用于检查的装置、方法及记录命令的记录介质与流程
1.本公开涉及一种用于检查的技术。
背景技术:
2.在半导体的制造工艺中,进行各种检查以确认是否适当地执行了针对半导体的各种处理、工艺等。例如,可以执行关于设置在半导体基板上的晶粒(die)等元件是否位于在半导体基板上应放置的位置等的检查。
3.尤其是,对于安装在半导体基板上的晶粒,可以执行检查以确认安装的晶粒和基板之间是否存在倾斜(tilt)。通常,在基板上涂布有焊料或焊料球的状态下,可以将晶粒安装在焊料或焊料球上部。此时,晶粒的下面应以与半导体基板的基准面平行的方式安装,但也可以因为规定的要素(例如,焊料或焊料球的涂布状态),晶粒以对于半导体基板倾斜一定角度的形态安装。由于这是有可能导致半导体装置的不良的因素,因此在检查半导体的过程中,应能够确认晶粒是否倾斜,若倾斜则要确认倾斜多少角度以上。
4.为了执行针对这种倾斜的检查,可以采用对半导体晶粒照射三维照明的三维检查器。但是以这种方式难以获得作为检查对象的晶粒的三维形状。这是因为,通常,半导体晶粒的上面由反射体构成,照射的三维照明在半导体晶粒的上面可引起全反射,由此,对半导体晶粒的成像效果可能不佳。
5.另外,为了执行对上述倾斜的检查,可以使用采用了白光扫描干涉仪(white light scanning interferometry)的装备。然而,就这种方式而言,在半导体晶粒对于基准面倾斜特定角度(例:1.2度)以上的情况下,则存在未形成对该晶粒的像的问题。
6.另外,为了执行对上述倾斜的检查,可以采用二维方式的面积检查。拍摄倾斜的四角形的半导体晶粒时,根据倾斜程度看起来像是平行四边形模样,二维方式的面积检查是通过该平行四边形的形态导出倾斜程度的方式。然而,在半导体晶粒的上面以反射体形成的情况下,这种方式仍然是无法获得正确的平行四边形形态,因此存在无法正确预测对象体的倾斜程度的问题。
技术实现要素:
7.要解决的技术问题
8.本公开旨在解决现有技术的上述缺陷,提供一种用于检查的技术。
9.解决问题的手段
10.作为本公开的一侧面,可以提供一种用于检查的装置。根据本公开的一侧面的装置,包括:至少一个第一光源,所述至少一个第一光源向位于基准面上的对象体照射照明光;一个以上的摄像头,所述摄像头捕获(capture)所述照明光从所述对象体反射而生成的一个以上的照明图像;及一个以上的处理器,所述处理器,可以在所述一个以上的照明图像上确定表示所述对象体的边角(edge)的一个以上的轮廓线,基于所述一个以上的轮廓线确定所述对象体上面的边角相对于所述基准面具有的高度值,基于所述高度值确定所述对象
体上面与所述基准面之间的第一角度。
11.在一实施例,还包括:至少一个第二光源,所述至少一个第二光源向所述对象体照射图案光,所述一个以上的摄像头捕获所述图案光从所述对象体反射而生成的一个以上的图案图像,所述处理器,可以基于所述一个以上的照明图像及所述一个以上的图案图像确定表示所述对象体的边角的所述一个以上的轮廓线,基于所述一个以上的轮廓线确定与所述对象体的上面对应的虚拟平面,且将所述虚拟平面与所述基准面之间的第二角度确定为所述第一角度。
12.在一实施例,所述一个以上的摄像头可以包括:上方摄像头,所述上方摄像头从所述对象体的上方捕获照明图像或图案图像;及一个以上的侧方摄像头,所述一个以上的侧方摄像头从所述对象体的一个以上的侧方捕获照明图像或图案图像。
13.在一实施例,所述一个以上的照明图像及所述一个以上的图案图像中的一部分可以是由所述上方摄像头从所述对象体的上方捕获的上方图像,所述一个以上的照明图像及所述一个以上的图案图像中的另一部分可以是由所述一个以上的侧方摄像头从所述对象体的一个以上的侧方捕获的侧方图像。
14.在一实施例,所述处理器可以提取表示所述对象体的相同的一个边角的所述上方图像上的第一轮廓线及所述一个以上的侧方图像上的第二轮廓线,且可以基于所述第一轮廓线及所述第二轮廓线确定所述虚拟平面。
15.在一实施例,所述处理器可以确定指示所述第一轮廓线及第二轮廓线之间的对应关系的第一关系信息,且可以基于所述第一关系信息确定所述虚拟平面。
16.在一实施例,所述第一轮廓线上的第一点可以与所述第二轮廓线上的第二点对应,所述第一关系信息可以包括一对坐标信息,所述坐标信息是在所述上方图像上所述第一点具有的坐标信息及在所述一个以上的侧方图像上所述第二点具有的坐标信息。
17.在一实施例,所述处理器,可以在所述一个以上的侧方图像中,提取表示所述对象体的相同的一个边角的一个侧方图像上的第三轮廓线及另一个侧方图像上的第四轮廓线,确定指示所述第三轮廓线及所述第四轮廓线之间的对应关系的第二关系信息,且可以基于所述第一关系信息及所述第二关系信息,确定所述虚拟平面。
18.在一实施例,所述处理器,可以在所述一个以上的照明图像及所述一个以上的图案图像中,选择所述对象体表面的对比(contrast)值为预设值以上的图像而确定所述虚拟平面。
19.在一实施例,所述对象体可以具有多个层被堆叠的形态,所述一个以上的轮廓线可以指示所述多个层各个的边角,所述处理器,可以基于所述一个以上的轮廓线确定分别对应于所述多个层的多个虚拟平面,可以基于分别对应于所述多个层的多个虚拟平面确定所述多个层的各个之间的间隔。
20.作为本公开的一侧面,可以提供一种用于检查的方法。根据本公开的一侧面的方法,可以包括:至少一个第一光源向位于基准面上的对象体照射照明光的步骤;一个以上的摄像头捕获(capture)所述照明光从所述对象体反射而生成的一个以上的照明图像的步骤;一个以上的处理器在所述一个以上的照明图像上确定表示所述对象体的边角的一个以上的轮廓线的步骤;所述处理器基于所述一个以上的轮廓线确定所述对象体上面的边角相对于所述基准面具有的高度值的步骤;及所述处理器基于所述高度值确定所述对象体上面
