用于测量加热器基座上的基板的放置的方法和设备与流程
用于测量加热器基座上的基板的放置的方法和设备
1.相关申请的交叉引用
2.本申请要求2019年8月20日提交的美国非临时申请号16/545,824的优先权,该非临时申请要求2018年9月4日提交的美国临时申请号62/726,887的权益,其全部内容通过引用并入于此。
3.背景
4.实施例涉及半导体制造领域,并且具体地涉及用于使晶片在加热基座上居中的方法和设备。
5.相关技术的描述
6.在例如半导体晶片的基板的处理中,可放置基板于加热基座上以用于各种制造操作。典型地,加热基座包括基板安置于其上的平坦表面及环绕基板的环状环(也称为袋部)。环状环通常比正在被处理的基板厚。
7.理想上,基板应该与环状环居中,以便提供跨基板的均匀处理。即,基板的中心点应该与环状环的中心点重合。目前,基板与环状环的对准是通过眼睛进行的,这不能提供确保均匀处理所需的准确度。为了确认基板放置是合适的,可进行晶片上均匀性测试。这样的测试需要执行数小时且由于测试晶片的花费而成本高。
技术实现要素:
8.此处公开的实施例包含一种确定传感器晶片相对于基座的位置的方法。在实施例中,该方法包括以下步骤:放置传感器晶片至该基座上,其中该传感器晶片包括由该基座支撑的第一表面、与该第一表面相对的第二表面、及将该第一表面连接至该第二表面的边缘表面,其中在该边缘表面上形成多个传感器区域,且其中该基座包括主要表面及环绕该传感器晶片的环状壁。在实施例中,该方法进一步包括以下步骤:确定该多个传感器区域的每一者及该环状壁之间的间隙距离。在实施例中,该方法可进一步包括以下步骤:从间隙距离确定传感器晶片的中心点相对于该环状壁的中心点的中心点偏移。
9.此处公开的实施例包含一种放置控制器。在实施例中,放置控制器包括传感器接口,其中该传感器接口从传感器晶片接收传感器信息,该传感器晶片包括沿着该传感器晶片的边缘表面的多个面向外的传感器。在实施例中,放置控制器进一步包括中心点模块,其中该中心点模块使用该传感器信息以相对于加热基座的中心点确定该传感器晶片的中心点,该传感器晶片安置于该加热基座上,且其中该放置控制器控制定位机器人以将该传感器晶片放置于该基座上。
10.此处公开的实施例包括一种校准晶片定位机器人以用于将晶片放置到基座上的方法。在实施例中,该方法包括以下步骤:使用该晶片定位机器人将传感器晶片放置于该基座上的第一位置中,其中该传感器晶片包括由该基座支撑的第一表面、与该第一表面相对的第二表面、及将该第一表面连接至该第二表面的边缘表面,其中在该边缘表面上形成多个传感器区域,且其中该基座包括主要表面及环绕该传感器晶片的环状壁。在实施例中,该方法进一步包括以下步骤:确定该多个传感器区域的每一者及该环状壁之间的间隙距离。
在实施例中,该方法进一步包括以下步骤:从间隙距离确定该传感器晶片的中心点相对于该环状壁的中心点的中心点偏移。在实施例中,该方法进一步包括以下步骤:通过以该中心点偏移修改该第一位置来产生第二位置。在实施例中,该方法进一步包括以下步骤:使用该晶片定位机器人从该基座移除该传感器晶片。在实施例中,该方法进一步包括以下步骤:使用该晶片定位机器人将晶片放置于该基座上的该第二位置中。
附图说明
11.图1a是根据实施例的加热基座上的传感器晶片的平面图。
12.图1b是根据实施例的图1a中的传感器晶片和加热基座的截面图。
13.图2是根据实施例的具有边缘传感器的传感器晶片的平面图。
14.图3是根据实施例的具有边缘传感器的传感器晶片的透视图。
15.图4a是根据实施例的具有边缘传感器的传感器晶片的部分截面图。
16.图4b是根据实施例的具有边缘传感器和电场防护件的传感器晶片的部分截面图。
17.图4c是根据实施例的具有边缘传感器和顶部表面凹部的传感器晶片的部分截面图。
18.图5是根据实施例的用于确定传感器晶片相对于基座的偏移的处理工具和放置控制器的示意图。
19.图6是根据实施例的用于确定传感器晶片相对于基座的偏移的过程的流程图。
20.图7是根据实施例的用于使用传感器晶片校准晶片定位机器人的过程的流程图。
21.图8根据实施例示出示例性计算机系统的框图,可将该计算机系统与包含确定传感器晶片相对于基座的偏移的过程结合使用。
具体实施方式
