高速旋转分拣器的制作方法
高速旋转分拣器
1.本申请是申请日为2016年4月5日、申请号为201680001403.5、发明名称为“高速旋转分拣器”的发明专利申请的分案申请。
技术领域
2.本公开内容的实施方式一般涉及半导体检查设备。更具体地,本文公开的实施方式涉及用于高速分拣基板的系统和方法。
背景技术:
3.基板如半导体基板在处理期间于独立检查站处受到常规检查,以确保符合预定的质量控制标准。不同的检查技术提供了关于产品和工艺的全面数据。然而,由于所需检查站的数量以及所导致的在所述检查站之间移动基板的传送时间的缘故,全面检查可能十分耗时,从而减少了产量。因此,设备制造商往往面临着在具有繁重检查/传送时间的彻底检查或者先前的某些检查过程之间进行选择决策。
4.典型的分拣系统在直线排列中每小时分拣大约3600个基板。然而,当检查过程已经持续缩短完成检查步骤的时间量时,需要能够跟得上更快速分拣的分拣装置来提高产量。
5.如先前所说明,存在着对以更快的速度分拣检查后的基板并且允许实现更高产量的改进基板检查系统的需求。因此,在本领域中存在着对高速旋转分拣器的需求。
技术实现要素:
6.在一个实施方式中,公开了一种用于检查和分拣多个基板的装置。所述装置包括可旋转支撑件。所述可旋转支撑件设置在分拣单元内并且被构造成用于绕旋转轴旋转。多个臂耦接到可旋转支撑件并且相对于旋转轴径向向外延伸。至少一个夹持器耦接到每个臂并且可定位在多个仓上。每个仓位于分拣单元内,且位于所述至少一个夹持器随着可旋转支撑件旋转而行进所沿的路径下方。
7.在另一个实施方式中,公开了一种适用于检查和分拣基板的装置。所述装置包括装载单元、计量单元、分拣单元以及多个可单独去除的分拣仓。所述计量单元与所述装载单元耦接。所述分拣单元与所述计量单元耦接。分拣单元包括:位于分拣单元内的平台、多个臂以及至少一个夹持器。平台被构造成绕平台的中心轴旋转。所述多个臂中的每个臂具有第一端和第二端。所述第一端耦接至所述平台。所述多个臂中的每个臂进一步从平台的中心轴径向向外延伸。所述至少一个夹持器耦接至所述多个臂中的每一个臂的第二端。所述多个可单独去除的分拣仓中的每一个位于所述分拣单元内且位于所述至少一个夹持器随着所述至少一个夹持器旋转行进所沿的路径下方。
8.在又一个实施方式中,公开了一种操作用于检查和分拣外壳中的多个基板的装置的方法。所述方法包括:将基板装载到所述外壳的装载单元中;将基板传送到所述外壳的计量单元中;在计量单元中执行对基板的计量;基于计量将基板分配至分拣仓;以及将所述基
板传送至分拣单元。传送基板的步骤可包括:用分拣模块的至少一个夹持器保持基板;将由所述至少一个夹持器保持的基板绕分拣单元的中心轴旋转到分配给所保持的基板的分拣仓上方的期望位置;以及将所述基板从所述至少一个夹持器释放到所分配的分拣仓中。
附图说明
9.为了可以详细地理解本公开的上述特征,可以通过参考实施方式来实现对上面简要概述的本公开内容的更具体的描述,其中一些实施方式在附图中示出。然而,应注意,附图仅说明了本公开内容的示例性实施方式并且因此不应被视为限制本公开内容的范围,因为本公开内容可适用于其他同等有效的实施方式。
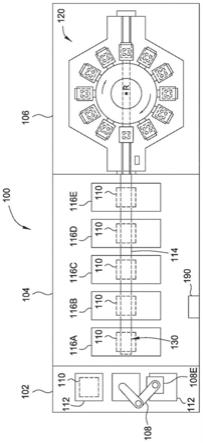
10.图1示出了根据一个实施方式的检查系统的俯视平面图。
11.图2示出了根据一个实施方式的图1的检查系统的高速旋转分拣器的俯视平面图。
12.图3示出了根据一个实施方式的高速旋转分拣器的至少一个伯努利拾取器的透视图。
13.图4示出了根据一个实施方式的分拣仓的俯视平面图。
14.图5示出了根据一个实施方式的用于分拣基板的方法的流程图。
15.为促进理解,已经尽可能使用相同的元件符号来表示诸图共有的相同元件。应当理解,一个实施方式的元件和特征可被有利地并入其他实施方式中,而无需进一步叙述。
具体实施方式