与所述基准面之间的第一角度的步骤。
21.在一实施例的方法,还可以包括:至少一个第二光源向所述对象体照射图案光的步骤;所述一个以上的摄像头捕获所述图案光从所述对象体反射而生成的一个以上的图案图像的步骤;所述处理器基于所述一个以上的照明图像及所述一个以上的图案图像确定表示所述对象体的边角的所述一个以上的轮廓线的步骤;所述处理器基于所述一个以上的轮廓线确定与所述对象体上面对应的虚拟平面的步骤;及所述处理器将所述虚拟平面与所述基准面之间的第二角度确定为所述第一角度的步骤。
22.在一实施例,所述一个以上的摄像头可以包括:上方摄像头,所述上方摄像头从所述对象体的上方捕获照明图像或图案图像;及一个以上的侧方摄像头,所述一个以上的侧方摄像头从所述对象体的一个以上的侧方捕获照明图像或图案图像。
23.在一实施例,所述一个以上的照明图像及所述一个以上的图案图像中的一部分可以是由所述上方摄像头从所述对象体的上方捕获的上方图像,所述一个以上的照明图像及所述一个以上的图案图像中的另一部分可以是由所述一个以上的侧方摄像头从所述对象体的一个以上的侧方捕获的侧方图像。
24.在一实施例,确定所述虚拟平面的步骤可以包括:提取表示所述对象体的相同的一个边角的所述上方图像上的第一轮廓线及所述一个以上的侧方图像上的第二轮廓线的步骤;及基于所述第一轮廓线及所述第二轮廓线确定所述虚拟平面的步骤。
25.在一实施例,确定所述虚拟平面的步骤可以包括:确定指示所述第一轮廓线及第二轮廓线之间的对应关系的第一关系信息的步骤;及基于所述第一关系信息确定所述虚拟平面的步骤。
26.在一实施例,所述第一轮廓线上的第一点可以与所述第二轮廓线上的第二点对应,所述第一关系信息可以包括一对坐标信息,所述一对坐标信息是在所述上方图像上所述第一点具有的坐标信息及在所述一个以上的侧方图像上所述第二点具有的坐标信息。
27.在一实施例,确定所述虚拟平面的步骤还可以包括:在所述一个以上的侧方图像中,提取表示所述对象体的相同的一个边角的一个侧方图像上的第三轮廓线及另一个侧方图像上的第四轮廓线的步骤;确定指示所述第三轮廓线及所述第四轮廓线之间的对应关系的第二关系信息的步骤;及基于所述第一关系信息及所述第二关系信息确定所述虚拟平面的步骤。
28.在一实施例,确定所述虚拟平面的步骤可以包括:在所述一个以上的照明图像及所述一个以上的图案图像中,选择所述对象体表面的对比(contrast)值为预设值以上的图像而确定所述虚拟平面的步骤。
29.根据本公开的一侧面,可以提供一种记录有用于检查的命令的非暂时性计算机可读记录介质。根据本公开的一侧面的记录于记录介质的命令,作为用于在计算机上执行的命令,其由一个以上的处理器执行时,可以包括以使一个以上的处理器执行以下步骤的可执行命令:在向位于基准面上的对象体照射的照明光从所述对象体反射而生成的一个以上的照明图像上,确定表示所述对象体的边角的一个以上的轮廓线的步骤;基于所述一个以上的轮廓线确定所述对象体上面的边角相对于所述基准面所具有的高度值的步骤;及基于所述高度值确定所述对象体上面与所述基准面之间的第一角度的步骤。
30.发明的效果
31.根据本公开的多样实施例,在对象体的上面为反射体的情况下,也能够测量出该对象体的倾斜角度。
32.根据本公开的多样实施例,在对象体相对于基板的基准面倾斜特定角度(例:1.2度)以上的情况下,也能够导出其倾斜程度。
33.根据本公开的多样实施例,由基板的其他妨碍物而难以获得对象体的明确图像的情况下,也能够测量出该对象体的倾斜角度。
34.根据本公开的多样实施例,能够利用以多样角度及方向从多样类型的光源照射的光来获得图像,从而生成对于对象体的准确的虚拟三维模型。
附图说明
35.图1是示出根据本公开的装置运转的过程的图。
36.图2是示出根据本公开的一实施例的装置的框图的图。
37.图3是示出根据本公开的一实施例的生成相对于对象体上面的虚拟平面的过程的图。
38.图4是说明根据本公开的一实施例的用于获得多样图像及确定关系信息的图像组合的图。
39.图5是示出根据本公开的一实施例的一个以上的图案光源的配置形态的图。
40.图6是示出根据本公开的一实施例的一个以上的照明光源的配置形态的图。
41.图7是示出根据本公开的一实施例的图像的过滤过程的图。
42.图8是示出从根据本公开的一实施例的图像的一个轮廓线导出另一个轮廓线的过程的图。
43.图9是示出能够由根据本公开的装置执行的用于检查的方法的一实施例的图。
具体实施方式
44.本文中所记载的多样实施例是以明确说明本公开的技术思想为目的而示出,而不是将其限定为特定实施形态。本公开的技术思想包括本文中所记载的各个实施例的多样变更(modifications)、等同物(equivalents)、替代物(alternatives)及从各个实施例的全部或一部分选择性组合的实施例。另外,本公开的技术思想的权利要求范围不限于以下记载的多样实施例或关于实施例的具体说明。
45.包括技术性或科学性术语,本文中所使用的术语,只要未不同地定义,应具有本公开所属技术领域的普通技术人员一般理解的意义。
46.本文中使用的“包括”、“可以包括”、“具备”、“可以具备”、“具有”、“可以具有”等表述意味作为对象的特征(例:功能、动作或构成要素等)的存在,且不排除其他附加特征的存在。即,这些表述应理解为具有包括其他实施例的可能性的开放型术语(open
‑
ended terms)。
47.只要未不同地提及,本公开中所使用的单数型的表述可以包括复数型的意义,这也同样适用于权利要求书中记载的单数型的表述。
48.只要未不同地提及,本文中所使用的“第一”、“第二”或“第一”、“第二”等表述是为了在说明多个同类型对象时将一个对象与其他对象进行区分而使用,并不限定该对象之间