22.根据各种实施例,描述了包含具有边缘传感器的传感器晶片的系统和使用这种传感器晶片以测量传感器晶片相对于基座的偏移的方法。在以下描述中,提出了许多特定细节以便提供对实施例的透彻理解。对于发明所属领域技术人员显而易见的是,可在没有这些特定细节的情况下实现实施例。在其他情况下,没有详细描述众所周知的方面,以免不必要地模糊实施例。此外,应理解,附图中所展示的各种实施例是图示性的表示,而不一定按比例绘制。
23.如上所述,目前通过眼睛来确认晶片在加热器基座上的对准。只在经过多次测试后处理晶片才能确认处理套件是否相对于基座的环状环正确居中。该过程需要数小时的针对处理工具的停机时间且是昂贵的。
24.据此,本文所公开的实施例包含传感器晶片,能够直接测量传感器晶片相对于基座的偏移。因此,单一测试程序可以被实施来确认传感器晶片在所需容忍度之内居中。如果发现传感器晶片放置在所需容忍度之外,则可将用来将传感器晶片放置于基座上的定位机器人设置为具有偏移,该偏移允许后续放置的晶片正确对准而无需大量测试。因此,本文所公开的实施例提供了减低的处理工具的停机时间并改善了由处理工具所实行的处理的均匀性,因为可改善晶片的居中准确度。
25.现在参考图1a,展示了根据实施例的支撑于基座100上的传感器晶片110的平面
图。在实施例中,基座100可以是放置晶片于上以供处理的任何表面。例如,基座100可以是加热基座。在实施例中,基座100可包括主要表面151和环状环152,晶片放置在主要表面151上,环状环152环绕晶片。
26.在实施例中,传感器晶片110可包括多个面向外的传感器,多个面向外的传感器被用来确定传感器晶片110相对于基座100的偏移。如图1a所展示,传感器晶片110的直径可小于环状环152的内直径。在实施例中,传感器晶片110可具有与生产晶片实质相同的尺寸。例如,传感器晶片110可具有标准晶片直径(例如,300mm等)的直径。据此,传感器晶片110可能与环状环152未对准。例如,传感器晶片110的中心点114可能不与环状环152的中心点154重合。
27.现在参考图1b,展示了基座100和传感器晶片110的截面图,以便更清楚地图示传感器晶片110的未对准。如图所示,传感器晶片110的第一(即,底部)表面113安置于基座100的主要表面151上。环状环152围绕传感器晶片110,使得环状环的内表面153面向传感器晶片110的边缘表面112。在实施例中,内表面153的高度可大于传感器晶片110的厚度。即,传感器晶片110的第二(即,顶部)表面111可在环状环152的顶部表面下方。
28.如图1b中所展示,环状环152的内表面153通过第一间隙g1和第二间隙g2与传感器晶片的边缘表面112间隔开。当第一间隙g1和第二间隙g2不相等时,传感器晶片110未对准。例如,传感器晶片110的中心点114从环状环152的中心点154偏移了距离d。
29.在实施例中,可通过在多个位置中测量传感器晶片110的边缘112与环状环152的内表面153之间的间隙g来确定偏移距离d。在特定的实施例中,使用在传感器晶片110的边缘上形成的多个传感器区域来测量间隙g。图2至4c提供了根据各种实施例的具有边缘传感器区域的传感器晶片110的示例性图示。
30.现在参考图2,展示了根据实施例的具有多个边缘传感器区域2351至235
n
的传感器晶片210的平面图。在实施例中,边缘传感器区域235绕着传感器晶片210的周边分布。每一传感器区域235包括一个或更多个传感器,一个或更多个传感器被用来测量传感器晶片210的边缘和围绕传感器晶片210的基座的环状环之间的间隙。边缘传感器区域235中的一个或更多个传感器可以是电容性传感器。在特定的实施例中,边缘传感器区域235可包括自参照的电容性传感器。
31.在所图示的实施例中,展示了以90度间隔放置的四个边缘传感器区域235。然而,应理解,可使用三个或更多个边缘传感器区域235来测量处理套件的中心相对于传感器晶片210的中心的偏移。发明所属领域技术人员将认识到:提供更多的边缘传感器区域235将提供更准确的测量。在实施例中,传感器晶片210也可包括凹口216。凹口216相对于传感器区域235的位置可被传感器晶片210知晓。据此,也可确定传感器晶片210的旋转定向。