16.本公开内容的实施方式一般涉及可扩展的基板检查系统。所述检查系统包括适于分析基板的一种或多种特征(包括,仅举例来说,厚度、电阻率、锯痕(saw mark)、几何形状、污点、碎片(chip)、微裂纹(micro crack)以及晶体片段(crystal fraction))的多个计量单元。检查系统可用于在处理基板之前辨识基板上的缺陷并估计单元效率(cell efficiency)。可将基板传送通过检查系统和/或在轨道或输送装置系统上的计量单元之间传送,然后基于检查数据通过与高速旋转分拣装置耦接的至少一个夹持器分拣到相应仓中。分拣装置维持每小时至少5400个基板的分拣能力。每个仓可任选地具有气体支撑垫,此气体支撑垫用于在基板从旋转分拣装置落入相应仓中时支撑基板。
17.图1示出了根据一个实施例实施方式的检查系统100的俯视平面图。所述检查系统100包括前端102、模块单元104以及分拣单元106。前端102可为例如装载单元。模块单元104可为例如计量单元。分拣单元106可为例如分拣模块。仅举例而言,前端102、模块单元104和分拣单元106可以相对于它们中的另一个直线设置。前端102包括具有支撑元件108e(诸如抽吸元件、终端受动器以及用于夹持和传送基板110的夹持器夹钳)的传送机器人108。传送机器人108适于将基板110从位于前端102内的一个或多个盒112传送到输送装置系统114。输送装置系统114可为电机驱动的输送装置系统,并且可包括一个或多个输送装置,诸如由致动器通过辊和/或驱动齿轮驱动的运输带或轨道。输送装置系统114可以直线布置设置,以将从传送机器人108接收的基板传送通过模块单元104。如此,输送装置系统114设置在模块单元104内,并且促成传送基板110通过模块单元104。附加的模块单元可定位在前端102和模块单元104之间,和/或在模块单元104和分拣单元106之间,和/或在分拣单元106之后,以促成检查系统100的扩展。
18.前端102接收一个或多个盒112。每个盒112可容纳堆叠构造的基板110。例如,所述基板可为水平或垂直堆叠。例如,每个盒112可以在其中包括多个槽,并且每个槽被构造用于保持基板110。又例如,盒112可以被定位成使基板110彼此叠置。通过传送机器人108将基板110从所述盒112传送到输送装置系统114,以传送通过系统100。前端102包括具有适于呈现与在前端102中发生的操作(包括处理度量、批号等)相关的信息的图形用户界面的计算机(图中未示出)。在一个实例中,计算机可以包括触摸屏界面。
19.模块单元104可包括一个或多个计量站。在图1的实施方式中,模块单元104包括五个计量站116a
‑
116e。应设想到,当空间允许时,还可以通过向模块单元104中加入或减少计量站,而不是加入第二模块单元来改进检查系统100,从而增大产量和/或所执行的计量过程的次数。
20.仅举例来说,计量站可包括以下中的任何一个:微裂纹检查单元、厚度测量单元、电阻率测量单元、光致发光单元、几何形状检查单元、锯痕检测单元、污点检测单元、碎片检测单元和/或晶体片段检测单元。仅举例来说,微裂纹检查单元可被构造用于检查基板裂纹,以及用于任选地测定基板的晶体片段。仅举例来说,几何形状检查单元可被构造用于分析基板的表面性质。仅举例来说,锯痕检测单元可被构造用于辨识基板上的锯痕,包括凹槽、断阶(step)和双断阶标记。计量站还可包括除上文列出的那些之外的其他实例。
21.进一步举例来说并且仅出于说明目的,计量站116b可为适于测量基板厚度的厚度测量单元。计量站116b还可替代地测量基板110的电阻率。计量站116b接收在计量站116a中检查之后沿着输送装置系统114传送的基板110,计量站116a可为任何类型的计量站。计量站116b沿着由输送装置系统114限定的位于计量站116a的位置的下游的基板110的同一直线路径设置。计量站116b对基板110执行一个或多个检查过程。在计量站116b处发生的检查过程可以在基板运动时执行;然而,应设想到的是,可以停止基板110的运动,以助于增大检查的精确度。