的顺序或重要程度。
49.本文中所使用的“a、b及c”、“a、b或c”、“a、b及/或c”或“a、b及c中的至少一个”、“a、b或c中的至少一个”、“a、b及/或c中的至少一个”等表述可以指各个罗列的项目或罗列的项目的所有可能的组合。例如,“a或b中的至少一个”可以指(1)至少一个a、(2)至少一个b、(3)至少一个a及至少一个b。
50.本文中使用的“基于~”字样的表述,用于记述对包含相应表述的语句或文章中记述的确定、判断的行为或动作施加影响的一个以上的因子,该表述不排除对相应确定、判断的行为或动作施加影响的追加因子。
51.本文中所使用的某构成要素(例:第一构成要素)与其他构成要素(例:第二构成要素)“连接”或“衔接”等表述不仅是意味着所述某构成要素与所述其他构成要素直接连接或衔接,还可以意味着以新的其他构成要素(例:第三构成要素)为媒介连接或衔接。
52.本文中所以使用的“构成为~(configured to)”的表述,根据文脉也可以具有“设置为~”、“具有~的能力”、“变更为~”、“制备为~”、“能够~”等含义。该表述不被限定为“在硬件上特别设计”的含义,例如,构成为执行特定动作的处理器,可以是意味着通过执行软件而能够执行特定动作的通用处理器(generic
‑
purpose processor)。
53.在本公开中,对象体可以意味着位于规定表面上且作为装置的检查对象的物体。在一实施例,对象体可以是位于半导体基板上的晶粒、半导体元件或芯片。对象体可以安装在半导体基板上。如上所述,对象体可以以对象体的下面与基板的基准面具有一定角度地倾斜的方式安装。
54.在本公开中,基板可以是对象体所在的规定表面。在一实施例,基板可以是半导体基板。基板的基准面可以是指基板的表面,可以是指作为测量与前述对象体的下面之间的倾斜角度的基准面。
55.以下,参照附图,详细说明本公开的多样的实施例。在附图及关于附图的说明中,对于相同或实质上相同(substantially equivalent)的构成要素可以赋予相同的附图标记。另外,在以下多样实施例的说明中,可以省略重复记述相同或对应的构成要素,但这并不意味着该构成要素不包括在该实施例中。
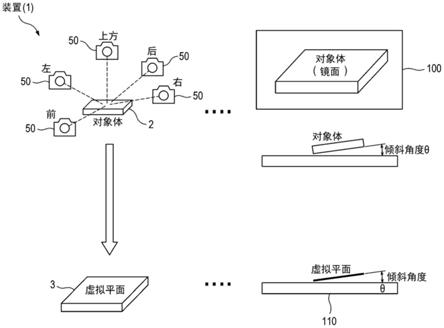
56.图1是示出根据本公开的装置运转的过程的图。根据本公开的装置1可以测量对象体2相对于基准面(例:基板等)的倾斜角度θ。对象体2(例:晶粒等)可以配置于基准面上。根据情况,对象体2可以以相对于基准面倾斜预定角度θ的状态配置100。根据本公开的装置1可以通过测量(确定)该倾斜角度来检查该对象体2的设置是否存在不良。
57.具体地,装置1的照明光源可以向位于基准面上的对象体2照射二维照明光。照明光可以从对象体2的表面,即上面或一个以上的侧面被反射。装置1的一个以上的摄像头50可以捕获(capture)照明光从对象体2反射而生成的一个以上的照明图像。
58.装置1可以在所获得的一个以上的照明图像上确定表示对象体2的边角(edge)的一个以上的轮廓线。各个照明图像可以是表示对象体2乃至对象体2的边角的二维相片。本公开中的对象体的边角可以是指在真实三维空间中存在的对象体所具有的形状的各个边(例:正方体的各个边)。一方面,本公开中的轮廓线可以是指在拍摄对象体的图像上表示的对象体的边角(即,在图像上表示的线)。在本公开中,轮廓线也可以被称为分界线。
59.装置1可以基于所确定的一个以上的轮廓线确定对象体2的上面的边角相对于基
准面所具有的高度值。另外,装置1可以基于该高度值确定对象体2的上面与基准面之间的倾斜角度θ。对象体上面的边角高度可以表示该边角的各个点距离基准面的长度。因此,如果确定对象体上面的边角高度,就可以知道该边角相对于基准面所具有的角度,由此可以确定对象体上面相对于基准面倾斜多少角度。
60.在一实施例,除了照明光之外,装置1还可以追加利用图案光来确定对象体的倾斜角度。具体地,装置1的图案光源可以向对象体2照射图案光。图案光可以从对象体2的表面,即上面或一个以上的侧面被反射。装置1的一个以上的摄像头50可以捕获图案光从对象体2反射而生成的一个以上的图案图像。
61.这种情况下,装置1可以基于一个以上的照明图像及/或一个以上的图案图像确定表示对象体2的边角的一个以上的轮廓线。装置1可以基于所确定的一个以上的轮廓线确定与对象体2的上面对应的虚拟平面3(110)。虚拟平面3可以是利用计算机图形来虚拟地实现在真实三维空间中的对象体2所具有的上面的平面。装置1可以将虚拟平面3与基准面之间的角度确定为是对象体2与基准面之间的角度θ(110)。
62.在一实施例,对象体2可以是具有多个层堆叠形态的堆叠存储器。这种情况下,所提取的一个以上的轮廓线可以指示对象体2的多个层的各个边角。装置1可以基于从拍摄的具有堆叠结构的对象体2的图像所获得的一个以上的轮廓线来确定多个虚拟平面。确定虚拟平面的过程如前述。所确定的多个虚拟平面的各个虚拟平面可以与堆叠结构的对象体2的多个层分别对应。即,一个虚拟平面可以表示多个层中的一个层。装置1可以基于所确定的多个虚拟平面的各个虚拟平面确定堆叠结构的对象体2的多个层各个层之间的间隔(gap)。在一实施例,该过程可以由装置1的处理器执行。
63.根据本公开的多样实施例,当由于作为检查对象的对象体2的上面为反射体而针对上面难以获得用于检查的图像时,装置1也可以利用对于该对象体2的虚拟平面来测量出对象体2的倾斜角度。另外,根据本公开的多样实施例,装置1针对对象体相对于基准面倾斜特定角度(例:1.2度)以上的情况下,也可以生成虚拟平面而导出其倾斜程度。另外,根据本公开的多样实施例,即使由于位于基板的多样半导体元件及结构物等而难以提取作为检查对象的对象体2的明确的图像或轮廓线时,也可以获得必要的相关信息而执行针对对象体2的检查。另外,根据本公开的多样实施例,能够利用以多样角度及方向从多样类型的光源照射的光来获得图像,从而执行针对该对象体的准确的测量。