32.在实施例中,每一边缘传感器区域235可使用迹线237通讯地耦合至传感器晶片210上的计算模块238。在实施例中,计算模块238可包括电源232中的一个或更多个(例如,电池)、处理器/存储器234(例如,用于实施和/或存储使用边缘传感器区域235进行测量的电路、存储器等)、及无线通信模块233(例如,蓝牙、wifi等)。在实施例中,计算模块238可嵌入于传感器晶片210中。另外,虽然展示为位于传感器晶片210的中心,应理解,计算模块238可位于传感器晶片210中的任何方便的位置处。
33.现在参考图3,展示了根据实施例突显示例性边缘传感器区域335的细节的传感器
晶片310的透视图。在实施例中,传感器晶片310可包括第一表面313(例如,底部表面)、第二表面311(例如,顶部表面)、及将第一表面313连接至第二表面311的边缘表面312。在实施例中,可形成凹口316进入传感器晶片310。
34.在实施例中,可沿着将第一表面313连接至第二表面311的边缘表面312形成边缘传感器区域335。在特定的实施例中,每一边缘传感器区域315可包括探测器341。探测器341(即,每一边缘传感器区域中的探测器)可以是自参照的电容性探测器。即,在第一边缘传感器区域335中供应至第一探测器341的电流的输出相位可与在相邻的第二边缘传感器区域335中供应至第二探测器341的电流的输出相位偏移180度。因此,可在基座不需要接地的情况下进行从边缘表面312至环状环(未示出)的内表面的距离测量。在所图标的实施例中,边缘传感器区域335被示为具有单一探测器。然而,在一些实施例中,每一边缘传感器区域335可包括多于一个的探测器341。虽然本文特别参考自参照的电容性传感器,应理解,本文所公开的实施例包含任何合适的传感器技术(例如,激光传感器、光学传感器等)。
35.现在参考图4a至4c,展示了根据各种实施例的传感器晶片410的示例性部分截面图。在图4a中,部分截面图描绘了传感器区域435与边缘表面412基本上共平面。在实施例中,传感器区域435从边缘表面412发射电场449,使得传感器可测量在边缘表面412和处理套件的表面之间的间隙。
36.现在参考图4b,示出了根据实施例的具有电场防护件447的传感器晶片410的部分横截面图示。在实施例中,电场防护件447可以是在传感器晶片410的底部表面413和边缘传感器区域435之间形成的导电层。可通过电场防护件447来修改边缘传感器区域435的电场449。特定地,电场防护件447可修改边缘传感器区域435的电场449,使得电场从边缘表面412朝向环状环的内表面侧向延伸向外。据此,电场防护件447防止边缘传感器区域435中的传感器检测到基座的其上支撑传感器晶片410的主要表面,且消除了错误的读数。
37.现在参考图4c,示出了根据实施例的具有顶部表面凹部448的传感器晶片410的部分截面图。在实施例中,可形成顶部表面凹部448进入紧邻传感器区域435的第二表面411。可制成顶部表面凹部448以防止传感器区域435的传感器感测到顶部表面411且提供错误的读数。在实施例中,顶部表面凹部448可向后延伸距离r。例如,距离r可大约等于边缘感测区域435的最大感测距离。例如,r可以是大约5mm或更小。
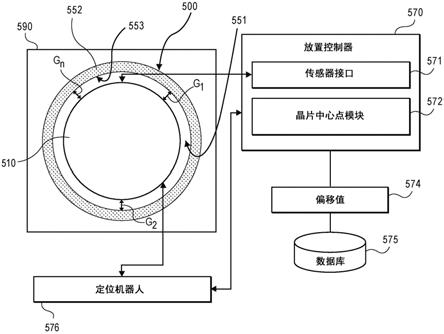
38.现在参考图5,示出了根据实施例的处理工具590的示意性框图,处理工具590具有用于实施用于测量传感器晶片在基座上的偏移的过程的放置控制器570。在实施例中,基座500可位于处理工具590中。基座可包括支撑晶片于上的主要表面551和环绕晶片的环状环552。
39.在实施例中,放置控制器570可提供指令至定位机器人576以将传感器晶片510放置于基座500的主要表面551上。传感器晶片510可以是相似于上述传感器晶片的传感器晶片。例如,传感器晶片510可包括多个边缘传感器区域,用于测量传感器晶片510的边缘和环状圈552的内表面553之间的间隙g1至g
n
。
40.在实施例中,可通过放置控制器570的传感器接口571获得来自传感器晶片510的传感器信息。例如,传感器接口571可从传感器晶片510接收传感器信息(例如,使用无线通信模块无线地接收)。放置控制器570可使用晶片中心点模块572中的传感器信息(例如,间隙g1至g
