一种buck电路的控制方法、系统、设备及存储介质与流程
本发明涉及电路控制,特别是涉及一种buck电路的控制方法、系统、设备及存储介质。
背景技术:
1、在当今这个数据为第五生产要素的大数据时代,统一存储阵列在数据的采集、存储乃至分析方面发挥着至关重要的作用。因此为了保证数据安全与完整,提高存储服务器的可靠性是必不可少的。而统一存储阵列上的电源性能直接关系着服务器的可靠性,因此需要提高电源对于负载的响应速度,减少电压的波动。
2、目前的统一存储阵列中,电源电路中大多采用的是同步整流buck电路,可以通过对内部mosfet(metal-oxide-semiconductor field-effect transistor,金属-氧化物-半导体场效应晶体管)的开通或关断进行控制,实现稳定的电压输出。可以看出,为了实现输出电压的稳定,对于buck电路内部的mosfet的反馈控制是非常重要的。目前的同步整流buck电路中,常用的反馈控制方法是将输出电压和参考电压进行比较形成误差信号,误差信号经过脉宽调制并进行电流放大后,就可以产生驱动控制信号,从而控制开关管的通断。很多芯片厂商利用此反馈控制方法推出了集成化程度很高的buck芯片,但是,由于内部拓扑固化以及反馈控制方法本身的限制,导致闭环调节时会产生低频纹波,以及负载变化时会影响电源响应速度。
3、综上所述,如何有效地进行buck电路的控制,提高电压输出的稳定性,是目前本领域技术人员急需解决的技术问题。
技术实现思路
1、本发明的目的是提供一种buck电路的控制方法、系统、设备及存储介质,以有效地进行buck电路的控制,提高电压输出的稳定性。
2、为解决上述技术问题,本发明提供如下技术方案:
3、一种buck电路的控制方法,包括:
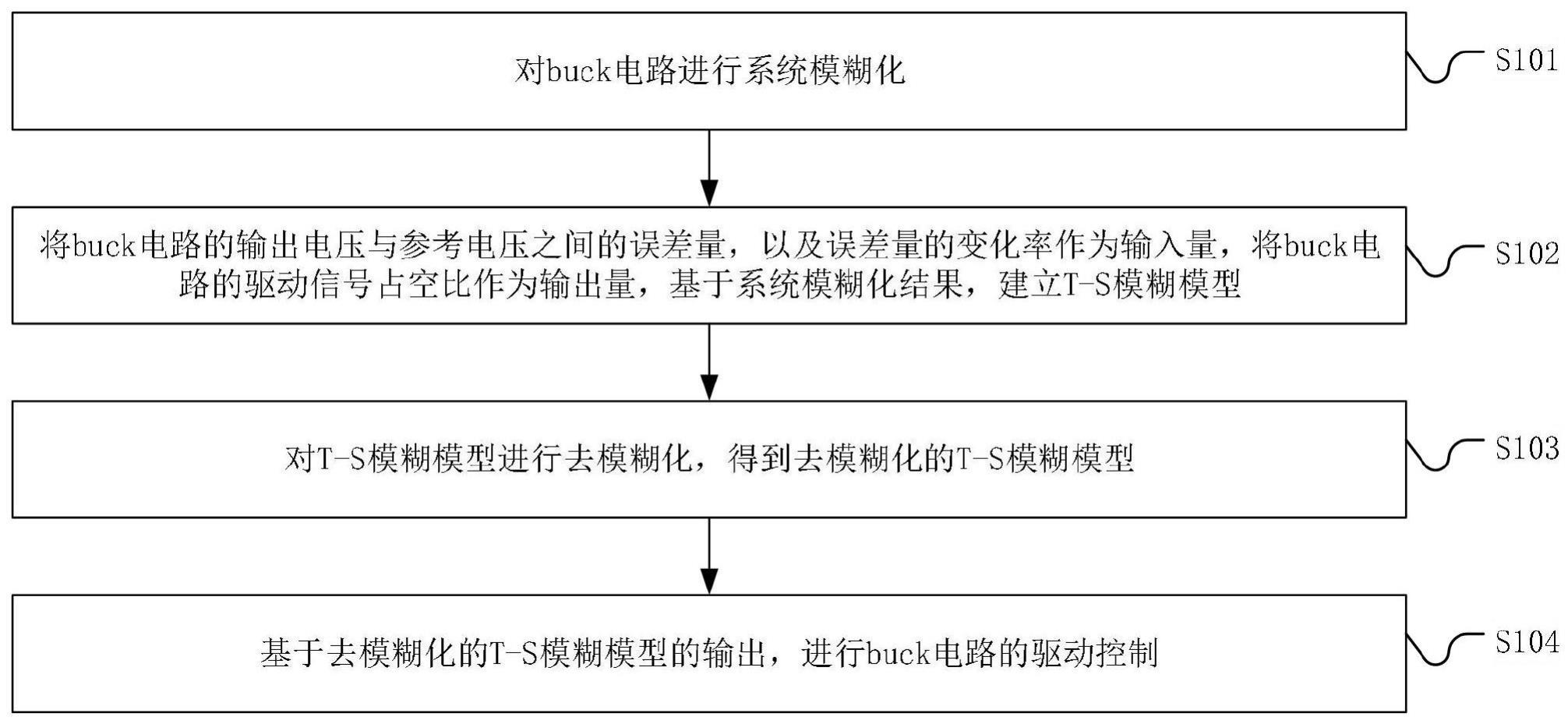
4、对buck电路进行系统模糊化;
5、将所述buck电路的输出电压与参考电压之间的误差量,以及所述误差量的变化率作为输入量,将所述buck电路的驱动信号占空比作为输出量,基于系统模糊化结果,建立t-s模糊模型;
6、对所述t-s模糊模型进行去模糊化,得到去模糊化的t-s模糊模型;
7、基于去模糊化的t-s模糊模型的输出,进行buck电路的驱动控制。
8、优选的,建立的t-s模糊模型表示为:
9、
10、其中,m表示的是模糊集,mi1至mip表示的是模糊集m中的第i条规则下的第1至第p范围,z1(t)至zp(t)表示的是第1至第p前提变量,t为时间,z1(t)is mi1表示z1(t)符合mi1的范围,and表示逻辑上的与,ai,bi以及ci均为第i条规则下的系数矩阵,y(t)为输出向量,x(t)为状态向量,u(t)为输入向量,i和p均为正整数,且1≤i≤r,r为t-s模糊模型的规则总数量。
11、优选的,得到的去模糊化的t-s模糊模型表示为:
12、
13、其中,z(t)表示的是包括z1(t)至zp(t)的向量,j为正整数,hi和wi均为中间变量。
14、优选的,还包括:
15、当检测出所述buck电路的输出电压高于高压阈值的持续时长达到第一时长时,输出过压提示信息并关闭所述buck电路;
16、当检测出所述buck电路的输出电压低于低压阈值的持续时长达到第二时长时,输出欠压提示信息并关闭所述buck电路。
17、优选的,还包括:
18、对建立的t-s模糊模型进行并行分布补偿;
19、相应的,对所述t-s模糊模型进行去模糊化,得到去模糊化的t-s模糊模型,包括:
