隧道施工车辆通行及交通红绿灯管控方法与流程
本技术涉及图像数据处理,具体涉及隧道施工车辆通行及交通红绿灯管控方法。
背景技术:
1、高速公路作为重要的交通施工建筑设施,在缩短运行距离、提高运输能力等方面起到了重要的作用,高速公路隧道在交通状态方面具有交通流量大、行车速度快的特点,但是现阶段由于隧道施工的主要工序是爆破开挖、出渣、初期支护、仰拱及二次衬砌等作业,出于隧道施工进度因素的影响,项目隧道通道比较狭长,洞内空间通常较为狭小,存在交通拥堵和车辆、人员错位而导致的安全风险。同时由于拐弯或其他原因造成进出口车辆存在视觉盲区,不利于大规模车辆调度运输。
2、目前,隧道内交通信号灯主要由施工管理部门控制和调整,但是遇到复杂施工段、交叉路口较多时,现有的信号灯控制方式不够灵活,信号灯的停留时间不尽合理,导致施工车辆经常出现拥堵,甚至造成驾驶员无意识违章现象,车辆调度效率较差,其中对隧道内车辆的监测分析主要依靠采集隧道车辆的图像数据,但隧道内灯光变化和车辆灯光变化的影响是采集的图像的质量低,通过传统的图像降噪算法,例如自适应滤波和维纳滤波等对图像数据进行处理,进而根据处理后的图像提取隧道内车辆的信息的准确度低,影响隧道内车辆通行和交通信号灯的管控。
技术实现思路
1、本技术提供隧道施工车辆通行及交通红绿灯管控方法,以解决隧道交通管控准确性低的问题,所采用的技术方案具体如下:
2、第一方面,本技术一个实施例提供了隧道施工车辆通行及交通红绿灯管控方法,该方法包括以下步骤:
3、应用场景为包含有一条或两条以上平行的隧道正洞,且与隧道正洞斜向交叉的一条以上斜井的隧道施工工区;隧道正洞由两端的掌子面区域构成,所述掌子面区域内设置有与所述斜井交叉连接的路口;在每个所述路口的前设置有车辆测速仪,在每个所述路口的所有行车方向上安装设置有交通提示红绿灯及rfid基站感应器;
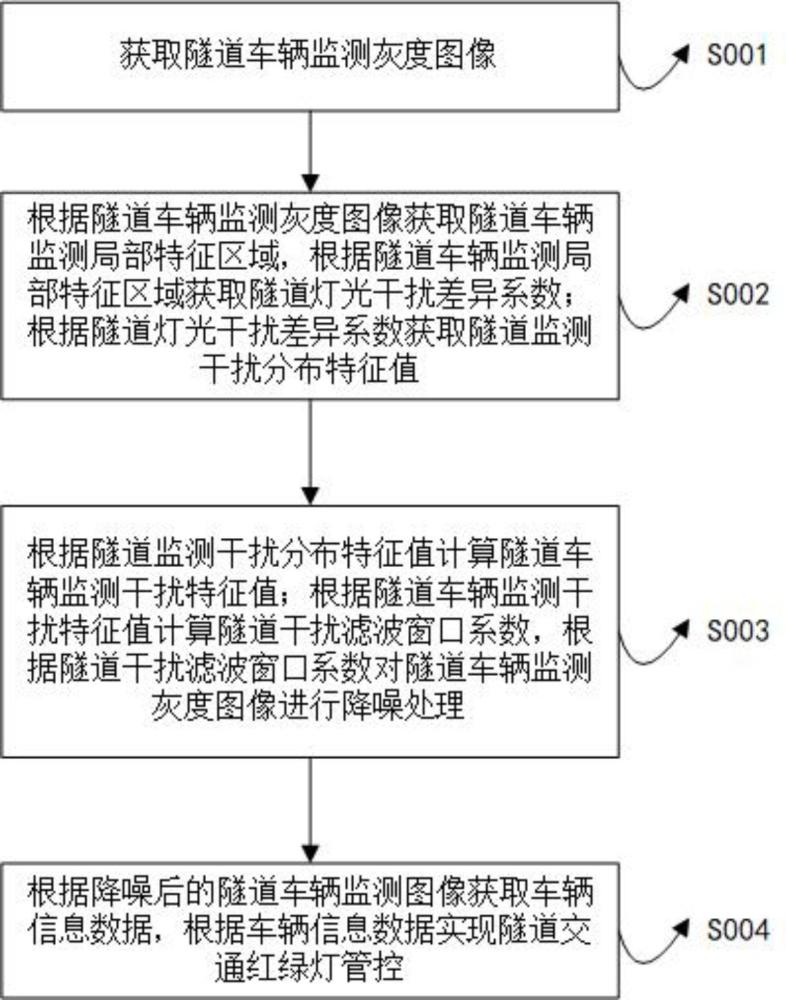
4、通过车辆测速仪获取隧道车辆监测图像,将隧道车辆监测图像转化为灰度图像,将转化后的结果图像作为隧道车辆监测灰度图像;
5、根据隧道车辆监测灰度图像获取隧道车辆监测局部特征区域,基于隧道车辆监测局部特征区域确定每个像素点的近邻特征矩阵;根据隧道车辆监测局部特征区域中每个像素点的近邻特征矩阵获取每个像素点的车辆监测局部线性特征对;根据隧道车辆监测局部特征区域中每个像素点的车辆监测局部线性特征对计算每个像素点的隧道灯光干扰差异系数;根据隧道车辆监测局部特征区域中每个像素点的隧道灯光干扰差异系数获取隧道车辆监测干扰特征值;
6、根据隧道车辆监测干扰特征值获取隧道车辆监测灰度图像的隧道干扰滤波窗口系数;根据隧道干扰滤波窗口系数获取降噪后的隧道车辆监测灰度图像,基于降噪后的隧道车辆监测灰度图像和车辆标签信息实现隧道交通红绿灯管控。
7、优选的,所述根据隧道车辆监测灰度图像获取隧道车辆监测局部特征区域,基于隧道车辆监测局部特征区域确定每个像素点的近邻特征矩阵的方法为:
8、利用聚类算法获取隧道车辆监测灰度图像中所有像素点的聚类结果,将隧道车辆监测灰度图像所有像素点的聚类结果中每个聚类簇中像素点组成的区域作为一个隧道车辆监测局部特征区域;
9、以隧道车辆监测局部特征区域内每个像素点为中心构建预设参数大小的近邻特征矩阵,将每个像素点的近邻特征矩阵中所有元素在隧道车辆监测局部特征区域中对应的像素点作为每个像素点的近邻特征像素点。