n
)来相对于环状环552的中心点确定传感器晶片510的中心点。放置控制器570可使
用来自晶片中心点模块572的结果来产生输送至数据库575的偏移值574。在实施例中,当总偏移值574超过预定临界值时,可由放置控制器570使用偏移值574以修改定位机器人将基板放置于基座500上的位置。在实施例中,临界值可以是+/-200微米的偏移。
41.现在参考图6,示出了根据实施例的用于确定传感器晶片相对于基座的环状环的中心点的中心点偏移的过程680的过程流程图。
42.在实施例中,过程680开始于操作681(例如,由定位机器人576执行),操作681包括将具有多个边缘传感器区域的传感器晶片放置于基座上。传感器晶片可以是根据本文所公开的实施例描述的任何传感器晶片。在实施例中,传感器晶片可放置于支撑表面上,定位机器人由放置控制器控制,相似于关于图5描述的实施例。
43.在实施例中,过程680可继续操作682(例如,由放置控制器570的传感器接口571执行),操作682包括使用多个边缘传感器区域的每一者确定传感器晶片的边缘与基座的环状环的内表面之间的间隙距离。例如,边缘传感器区域可包括自参照的电容性传感器。边缘传感器区域可在边缘传感器区域下方具有电场防护件以修改电容性传感器的电场,以便防止电容性传感器读取支撑传感器晶片于上的主要表面。额外的实施例可包含接近边缘传感器区域的顶部表面凹部,以消除传感器晶片的顶部表面的错误测量。
44.在实施例中,过程680可继续操作683(例如,由放置控制器570的晶片中心点模块572执行),操作683包括使用与多个边缘传感器区域的间隙距离来确定传感器晶片相对于环状环的中心点的中心点偏移。在实施例中,中心点偏移可由放置控制器确定并存储于数据库中。
45.现在参考图7,示出了根据实施例的用于使用传感器晶片校准晶片定位机器人的过程780的过程流程图。
46.在实施例中,过程780可开始于操作781(例如,由定位机器人576执行),操作781包括使用晶片定位机器人将传感器晶片放置在基座表面上的第一位置中。在实施例中,传感器晶片可以是具有面向外的传感器的任何传感器晶片,例如本文所述的传感器晶片。在实施例中,基座可包括传感器晶片安置于上的主要表面和绕着传感器晶片的环状环。
47.在实施例中,过程780可继续操作782(例如,由放置控制器570的传感器接口571执行),操作782包括使用多个边缘传感器区域确定传感器晶片与基座的环状环的内表面之间的多个间隙距离。例如,传感器晶片的边缘传感器区域可包括自参照的电容性传感器。边缘传感器区域可在边缘传感器区域下方具有电场防护件以修改电容性传感器的电场,以便防止电容性传感器读取支撑传感器晶片于上的主要表面。额外的实施例可包含接近边缘传感器区域的顶部表面凹部,以消除传感器晶片的顶部表面的错误测量。
48.在实施例中,过程780可继续操作783(例如,由放置控制器570的晶片中心点模块572执行),操作783包括使用与多个边缘传感器区域的间隙距离来确定传感器晶片相对于环状环的中心点的中心点偏移。
49.在实施例中,过程780可继续操作784(例如,由放置控制器570执行),操作784包括通过以中心点偏移(例如,偏移值574)修改第一位置来产生第二位置。在实施例中,可实施操作784以减低后续放置至基座上的晶片的中心点偏移。在一些实施例中,当中心点偏移超过预定临界值时,产生第二位置。例如,如果中心点偏移小于200微米,则可能不需要进一步校准晶片定位机器人。在实施例中,偏移值574可存储于数据库575中以供未来使用。
50.在实施例中,过程780可继续操作785(例如,由定位机器人576执行),操作785包括使用晶片定位机器人从基座移除传感器晶片。
51.在实施例中,过程780可接着继续操作786(例如,由定位机器人576执行),操作786包括使用晶片定位机器人将晶片放置在基座上的第二位置中。在实施例中,晶片可以是生产晶片(即,在其上制造装置的晶片)。由于已经校准了晶片定位机器人,可假设晶片在第二位置的最终放置具有高准确度。例如,可以+/-200微米的准确度放置后续放置的装置晶片。