20、对进行补偿之后的t-s模糊模型进行去模糊化,得到去模糊化的t-s模糊模型。
21、优选的,所述对建立的t-s模糊模型进行并行分布补偿,包括:
22、通过补偿规则对建立的t-s模糊模型进行并行分布补偿;
23、其中,m表示的是模糊集,mi1至mip表示的是模糊集m中的第i条规则下的第1至第p范围,z1(t)至zp(t)表示的是第1至第p前提变量,t为时间,z1(t)is mi1表示z1(t)符合mi1的范围,and表示逻辑上的与,x(t)为状态向量,u(t)为输入向量,i和p均为正整数,且1≤i≤r,r为t-s模糊模型的规则总数量;fi为第i规则下的反馈增益矩阵。
24、优选的,对进行补偿之后的t-s模糊模型进行去模糊化之后,得到的去模糊化的t-s模糊模型表示为:
25、
26、其中,z(t)表示的是包括z1(t)至zp(t)的向量,j为正整数,hi和wi均为中间变量,ai,bi以及ci均为第i条规则下的系数矩阵,y(t)为输出向量。
27、一种buck电路的控制系统,包括:
28、系统模糊化模块,用于对buck电路进行系统模糊化;
29、模糊模型建立模块,用于将所述buck电路的输出电压与参考电压之间的误差量,以及所述误差量的变化率作为输入量,将所述buck电路的驱动信号占空比作为输出量,基于系统模糊化结果,建立t-s模糊模型;
30、去模糊化模块,用于对所述t-s模糊模型进行去模糊化,得到去模糊化的t-s模糊模型;
31、执行模块,用于基于去模糊化的t-s模糊模型的输出,进行buck电路的驱动控制。
32、一种buck电路的控制设备,包括:
33、存储器,用于存储计算机程序;
34、处理器,用于执行所述计算机程序以实现如上述所述的buck电路的控制方法的步骤。
35、一种计算机可读存储介质,所述计算机可读存储介质上存储有计算机程序,所述计算机程序被处理器执行时实现如上述所述的buck电路的控制方法的步骤。
36、应用本发明实施例所提供的技术方案,包括:对buck电路进行系统模糊化;将buck电路的输出电压与参考电压之间的误差量,以及误差量的变化率作为输入量,将buck电路的驱动信号占空比作为输出量,基于系统模糊化结果,建立t-s模糊模型;对t-s模糊模型进行去模糊化,得到去模糊化的t-s模糊模型;基于去模糊化的t-s模糊模型的输出,进行buck电路的驱动控制。
37、具体的,本技术的方案中,是通过t-s模糊反馈控制的方式,进行buck电路的驱动控制。具体的,按照t-s模糊反馈控制算法的原理,首先可以对buck电路进行系统模糊化。本技术是将buck电路的输出电压与参考电压之间的误差量,以及误差量的变化率作为输入量,将buck电路的驱动信号占空比作为输出量,可以基于系统模糊化结果,建立出t-s模糊模型,然后对t-s模糊模型进行去模糊化,便可以得到去模糊化的t-s模糊模型。最后,基于去模糊化的t-s模糊模型的输出,可以直接进行buck电路的驱动控制。
38、t-s模糊反馈控制方法是通过设置规则来对局部线性系统进行描述,从而可以以任意精度逼近非线性系统,因此,本技术的方案通过t-s模糊反馈控制的方式,进行buck电路的驱动控制,可以提高buck电路对于对负载的瞬态响应,减小电压过冲,达到保持输出电压稳定以及良好的瞬态响应的目的。此外,相较于传统的控制方式,t-s模糊反馈控制方法实现简单,不需要复杂的数学模型、更易于实现。
39、综上所述,本技术的方案可以有效地进行buck电路的控制,提高电压输出的稳定性,实现良好的瞬态响应。
- 还没有人留言评论。精彩留言会获得点赞!