10、优选的,所述根据隧道车辆监测局部特征区域中每个像素点的近邻特征矩阵获取每个像素点的车辆监测局部线性特征对的方法为:
11、对于隧道车辆监测局部特征区域中每个像素点,将像素点的近邻特征矩阵和近邻特征矩阵的转置矩阵分别作为输入,采用方差扩大因子算法分别获取近邻特征矩阵和近邻特征矩阵的转置矩阵的方差扩大因子,将所述方差扩大因子组成的共生对作为每个像素点的车辆监测局部线性特征对。
12、优选的,所述根据隧道车辆监测局部特征区域中每个像素点的车辆监测局部线性特征对计算每个像素点的隧道灯光干扰差异系数的方法为:
13、对于隧道车辆监测局部特征区域中每个像素点,将像素点的近邻特征矩阵与像素点的每个近邻特征像素点的近邻特征矩阵的相似度的度量结果作为分子,将像素点与像素点的每个近邻特征像素点的车辆监测局部线性特征对的点积比与0.01的和作为分母,计算分子与分母的比值在像素点的所有近邻特征像素点上累加结果的均值,将所述均值与像素点的近邻特征矩阵中所有元素的变异系数的乘积作为像素点的隧道灯光干扰差异系数。
14、优选的,所述根据隧道车辆监测局部特征区域中每个像素点的隧道灯光干扰差异系数获取隧道车辆监测干扰特征值的方法为:
15、对每个隧道车辆监测局部特征区域内所有像素点的隧道灯光干扰差异系数进行分类,计算每组分类数据对应的隧道检测干扰分布特征值;
16、对于隧道车辆监测局部特征区域内任意两组分类数据,将其中一组分类数据作为第一分类数据,将另一组分类数据作为第二分类数据,将第一分类数据中数据的数量与第一组分类数据中所有数据的均值的乘积作为第一对比数据,将第二分类数据中数据的数量与第二组分类数据中所有数据的均值的乘积作为第二对比数据,将第一对比数据与第二对比数据之差的绝对值作为分子,获取隧道车辆监测局部特征区域内每组分类数据中数据的数量,将所有所述数量中的最大值作为分母,将分子与分母的比值作为任意两组分类数据之间的隧道车辆特征弱化对比系数;
17、对于隧道车辆监测灰度图像中每个隧道车辆监测局部特征区域,将隧道车辆监测局部特征区域内任意两组分类数据之间的隧道车辆特征弱化对比系数作为分子,将隧道车辆监测局部特征区域内任意两组分类数据的隧道检测干扰分布特征值之差的绝对值与0.01的和作为分母,将分子与分母的比值在隧道车辆监测局部特征区域上累加结果的均值作为隧道车辆监测局部特征区域的隧道车辆监测干扰特征值。
18、优选的,所述对每个隧道车辆监测局部特征区域内所有像素点的隧道灯光干扰差异系数进行分类,计算每组分类数据对应的隧道检测干扰分布特征值的方法为:
19、将隧道车辆监测局部特征区域所有像素点的隧道灯光干扰差异系数作为输入,利用聚类获取所有像素点的隧道灯光干扰差异系数的分类结果,将隧道车辆监测局部特征区域中水平方向上最左侧的像素点作为起始点做水平向右的射线;
20、对于隧道车辆监测局部特征区域所有像素点的隧道灯光干扰差异系数的每组分类数据,将每组分类数据中所有元素对应的像素点在垂直方向上映射到所述射线上,将映射后所有的数据点拟合得到的直线的长度作为每组分类数据的隧道监测干扰分布特征值。
21、优选的,所述根据隧道车辆监测干扰特征值获取隧道车辆监测灰度图像的隧道干扰滤波窗口系数的具体方法为:
22、