64.图2是示出根据本公开的一实施例的装置的框图的图。在一实施例,装置1可以包括:一个以上的处理器10、一个以上的存储器20、一个以上的图案光源30、一个以上的照明光源40及/或一个以上的摄像头50。在一实施例,可以省略装置1的这些构成要素中的至少一个,或可以在装置1追加其他的构成要素。在一实施例,部分构成要素可以被追加地(additionally)或替代性地(alternatively)统合实现,或者以单数或复数个体的形式实现。本公开中,一个以上的构成要素(例:一个以上的处理器10)可以表述为构成要素(例:处理器10),只要未在文中明确不同的提及,可以是意味一个或一个以上的构成要素的集合。在一实施例,装置1内/外部的构成要素中的至少一部分构成要素可以通过总线、gpio(general purpose input/output,通用输入/输出口)、spi(serial peripheral interface,串行外设接口)或mipi(mobile industry processor interface,移动产业处理器接口)等相互连接,且发送和接收数据及/或信号。
65.照明光源40可以向对象体2照射二维照明光。在一实施例,照明光可以是rgb光,各个照明光源40可以包括:照射红色(red)光的红色光源,照射绿色(green)光的绿色光源,以及照射青色(blue)光的青色光源。在一实施例,每个照明光源40在照射照明光时,可以照射红色光、绿色光及青色光以饱和(saturation)对象体的表面。
66.图案光源30可以向对象体2照射图案光。在一实施例,图案光可以是结构光,格纹光(光度以正弦波图案变化的光),线性光等等。在一实施例,图案光源30可以照射由诸如pzt(piezo actuator,压电执行器)的格子移送机构相移的图案光,或可以由dlp(digital light processing,数字光处理)方式或者lcos(liquid crystal on silicon,液晶覆硅)方式照射图案光。在一实施例,一个以上的图案光源30分别可以根据从利用pzt的方式、dlp方式及lcos方式中选择的一个方式照射图案光。在一实施例,可以使用在对象体2的上方向相互不同的方向照射图案光的一个以上(例:8个)的图案光源30。
67.如上所述,摄像头50可以捕获照明图像及/或图案图像。在一实施例,摄像头50可以以ccd(charge coupled device,电荷耦合元件)或cmos(complementary metal oxide semiconductor,互补金属氧化物半导体)摄像头。在一实施例,一个以上的摄像头50可以包括:上方摄像头(top camera)及/或一个以上的侧方摄像头(side camera)。上方摄像头可以在对象体2的上方捕获从对象体2反射的照明图像或图案图像。一个以上的侧方摄像头分别可以在对象体2的侧方乃至上侧方捕获从对象体2反射的照明图像或图案图像。在一实施例,一个以上的侧方摄像头可以包括与对象体2的前面(front)、后面(rear)、左侧面(left)及右侧面(right)对应的4个摄像头。在一实施例,可以将由上方摄像头从对象体2的上方捕获的照明图像或图案图像称为上方图像。另外,可以将由一个以上的侧方摄像头从对象体2的一个以上的侧方捕获的照明图像或图案图像称为侧方图像。即,上述的一个以上的照明图像及一个以上的图案图像中的一部分可以是上方图像,另一部分可以是侧方图像。
68.处理器10可以驱动软件(例:命令、程序等)控制与处理器10连接的装置1的至少一个构成要素。另外,处理器10可以执行与本公开相关的多样运算、处理、数据生成、加工等动作。另外,处理器10可以从存储器20加载数据等或存储至存储器20。在一实施例,处理器10可以在一个以上的照明图像上确定对象体2的一个以上的轮廓线,基于一个以上的轮廓线确定对象体上面的边角的高度值,基于高度值确定对象体上面与基准面之间的角度θ。另外,在一实施例,处理器10可以基于一个以上的照明图像及/或一个以上的图案图像确定表示对象体2的边角的一个以上的轮廓线,基于一个以上的轮廓线确定与对象体上面对应的虚拟平面3,将虚拟平面3与基准面之间的角度确定为对象体2的倾斜角度θ。
69.存储器20可以存储多样数据。存储在存储器20的数据作为由装置1的至少一个构成要素获得、处理、或使用的数据,可以包括软件(例:命令、程序等)。存储器20可以包括挥发性及/或非挥发性存储器。在本公开中,命令乃至程序作为存储在存储器20的软件,可以包括用于控制装置1资源的操作系统、应用程序及/或向应用程序提供多样功能以使应用程序可以利用装置1的资源的中间件。在一实施例,存储器20可以存储命令,所述指令在由处理器10执行时使得处理器10执行运算。
70.在一实施例,装置1还可以包括收发器(未图示)。收发器可以执行装置1和服务器或装置1和其他装置之间的无线或有线通信。例如,收发器可以执行embb(enhanced mobile broadband,增强型移动宽带)、urllc(ultra reliable low
‑
latency communications,超
可靠低延迟通信)、mmtc(massive machine type communications,大型机器类型通信)、lte(long
‑
term evolution,长期演进)、lte
‑