22.进一步举例而言并且仅出于说明目的,计量站116c可以是被构造用于检测缺陷和/或执行杂质测量的光致发光单元,并且计量站116d可以是被构造用于分析基板110的几何形状和表面性质的几何形状检查单元。
23.计量站116c接收在计量站116b中检查后沿着输送装置系统114传送的基板110。计量站116d接收在计量站116c中检查后沿着输送装置系统114传送的基板110。计量站116e接收在计量站116d中检查后沿着输送装置系统114传送的基板110,如果在如图所示的直线路径中额外的计量单元,则依此类推。另外,在一些实施方式中,可以利用非直线路径检查。因此,可将基板110以非直线方式,诸如以圆形方式或以弓形方式,在计量站116a
‑
116e之间传送。
24.输送装置系统114将检查后的基板110从模块单元104朝向分拣单元106输送。输送装置系统114可以将检查后的基板110递送到分拣单元106中容纳的旋转分拣系统120附近的位置处。另外,输送装置系统114可通过分拣单元106延续至连接器150。如此,如果分拣单元106不分拣基板110,则检查后的基板110可绕过分拣单元106的旋转分拣系统120。此外,如果检查后的基板110未被旋转分拣系统120拾取,则基板可沿着输送装置系统114继续朝向连接器150移动。在某些实施方式中,未被旋转分拣系统120拾取的基板可沿着输送装置系统114继续移动,所述输送装置系统114可能通往未分拣基板仓。在某些实施方式中,分拣
单元106可进一步通过连接器150与附加单元连接,诸如,仅举例来说,所述附加单元为附加检查系统、,附加分拣单元、附加计量单元等等。连接器150可进一步允许输送装置系统114与附加单元(诸如,仅举例来说,附加检查系统、附加分拣单元、附加计量单元等等)的输送装置系统对齐。
25.检查系统100还可包括控制器190。控制器有助于系统100的控制和自动化。控制器190可与输送装置系统114、前端102、模块单元104、分拣单元106、传送机器人108和/或计量站116a
‑
116e中的一个或多个耦接或相互通信。检查系统100可以向控制器190提供关于基板运动、基板传送、基板分拣和/或所执行的计量的信息。
26.控制器190可以包括中央处理单元(cpu)(图中未示出),存储器(图中未示出)和支持电路(或i/o)(图中未示出)。cpu可以是在工业设置中用于控制各种工艺和硬件(例如,图形发生器、电动机和其他硬件)和监测工艺(例如,处理时间和基板定位或位置)的任何形式的计算机处理器中的一种。存储器(图中未示出)连接到cpu,并且可以是一种或多种易获得的存储器,如随机存取存储器(ram)、只读存储器(rom)、软盘、硬盘或任何其他形式的本地或远程数字存储器。软件指令和数据可以被编码并存储在存储器中以用于命令cpu。支持电路(图中未示出)也连接到cpu,以用于以常规方式支持处理器。支持电路可包括常规高速缓存、电源、时钟电路、输入/输出电路系统、子系统和类似物。可由控制器190读取的程序(或计算机指令)决定可对基板执行哪些任务。所述程序可为可由控制器190读取的软件,并且可包括用于监视和控制例如检查系统100内的处理时间和基板定位或位置的代码。
27.图2示出容纳在分拣单元106内的图1的旋转分拣系统120的俯视平面图。旋转分拣系统120包括容纳在旋转分拣系统120内的可旋转支撑件122。可旋转支撑件122具有旋转轴r。可旋转支撑件122可为旋转盘、圆形支撑件或者用于有效分拣基板110的任何其他形状。可旋转支撑件122包括多个臂124。每个臂124具有第一端126和第二端128。每个臂124的第一端126通过合适的连接方式(例如焊接连接、销接连接、紧固连接等)耦接至可旋转支撑件122。每个臂124的第二端128相对于旋转轴r径向向外延伸。在一个实施方式中,可旋转支撑件122可包括至少十二个臂124,诸如十四个臂或十六个臂;然而,应设想到,可以利用任何数量的臂124,仅举例来说,十个或更多的臂124。