23、式中,表示隧道车辆监测灰度图像的隧道干扰滤波窗口系数;表示隧道车辆监测灰度图像中第个隧道检测局部特征区域的隧道车辆监测干扰特征值;表示隧道车辆监测灰度图像中第个隧道检测局部特征区域中像素点的数量;和为常数系数;表示隧道车辆监测灰度图像中像素点的数量,表示隧道车辆监测灰度图像中所有隧道检测局部特征区域的隧道车辆监测干扰特征值的和;表示隧道车辆监测灰度图像中隧道检测局部特征区域的数量;表示向上取整函数。
24、优选的,所述根据隧道干扰滤波窗口系数获取降噪后的隧道车辆监测灰度图像,基于降噪后的隧道车辆监测灰度图像和车辆标签信息实现隧道交通红绿灯管控的方法为:
25、将隧道车辆监测灰度图像和对应的隧道干扰滤波窗口系数作为输入,采用bm3d图像去噪算法获取隧道车辆监测灰度图像降噪后的结果图像,其中隧道干扰滤波窗口参数作为bm3d图像去噪算法中划分图像块的大小的参数,将所述结果图像作为降噪后的隧道车辆监测灰度图像;
26、将降噪后的隧道车辆监测图像送到系统管理平台进行图像信号处理,得到隧道车辆目标的清晰图像;通过rfid基站感应器感应车辆标签,绑定车辆信息;同时通过车牌识别系统,将车辆运行数据传输到系统管理平台,通过系统管理平台进行红绿灯管控的步骤包括:
27、s1、将隧道内监测到的每个车辆的所处位置作为节点,将每个车辆与前一车辆之间的车距作为段,构建隧道施工交通链;
28、s2、根据隧道施工段中任一车辆与其前一路口间的路段间距以及车辆数量和预设的最小行车间距设定隧道对应的车辆数量阈值;
29、s3、通过视频检测组件获取隧道施工段内车辆车灯的光强数据,并根据所述光强数据对隧道的车辆数量阈值进行补偿,以得到隧道施工段对应的基准交通链;
30、s4、计算隧道施工段内的车辆数量与基准交通链的车辆数量阈值之间的差值,并根据所述差值确定隧道内是否发生拥堵,根据拥堵情况的判别结果控制红绿灯实现对隧道施工交通运行的实时管控;
31、s5、在隧道正洞和斜井内各个施工点安装语音声光报警器,如监测到同一车辆在行驶过程中经过2个或多个测速点时,连续出现超速情况,则触发语音广播及声光提醒,提醒施工面的人员紧急躲避。
32、第二方面,本技术实施例还提供了一种计算机设备,所述计算机设备包括存储器、处理器以及存储在所述存储器中并在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现上述任意一项方法的步骤。
33、本技术的有益效果是:通过隧道施工车辆通行及交通红绿灯管控方法对进入隧道的工程车辆进行指引管控,减少了车辆空跑,节省了资源、时间成本,管控简便,功能完善;通过平台智能化技术应用,车辆测速仪、车辆基站与红绿灯联动,减少了人工干预;在隧道封闭后或在隧道中放炮前,可在后台统一设置红绿灯颜色,禁止车辆和人员进入隧道,有效提升了车辆调度通行效率和事故应急处置效率;其中在监测过程中针对隧道内拍摄车辆图像中存在的隧道灯光、车辆灯光造成的干扰问题,通过分析隧道内采集的图像中灯光对图像中车辆信息的纹理弱化的局部影像特征调节利用bm3d图像去噪算法获取高质量图像过程中的图像块划分的参数,基于局部纹理弱化细节特征调整图像块划分的参数,其有益效果在于考虑隧道内灯光变化的不稳定特征,自适应调整图像去噪处理参数,提高利用采集的隧道内的车辆图像对隧道交通红绿灯管控的准确性。
- 还没有人留言评论。精彩留言会获得点赞!