a(lte advance,lte升级版)、nr(new radio,新无线电技术)、umts(universal mobile telecommunications system,通用移动通信系统)、gsm(global system for mobile communications,全球移动通信系统)、cdma(code division multiple access,码分多址)、wcdma(wideband cdma,宽带cdma)、wibro(wireless broadband,无线宽带)、wifi(wireless fidelity,无线保真)、蓝牙(bluetooth)、nfc(near field communication,近场通信)、gps(global positioning system,全球定位系统)或gnss(global navigation satellite system,全球导航卫星系统)等方式的无线通信。例如,收发器可以执行usb(universal serial bus,通用串行总线)、hdmi(high definition multimedia interface,高清晰度多媒体接口)、rs
‑
232(recommended standard
‑
232,推荐标准
‑
232)或pots(plain old telephone service,普通老式电话业务)等方式的有线通信。在一实施例,处理器10可以控制收发器而从服务器获得信息。从服务器获得的信息可以存储在存储器20。在一实施例,从服务器获得的信息可以包括从图像提取轮廓线、或导出所提取的轮廓线之间的关系信息、或生成虚拟三维模型3所需的参数乃至信息。在一实施例,从服务器获得的信息可以包括用于校准摄像头50的摄像头50的内部(intrinsic)或外部(extrinsic)参数值。
71.在一实施例,装置1还可以包括用户界面(未图示)。用户界面可以从用户接收输入,并向用户输出(表示)信息。在一实施例,用户界面可以包括输入装置及/或输出装置。输入装置可以是从外部接收用于向装置1的至少一个构成要素传送的数据的装置。例如,输入装置可以包括鼠标、键盘、触控板等。输出装置可以是将装置1的多样数据以视觉形态提供给用户的装置。例如,输出装置可以包括显示器、投影仪、全息图。在一实施例,用户界面可以接收用户输入的用于检查对象体2的参数,或向用户显示导出的对象体2的倾斜角度θ。
72.在一实施例,装置1可以是多样形态的装置。例如,装置1可以是便携通信装置、计算机装置、便携多媒体装置、或根据所述装置中的一个或一个以上的组合的装置。但是本公开的装置1不限定于前述装置。
73.根据本公开的装置1的多样实施例可以相互组合。可以根据情况的数量组合各个实施例,组合而成的装置1的实施例仍然属于本公开的范围中。另外,前述的根据本公开的装置1的内/外部构成要素可以根据实施例追加、变更、替代或删除。另外,前述装置1的内/外部构成要素可以由硬件组件实现。
74.图3是示出根据本公开的一实施例生成相对于对象体上面的虚拟平面的过程的图。生成虚拟平面3的过程可以包括校准过程、提取轮廓线过程、导出轮廓线之间的关系信息的过程及/或生成虚拟平面过程。
75.在校准过程(未图示)中,装置1可以执行摄像头50的校准。装置1可以通过校准过程来获得生成相对于对象体上面的虚拟平面所必要的基本信息。具体地,在此过程中,装置1可以获得各个摄像头50的位置信息,即原点位置信息。其中,摄像头50的原点位置是指,将摄像头视为一个点时,该点在三维空间上的位置。根据实施例,摄像头50的位置可以表示为相对于对象体2的相对位置,也可以表示为在三维空间坐标系上的绝对位置。另外,在校准过程中,装置1可以获得各个摄像头50的视角信息及/或内部参数(intrinsic parameters)。在校准过程中获得的信息可以存储在存储器20中。在一实施例,校准相关信
息可以通过收发器而从服务器获得。在一实施例,校准过程作为可选(optional)过程可以被省略。
76.以下,对提取轮廓线过程、导出轮廓线之间的关系信息的过程及生成虚拟平面过程进行说明。这些过程可以利用从照明图像及图案图像中选择的任意两个图像执行,但为了说明的方便,以上方图像(top)及一个侧方图像(left)为基准进行说明。
77.在提取轮廓线过程s3010中,处理器10可以从上方图像及侧方图像提取轮廓线。所提取的轮廓线中,可以存在将对象体2的相同的一个边角在相互不同的图像中表示的轮廓线。例如,处理器10可以在上方图像中提取表示对象体2的一个边角的轮廓线(以下称第一轮廓线),且在侧方图像中提取表示相同的该边角的轮廓线(以下称第二轮廓线)。
78.在导出轮廓线之间的关系信息的过程s3020中,处理器10可以确定(导出)第一轮廓线及第二轮廓线之间的关系信息(以下称第一关系信息)。其中,两个轮廓线共同表示的对象体2的边角可以是对象体2的相邻的两个表面共有的边角。具体地,第一轮廓线上的一个点(以下称第一点)及第二轮廓线上的一个点(以下称第二点)共同表示对象体的真实边角上的一个点(以下称对象点),因此可以相互对应。当从上方摄像头观察对象点时,对象点在上面图像上可以表示为第一点。假设存在从上方摄像头的原点连接对象点的三维空间上的直线,则如果从侧方摄像头处观察该直线时,该直线会在侧方图像上表示为二维直线。该二维直线被称为相对于第一点的极线(epipolar line)。在该侧方图像上,可以导出相对于第一点的极线及第二轮廓线之间的交叉点,该交叉点可以是第二点(即,对应第一点的点)。从第一点到相对于第一点的极线的变换关系可以由基本矩阵(fundamental matrix)所定义,基本矩阵作为根据对极几何学(epipolar geometry)的概念,可以由前述的摄像头校准信息来导出。