28.至少一个夹持器130耦接至每个臂124的第二端128。每个夹持器130可以设置在每个臂124的底侧或端部,使得一旦检查后的基板110到达分拣单元106,每个夹持器130可以抓取基板110。仅举例来说,每一夹持器130可为抽吸夹持器、爪夹持器、磁性夹持器、或者拾取器。在一个实施方式中,每个夹持器130是伯努利拾取器。
29.一个或多个分拣仓140设置在旋转轴r的径向外侧。在一个实施方式中,仅举例来说,采用了至少十个分拣仓140;然而,应设想到,可以采用任何数量的分拣仓140,诸如六个、八个或十二个分拣仓140。当多个臂124由可旋转支撑件122旋转时,分拣仓140可定位在夹持器130所采取的路径正下方。在一种操作模式中,旋转分拣系统120可以步进方式绕旋转轴r旋转,使得当每个基板110进入分拣单元106时,旋转分拣系统120停止以从输送装置系统114夹持(即,拾取)基板110。分拣仓140被定位成可接收来自旋转分拣系统120的基板110。基板110可响应于在计量站116a
‑
116e中执行的检查过程中的一个或多个检查过程期间所测定的一种或多种基板特性而被分拣到分拣仓140中。旋转分拣系统120将基板110定位在被指定用于接收具有至少一种预定基板特性的基板的分拣仓140上方。然后将基板110
从相应的一个或多个夹持器130释放到合适的分拣仓140中。分拣仓140可存储由夹持器130释放的所分拣基板110。
30.分拣仓140可各自单独地从分拣单元106中移除。每个分拣仓140可以与分拣单元106可拆卸地连接,诸如,仅举例来说,所述分拣单元106为可单独移除的抽屉或容器、滑出式容器或拉出式抽屉或容器。又举例来说,每个分拣仓140可以从分拣单元106的外部装卸,使得每个分拣仓140可以从分拣单元106移除,而无需进入分拣单元106。被充满的分拣仓140可以从分拣单元106移除,例如将分拣仓140从分拣单元106拉出。各分拣仓140可在分拣单元106分拣基板110的同时从分拣单元106移除。如此,即使特定分拣仓140已满或已被移除,基板110的分拣也可以继续进行。因此,各分拣仓140可在分拣进行的同时被清空或更换。另外,控制器190可以通过使用计数器(图中未示出)来计数每个分拣仓140内的基板110的数量。如此,当特定分拣仓140被充满或不在适当位置时,分拣单元106可跳过已充满或已移除的分拣仓140,直到已充满或移除的分拣仓140被清空或更换。一旦在分拣单元106内已经更换了空的分拣仓140,计数器就可以重置此特定的分拣仓140的计数。每当分拣仓140被更换或清空时,计数器可自动重置。已充满的分拣仓140可以由操作者清空或更换。如此,分拣单元106可继续旋转基板110,直到所指定的分拣仓140可用。如果没有分拣仓140可用,则分拣单元106可以警告操作者并继续旋转基板110,直到适当的分拣仓140变为可用。一旦控制器190确定特定分拣仓140将满或已满,则控制器190可以通过发出警报声和/或显示警报来警告操作者。
31.尽管图中未示出,但是应设想到,额外的分拣仓140可位于分拣单元106内以接收可能从分拣无意中漏掉的基板110,从而防止损伤此类基板。虽然示出了十个分拣仓140,但是应设想到,分拣单元106内可包括比十个更多或更少的分拣仓140,诸如六个、八个、十八个或者二十四个分拣仓140。另外,报废仓(rejection bin)144可以位于分拣单元106内,以捕获已被模块单元104的计量站116a
‑
116e中的一个或多个计量站报废剔除的基板110。如此,旋转分拣系统120可将损坏的基板递送到报废仓144。
32.旋转分拣系统120还可以包括可通过一个或多个访问面板(access panel)访问的成品率(yield)分析服务器146。成品率分析服务器146耦接至前端102和计量站116a
‑
116e中的一个或多个,并且适于接收、收集、分析、存储和/或报告从前端102和每个基板110所经过的一个或多个计量站116a
‑
116e接收的数据。
