车服务申请,服务基站中的控制站会指派泊车机器人将待停车辆转运至指定的车位上,可以避免车主在停车场中寻找指定车位及将车辆正确停放在车位中所消耗的时间,避免车辆擦碰,减少停车场道路的拥堵,从而即提高了使用了停车服务的车主的停车效率,也提高了未使用停车服务的车主的停车效率,具有良好的社会效益。
37、(2)本发明无需对停车场进行全面或大幅度改进,可基于现有的传统停车场,仅需要建设服务基站和临时交换位,不涉及复杂机械结构和额外的建筑物,无需对现有的停车位进行改造,相对于无人的智能停车场,整体改进的成本低廉,具有更好的通用型和经济性。
38、(3)本发明针对有人停车场的复杂情况,设立有人工服务站,用于判断和处理指定车位不适配、被私占等各种异常情况和纠纷,通过人机结合的方式,以确保泊车机器人顺利进行车辆转运。
39、(4)本发明通过设立临时停车位,以便于车主进行寻找和停靠,无需将待停车辆停放在服务基站的交换位中,此外,若泊车机器人转运待停车辆时发现指定车位无法满足停车条件,则可将待停车辆临时放置在临时交换位上,以免影响停车场内的交通。
40、(5)本发明在服务基站中布置有圆形的换向位,主要用于泊车机器人对车辆的朝向进行调整,考虑到车主进行取车时,车头的朝向如果不是朝向出口的,会不便于车主驶离,而泊车机器人或者车主直接在停车场的通道中进行车辆的换向容易引发事故和交通拥堵,泊车机器人通常拥有定点自转的功能,通过将车辆转运至换向位中进行自传换向,能够快速调整车头的朝向,以便于车主驶离,且不影响停车场内的交通,具有良好的安全性和便利性。
- 还没有人留言评论。精彩留言会获得点赞!