79.在一实施例,第一关系信息可以包括关于对应的两个点(第一点、第二点)的信息。在一实施例,第一关系信息可以是该两个点(第一点、第二点)的一对二维像素坐标,或一对三维空间坐标,或两个坐标之间的变换关系式或变换矩阵。
80.在生成虚拟平面过程s3030中,处理器10可以利用所确定的第一关系信息来确定(生成)与对象体上面对应的虚拟平面3。具体地,处理器10可以利用第一关系信息获得从上方摄像头的原点至第一点坐标的矢量,且获得从侧方摄像头的原点至第二点坐标的矢量,从而导出两个矢量相遇的点。可以利用以这种方式导出的点执行针对整个对象体上面的三维建模。
81.虽然以上方图像(top)及一个侧方图像(left)为基准说明了虚拟平面3的生成过程,但是,如上所述,也可以利用多个侧方图像中的相互不同的两个侧方图像生成虚拟平面3。这种情况下,处理器10可以在侧方图像中一个图像中提取表示对象体2的一个边角的轮廓线(以下称第三轮廓线),且在侧方图像中的另一个图像中提取表示相同的边角的轮廓线(以下称第四轮廓线)。处理器10还可以获得指示第三轮廓线及第四轮廓线之间的对应关系的关系信息(以下称第二关系信息)。处理器10可以基于第一关系信息及/或第二关系信息确定虚拟平面3。
82.在一实施例,处理器10从图像获得关系信息的过程s3020可以反复执行多次。获得关系信息的过程可以根据各个上方图像、侧方图像等的组合而反复执行多次。在一实施例,处理器10可以根据照明图像或图案图像的类型,针对相同的表面采用不同的用于获得关系
信息的图像,执行多次获得关系信息的过程。在一实施例,处理器10可以根据照明光源或图案光源的照射角度及方向,针对相同的表面执行多次获得关系信息的过程。
83.图4是说明根据本公开的一实施例的用于获得多样图像及确定关系信息的图像组合的图。装置1可以从对象体获得多个图像。可获得的图像根据使用的光的类型、光的照射方向、光的照射角度而多样。
84.在一实施例,装置1根据用于捕获的光是照明光或图案光而对于对象体的一方向可以获得多个照明图像或图案图像。即,对于对象体的同一个表面,也可以根据使用的光的类型而获得多个图像。
85.在一实施例,装置1根据图案光源30或照明光源40向对象体照射光的方向乃至角度,对于对象体的一方向可以获得多个图像。例如,一个以上的图案光源30可以配置在多样位置(例:8个方向(8
‑
way))而向对象体照射图案光。对于图案光源30的配置将在后文说明。根据照射的图案光的方向,对于对象体的同一个表面可以获得多个图案图像。另外,例如,一个以上的照明光源40可以在多样角度向对象体照射照明光。对于照明光源40的配置将在后文说明。根据照射的照明光的角度,对于对象体的同一个表面可以获得多个照明图像。
86.在一实施例,如上所述,装置1可以在对于对象体的各个方向所获得的照明图像或图案图像中选择对于两个相互不同方向的图像(上方图像、各个方向的侧方图像等),从而从两个图像导出轮廓线之间的关系信息。首先,处理器10可以选择上方图像和一个侧方图像,由此导出第一关系信息。上方图像可以表示对象体的上面,一个侧方图像可以表示对象体的上面及一个以上的侧面。由于对象体的上面和侧面共有边角,因此可以从上方图像和侧方图像导出第一关系信息。例如,当对象体为长方体时,分别可以导出4个第一关系信息。
87.其次,处理器10可以在一个以上的侧方图像中选择两个不同方向上的侧方图像,由此导出第二关系信息。两个侧方图像可以表示对象体的相邻的两个侧面。由于相邻的两个侧面共有对象体的边角,因此可以从两个侧方图像导出第二关系信息。例如,当对象体为长方体时,分别可以导出4个第二关系信息。
88.第三,处理器10可以在一个以上的侧方图像中选择表示没有共有边角的对象体的两个侧面的两个侧方图像,由此导出关系信息(以下称第三关系信息)。这种情况下也可以利用极线导出第三关系信息。具体地,当对象体为长方体时,平行的两个侧面可以共有平行的两个边角。一个侧方图像上的一个轮廓线上的一个点,在平行的另一个侧方图像上可以表示为直线(极线)。该极线与另一个侧方图像上的轮廓线交叉的点可以与首个侧方图像上的一点相互对应。可以导出指示这种对应关系的第三关系信息。例如,当对象体为长方体时,第三关系信息可以分别导出2个。
89.处理器10可以利用前述第一关系信息、第二关系信息及/或第三关系信息中的至少一个来导出相对于对象体上面的虚拟平面3。可以根据作为关系信息的导出对象的两个图像可被选择的组合、照射方向乃至角度及照明类型来获得多样关系信息,处理器10可以利用多样关系信息更加准确的生成虚拟平面。
90.图5是示出根据本公开的一实施例的一个以上的图案光源30配置形态的图。如上所述,装置1可以包括一个以上的图案光源30。图案光源30可以配置在对象体2周边的多样位置而向对象体2照射图案光。
91.在图示的实施例5010中,图案光源30可以是位于对象体2的上面的法线4上且向对
象体2照射图案光的一个光源。具体地,可以画出垂直于对象体2的上面的法线4。一个图案光源30可以位于该法线4上的一个点。该图案光源30可以向对象体2的上面照射图案光。在一实施例,法线4可以画为从对象体2上面的中心向基准面的反方向延伸的半直线。根据实施例,该一个图案光源30与对象体2之间的距离可以被变更。在一实施例,该一个图案光源30可以改变图案的相位(phase)而依次顺序地多次向对象体2照射图案光。
92.在图示的实施例5020中,图案光源30可以是配置在对象体上面的同心圆5上的多个图案光源30。具体地,可以假定以对象体上面的法线4上的一个点作为圆的中心且平行于基准面的同心圆5。可以在该同心圆5的圆周上配置有多个图案光源30。该多个图案光源30可以向对象体2照射图案光。根据实施例,同心圆5的半径可以被变更。根据实施例,在同心圆5上排列的多个图案光源30的间隔可以被变更。在一实施例,多个图案光源30可以以相同间隔配置在同心圆5的圆周上,或者以任意设置的相互不同的间隔配置在圆周上。在一实施例,多个图案光源30可以以45度间隔来总共排列有8个。这种情况下,可以将多个图案光源30的配置称为8方向(8