33.可旋转支撑件122可以与旋转致动器(图中未示出)耦接,所述旋转致动器为诸如气动缸或步进电机。例如旋转致动器以转位(index)方式旋转可旋转支撑件122。在可旋转支撑件122的每次转位步进时,通过输送装置系统114从模块单元104接收新的基板110,然后通过每一夹持器130放置到旋转分拣系统120上。另外,并且如下文进一步论述的,可旋转支撑件122可以在相应的分拣仓140和/或在报废仓144上方对多个臂124中的每一个进行转位,使得基板110可以被释放到分拣仓140或者报废仓144中。通过连续移动或转位步进,可以从输送装置系统114连续地去除基板110,从而立即释放输送装置系统114上的空间以用于下一基板110。如此,这种旋转运动允许每个夹持器130与每个分拣仓140对接,使得在夹持器130旋转回用以接收另一个基板110的位置之前,由夹持器130保持的基板将被释放到一个分拣仓140中。旋转分拣系统120将继续移动,直到所有基板110已经被分拣。
34.在一些实施方式中,旋转分拣系统120可以每隔2/3秒拾取通过输送装置系统114
从模块单元104递送的基板110。在此类实施方式中,旋转分拣系统120可以有利地每小时分拣至少5400个基板,这是相对于常规分拣系统的显著改进。
35.图3示出了与可旋转支撑件122的多个臂124中的一个连接的旋转分拣系统120的至少一个夹持器130的透视仰视图。在图3的实施方式中示出了四个夹持器130;然而,应设想到,可以采用任何数量的夹持器130。如上文所述,在一个实施方式中,每个夹持器130可为伯努利拾取器210。图3的实施方式中示出了四个伯努利拾取器210。每个伯努利拾取器210可以与多个臂124中的每一个可操作地连接,其中一个伯努利拾取器210位于每个臂124的每个边角附近。每个伯努利拾取器210可以从臂124向下延伸,以举升基板110。每个伯努利拾取器210的位置取决于所使用的伯努利拾取器的数量。在一个实施方式中,每个臂124可以仅使用一个伯努利拾取器210,如此可以设想到伯努里拾取器210可以位于每个臂124的中心位置处并靠近每个臂124的第二端128。此外,每个伯努利拾取器210可以设置在所述多个臂124中的每一个的底侧212上,使得每个伯努里拾取器210能够围绕分拣单元106从模块单元104的输送装置系统114传送基板110进入合适的分拣仓140或报废仓144。
36.每个伯努利拾取器210可以适合于需要灵敏搬运(例如基板110的搬运)的举升应用。每个伯努利拾取器210可以操作用于通过在伯努利拾取器210的非接触表面214a和基板110之间施加气流来提供对基板110的软接触传送或非接触传送。来自非接触表面214a的气流可以在基板110的表面上产生真空和举升力。止动件214b可以位于伯努利拾取器的非接触表面214a和基板110之间。止动件214b可以在基板110被分拣时防止所述基板110从伯努利拾取器210滑落或移开。止动件214b可以是可与基板110接触的软表面;然而,止动件214b也可以是非接触表面214a与基板110之间的提供真空和举升力的中间件,诸如用以防止损伤基板110。止动件214b可以是薄材料,诸如可不损坏基板110的材料。止动件214b可防止基板110与伯努利拾取器210的非接触表面214a接触。由于从伯努利拾取器210的非接触表面214a和基板110产生的真空力和连续流动,基板110不直接接触伯努利拾取器210,但可以接触止动件214b,由此使得能够在分拣单元106内安全搬运基板110。使用伯努利拾取器210的优点包括:由于非接触表面214a和基板110的表面之间的空气流动而可无接触地拾取基板110。
37.图4示出了根据一个实施方式的分拣仓140的俯视图。可以类似地解释报废仓144。如上文所述,基于在计量站116a
‑