52.现在参考图8,图示了根据实施例的处理工具的示例性计算机系统860的框图。在实施例中,计算机系统860可使用作为放置控制器。在实施例中,计算机系统860耦合至且控制处理工具中的处理。计算机系统860可连接(例如,网络连接)至网络861(例如,局域网络(lan)、内部网络路、外联网络或因特网)中的其他机器。计算机系统860可在客户端-服务器网络环境中以服务器或客户端机器的能力操作,或作为点对点(或分布式)网络环境中的同级机器操作。计算机系统860可以是个人计算机(pc)、平板计算机、机顶盒(stb)、个人数字助理(pda)、行动式电话、网络应用设备、服务器、网络路由器、交换器或桥、或任何能够执行指令集(依序或其他)的机器以指定该机器要采取的动作。此外,虽然仅针对计算机系统860图示了单一机器,术语“机器”也应被视为包含个别地或联合地执行一指令集(或多个指令集)的任何机器的集合(例如,计算机),以执行本文描述的任何一个或更多个方法。
53.计算机系统860可包含计算机程序产品或软件822,具有存储于上的指令的非瞬时机器可读取介质,可使用以对计算机系统860(或其他电子装置)进行编程以执行根据实施例的处理。机器可读取介质包含用于以机器(例如,计算机)可读取的形式存储或传送信息的任何机制。例如,机器可读取(例如,计算机可读取)介质包含机器(例如,计算机)可读取存储介质(例如,只读存储器(“rom”)、随机存取存储器(“ram”)、磁盘存储介质、光学存储介质、闪存装置等)、机器(例如,计算机)可读取传输介质(电、光、声或其他形式的传播信号(例如,红外光信号、数字信号等))等。
54.在实施例中,计算机系统860包含系统处理器802、主存储器804(例如,只读存储器(rom)、高速缓存、例如同步dram(sdram)或rambus dram(rdram)的动态随机存取存储器(dram)等、静态存储器806(例如,高速缓存、静态随机存取存储器(sram)等)和次级存储器818(例如,数据存储装置),彼此经由总线830通讯。
55.系统处理器802表示一个或更多个通用处理装置,例如微系统处理器、中央处理单元等。更特定地,系统处理器可以是复杂指令集计算(cisc)微系统处理器、精简指令集计算(risc)微系统处理器、超长指令字(vliw)微系统处理器、实行其他指令集的系统处理器、或实行指令集的组合的系统处理器。系统处理器802也可以是一个或更多个专用处理装置,例如特定应用集成电路(asic)、现场可编程门阵列(fpga)、数字信号系统处理器(dsp)、网络系统处理器等。系统处理器802经配置以执行处理逻辑826以用于执行本文描述的操作。
56.计算机系统860可进一步包含用于与其他装置或机器通讯的系统网络接口装置808。计算机系统860也可包含视频显示单元810(例如,液晶显示器(lcd)、发光二极管显示器(led)、或阴极射线管(crt))、字母数字输入设备812(例如,键盘)、光标控制装置814(例如,鼠标)和信号产生装置816(例如,扬声器)。
57.次级存储器818可包含机器可访问存储介质831(或更特定地,计算机可读取存储介质),其上存储了一个或更多个指令集(例如,软件822),该等指令集施行本文描述的任何
一个或更多个方法或功能。软件822也可在由计算机系统860执行期间完全或至少部分地驻留在主存储器804内和/或系统处理器802内,主存储器804和系统处理器802也构成机器可读取存储介质。可进一步经由系统网络接口装置808在网络861上传送或接收软件822。
58.虽然在示例性实施例中将机器可访问存储介质831展示为单一介质,术语“机器可读取存储介质”应当被视为包含单一介质或存储一个或更多个指令集的多个介质(例如,集中式或分布式数据库和/或相关联的快取及服务器)。术语“机器可读取存储介质”也应被视为包含能够存储或编码指令集以供机器执行并且使机器执行任何一个或更多个方法的任何介质。据此,术语“机器可读取存储介质”应被视为包含但不限于固态存储器,及光学和磁性介质。
59.在前述说明书中,已描述特定示例性实施例。显而易见的是,在不背离以下权利要求的范围的情况下,可对其进行各种修改。据此,本说明书及附图被视为说明性意义而非限制性意义。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1