‑
way)配置。在一实施例,多个图案光源30可以依次顺序地向对象体2照射图案光。在一实施例,多个图案光源30照射的图案光的图案分别可以具有不同的相位(phase)。
93.图6是示出根据本公开的一实施例的一个以上的照明光源的配置形态的图。如上所述,装置1可以包括一个以上的照明光源40。照明光源40可以配置在对象体周边的多样位置而向对象体照射照明光。
94.在图示的实施例中,照明光源40可以是配置在垂直于基准面的同心圆6上的多个照明光源40。具体地,可以假定以对象体2作为圆的中心,且垂直于基准面的同心圆6。可以在该同心圆6的圆周上配置有多个照明光源40。该多个照明光源40可以向对象体照射照明光。
95.根据实施例,同心圆6的半径可以被变更。根据实施例,配置于同心圆6的多个照明光源40的间隔可以被变更。在一实施例,多个照明光源40可以以相同间隔配置在同心圆6的圆周上,或者以任意设置的相互不同的间隔配置在圆周上。在一实施例,多个照明光源40分别可以配置为任意的角度。这里的角度可以是指圆周上的照明光源40的位置相对于基准面的法线所具有的角度。在一实施例,多个照明光源40中的至少一个可以以70度以上的高角度(以基准面为基准的低角度)配置。在一实施例,多个照明光源40可以分别以17度,40度,58度,70度的角度配置。在一实施例,多个照明光源40可以只在基准面上侧配置。在一实施例,多个照明光源40可以依次顺序地向着对象体2照射照明光。在一实施例,多个照明光源40所照射的照明光可以分别具有不同波长。在一实施例,多个照明光源40分别可以包括能够分别照射红色光、绿色光、青色光的红色光源、绿色光源、青色光源。在一实施例,多个照明光源40可以首先将一种波长的光(例:红色光)根据配置的角度依次顺序地向对象体照射。然后,多个照明光源40可以将不同波长的光(例:绿色光)根据角度依次顺序地向对象体照射,然后将剩余波长的光(例:青色光)根据角度依次顺序地向对象体照射。在一实施例,多个照明光源40可以对于一个角度依次顺序地照射红色光、绿色光、青色光,然后再对于下一个角度依次顺序地照射红色光、绿色光、青色光。在一实施例,分别照射红色光、绿色光、青色光时,照射顺序可以根据设计者的意图来变更。在一实施例,各个照明光源40照射二维照明光时,可以同时照射红色光、绿色光、青色光而将混合的白色光照射到对象体。在一实
施例,各个照明光源40可以向对象体照射普通白色光而不是混合的白色光。在一实施例,按照各个角度配置的多个照明光源40分别可以同时照射混合的白色光以使对象体的表面饱和(saturation)。此时可以捕获反射的照明光而获得对于对象体表面的照明图像。
96.图7是示出根据本公开的一实施例的图像的过滤过程的图。在一实施例,处理器10可以将根据多样因素(光的类型、照射方向、角度等)获得的图像以预设标准过滤后,仅利用筛选出的图像生成虚拟平面3。装置1在检查基板上的对象体(例:晶粒)时,可以受到基板的其他元件及凹凸等的影响。由这些影响,获得的图像自身可能会发生失真,或从这些图像获得的轮廓线可能会发生失真。基于失真的图像乃至轮廓线生成虚拟平面3时,可能难以准确地进行针对对象体2的测量乃至检查。为防止这一点,可以根据预设标准仅筛选出过滤的图像而用于虚拟平面3的生成。
97.在一实施例,处理器10可以以出现在图像上的对象体2表面的对比(contrast)值是否大于预设值作为基准来执行过滤。处理器10可以废弃对比值未满预设值的图像,只选择对比值为预设值以上的图像而由此确定(导出)前述关系信息。
98.在一实施例,处理器10可以以出现在图像上的轮廓线是否具有连续性作为基准执行过滤。处理器10可以只筛选出表示对象体的一个边角的轮廓线由具有连续性的线段来表示的图像而由此确定前述关系信息。另外,在一实施例,处理器10可以统计性地计算从多个图像提取的轮廓线位置坐标的平均值或中间值,且在这些值中排除提取出具有偏离预设比例以上的位置坐标的轮廓线的图像。这种情况下,处理器10可以只由未被排除的图像确定前述关系信息。
99.图8是示出从根据本公开的一实施例的图像的由一个轮廓线导出另一个轮廓线的过程的图。在一实施例,处理器10可以利用预先存储的对象体2的规格信息由一个轮廓线确定另一个轮廓线。如上所述,装置1在检查基板的对象体时,可以受到基板的其他元件及凹凸等的影响。由此,可能会无法提取确定关系信息所必要的轮廓线。此时,为了补充提取轮廓线过程,可以利用预先存储的对象体2的规格信息,由一个轮廓线导出另一个轮廓线。
100.具体地,存储器20可以包括对象体2的规格信息。规格信息可以包括对象体2的长度、宽度及高度信息。处理器10从图像导出一个轮廓线后,处理器10可以利用规格信息来预测并导出位于与该轮廓线平行的位置的轮廓线的位置。例如可以假设提取了对象体2下面的轮廓线8010,且因规定的失真而未能提取位于与下面轮廓线平行的位置的上面轮廓线。这种情况下,处理器10可以基于规格信息获得该对象体2的高度信息,在提取的下面轮廓线适用高度信息,从而预测出平行位置的上面轮廓线的位置。能够由此方式提取上面轮廓线8020。
101.因图像乃至轮廓线的失真而无法导出确定关系信息所必要的轮廓线时,处理器10可以先提取平行于这个必要的轮廓线的轮廓线,然后如上所述地适用规格信息提取必要的轮廓线。处理器10可以利用确定关系信息所必要的轮廓线来确定关系信息8030。
102.在一实施例,当对象体2不是长方体的情况下,规格信息也可以包括关于该对象体的形状的信息。例如,对象体为圆柱形态时,规格信息可以存储有关于圆柱的半径及高度的信息。处理器10可以利用半径及高度信息,从一个轮廓线导出确定关系信息所必要的其他轮廓线。
103.在一实施例,存储器20可以执行存储作为检查对象的对象体的规格信息的数据库
的作用。存储器20可以存储关于位于基板上的或通常使用的对象体(例:元件、芯片等)的规格信息。在一实施例,处理器10从获得的图像中识别对象体是什么,然后可以从存储器20读取与识别的对象体相应的规格信息。处理器10可以基于获得的规格信息,从识别的对象体的一个轮廓线导出确定关系信息所必要的其他轮廓线。在一实施例,处理器10可以控制收发器而从服务器获得对象体的规格信息。获得的规格信息可以存储在存储器20。
104.图9是示出能够由根据本公开的装置1执行的用于检查的方法的一实施例的图。根据本公开的用于检查的方法可以是由计算机实现的方法。在图示的流程图中,按顺序依次说明了根据本公开的方法或算法的各个步骤,但各个步骤除了按照顺序执行外,还可以按照可以由本公开任意组合的顺序来执行。根据本流程图的说明不排除对方法或算法进行变更或修改,且不意味任意步骤是必要的或优选的。在一实施例,至少一部分步骤可以被并行、反复或启发式地执行。在一实施例,可以省略至少一部分步骤,或追加其他步骤。
105.根据本公开的装置1可以执行根据本公开的多样实施例的用于检查的方法。根据本公开的一实施例的方法,可以包括:向位于基准面上的对象体照射照明光的步骤s910;捕获照明光从所述对象体反射而生成的一个以上的照明图像的步骤s920;在一个以上的照明图像上确定表示对象体的边角的一个以上的轮廓线的步骤s930;基于一个以上的轮廓线确定对象体上面的边角相对于基准面的高度值的步骤s940;及/或基于高度值确定对象体上面与基准面之间的第一角度的步骤s950。
106.在步骤s910中,装置1的至少一个第一光源(例:照明光源40)可以向位于基准面上的对象体2照射照明光。在步骤s920中,装置1的一个以上的摄像头50可以捕获照明光从对象体2反射而生成的一个以上的照明图像。
107.在步骤s930中,装置1的一个以上的处理器10可以在一个以上的照明图像上确定表示对象体2的边角的一个以上的轮廓线。在步骤s940中,处理器10可以基于一个以上的轮廓线确定对象体上面的边角相对于基准面的高度值。在步骤s950中,处理器10可以基于高度值确定对象体上面与基准面之间的第一角度(例:角度θ)。
108.在一实施例,根据本公开的方法还可以包括:装置1的至少一个第二光源(例:图案光源30)向对象体2照射图案光的步骤;一个以上的摄像头50捕获图案光从对象体2反射而生成的一个以上的图案图像的步骤;处理器10基于一个以上的照明图像及一个以上的图案图像确定表示对象体2的边角的一个以上的轮廓线的步骤;处理器10基于一个以上的轮廓线确定与对象体2的上面对应的虚拟平面3的步骤;及/或处理器10将虚拟平面3与基准面之间的第二角度确定为第一角度的步骤。
109.在一实施例,确定虚拟平面的步骤可以包括:提取表示对象体2的相同的一个边角的上方图像上的第一轮廓线及所述一个以上的侧方图像上的第二轮廓线的步骤;及/或基于第一轮廓线及第二轮廓线确定虚拟平面3的步骤。
110.在一实施例,确定虚拟平面的步骤还可以包括:确定指示第一轮廓线及第二轮廓线之间的对应关系的第一关系信息的步骤;及/或根据第一关系信息确定虚拟平面3的步骤。
111.在一实施例,确定虚拟平面的步骤还可以包括:在一个以上的侧方图像中,提取表示对象体的相同的一个边角的一个侧方图像上的第三轮廓线及另一个侧方图像上的第四轮廓线的步骤;确定指示第三轮廓线及第四轮廓线之间的对应关系的第二关系信息的步
骤;及/或基于第一关系信息及第二关系信息确定虚拟平面3的步骤。
112.在一实施例,确定虚拟平面的步骤可以包括:在一个以上的照明图像及一个以上的图案图像中,选择对象体表面的对比(contrast)值为预设值以上的图像而确定虚拟平面3的步骤。
113.本公开的多样实施例可以以在机器(machine)可读的记录介质(machine
‑
readable recording medium)中记录的软件实现。软件可以是用于实现所述本公开的多样实施例的软件。软件可以由本公开所属技术领域的程序员从本公开的多样实施例来推想。例如软件可以是机器可读的命令(例:代码或代码段)或程序。机器是可以根据从记录介质调用的命令运转的装置,例如可以是计算机。在一实施例,机器可以是根据本公开的实施例的电子装置1。在一实施例,机器的处理器可以运转调用的命令,从而使得机器的构成要素执行与该命令相应的功能。在一实施例,处理器可以是根据本公开的实施例的一个以上的处理器10。记录介质可以是指机器可读且可以存储数据的所有类型的记录介质(recording medium)。例如,记录介质可以包括rom、ram、cd
‑
rom、磁带、软盘、光数据存储装置等。在一实施例,记录介质可以是一个以上的存储器20。在一实施例,记录介质可以在由网络连接的计算机系统等以分散形态实现。软件可以被分散在计算机系统等而存储并执行。记录介质可以是非暂时性(non
‑
transitory)记录介质。非暂时性记录介质意味着与数据是半永久性或临时性存储无关的有形介质(tangible medium),且不包括一时性地(transitory)传播的信号(signal)。
114.以上,根据多样实施例说明了本公开的技术思想,但本公开的技术思想包括可以在本公开所属领域的普通技术人员可以理解的范围内进行的多种置换、变形及变更。另外,应当理解,这样的置换、变形及变更可以包括在所附权利要求的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1