116e中的一个或多个中所获得的检查数据,将每个基板110分拣到分拣仓140或报废仓144中。成品率分析服务器146分析所接收的检查数据并确定基板110将被分拣到其中的特定分拣仓140或报废仓144。分拣仓140和报废仓144可以是相同的;然而,各自可用于单独和不同的目的。当基板定位至合适的仓上时,旋转分拣系统120可以暂停以拾取新的基板110。在所述停止期间,定位至合适的分拣仓140上方的任何基板110可从相应的夹持器130上被释放,使得所述基板落入分拣仓140中。恰在释放之前,基板110基本上平行于分拣仓,使得基板110在释放时遇到空气枕192或阻力,这减缓了基板110的下落。空气枕192可以为下落的基板110提供阻力,使得基板110平缓地落入分拣仓140中。
38.如图4进一步所示,在某些实施方式中,每个分拣仓140可以任选地包括多个气体出口162。气体出口162被定向成在分拣仓140内提供附加的气体支撑垫160。气体支撑垫160可以允许由夹持器130释放的每个基板110由于泄漏到分拣仓140中的气体(诸如空气)而平缓地落入分拣仓140中,这缓冲了下落并保护基板110免于裂纹、断裂或其他损伤。任选的气
体支撑出口162可以释放加压气体,例如空气、氧气或任何其他合适的加压或非加压气体。气体出口162可以位于每个分拣仓140和/或报废仓144的壁164上。在一个实施方式中,气体可以任选地通过与气体源(图中未示出)连接的供应管线而供给到气体出口162中。在另一个实施方式中,气体可以通过不与分拣仓140直接连接的气体源供给通过气体出口162。气体供给量可以由控制器190控制。
39.图5示出了根据一个实施方式的用于检查和分拣多个基板的方法的流程图500。流程图500开始于操作510,操作510中将基板装载到检查系统100的前端(例如装载模块)中。为了将基板装载到前端中,承载多个供检查的基板的盒可以位于前端(例如检查系统100的前端102)的装载站处。在操作520,将基板传送到检查系统100的模块单元(例如计量模块)中。位于模块单元内的机器人可以从盒中取出基板并将基板放置在输送装置系统(如输送装置系统114)上。当输送装置系统移动通过检查系统100时,输送装置系统114传送基板通过在模块单元104内的沿着输送装置系统114设置的每个计量单元。
40.在操作530,在模块单元104中对基板执行计量。可以用第一计量站(诸如计量站116a)来检查基板。仅举例来说,计量站116a可以是微裂纹检查单元、厚度测量单元、电阻率测量单元、光致发光单元、几何形状检查单元或者锯痕检测单元。计量站116a可以在基板相对于计量站116a移动时对所述基板执行一个或多个操作,然后将检查数据转发给成品率分析服务器146。输送装置系统114可以继续移动基板通过模块单元和容纳在模块单元中的各种其他计量单元,诸如计量站116b
‑
116e。可包括在模块单元104内沿着输送装置系统114的任何数量的计量单元。
41.在操作540,可以基于在各个计量单元内得出的结果或进行的测定,将基板分配到分拣仓。来自各个计量单元的数据和结果可以被发送给成品率分析服务器,所述成品率分析服务器可以包括并分析所述数据和检查结果以确定哪个基板属于哪个分拣仓。为了说明,仅举例来说,如上所述,计量站116a可为微裂纹检查单元。如果计量站116a检查基板并确定基板含有一个或多个微裂纹,则此类数据可被发送给成品率分析服务器。成品率分析服务器可随后确定:由于微裂纹,该特定基板必须被分配到例如分拣仓d。仅出于说明目的,分拣仓d可以是容纳将被重新熔化的基板的分拣仓。
42.在操作550,将基板传送到分拣模块。为了促进传送,基板可以与分拣模块的至少一个夹持器耦接,并且随后绕分拣模块的中心轴旋转,直到到达合适的分拣仓上方的期望位置。合适的分拣仓是基于由成品率分析服务器所测定的并在一个或多个操作510
‑
540中获得的结果和检查数据来选择的。成品率分析服务器146分析所接收的检查数据并确定基板将被分拣到的特定仓。当基板到达合适的分拣仓上方的位置时,可从至少一个夹持器释放基板,使得所述基板可以落入所述分拣仓中。在由至少一个夹持器释放基板之后,随着基板在分拣仓上方被释放,可以用空气枕192支撑基板。空气枕192可防止基板被损伤。在某些实施方式中,基板110可以任选地用气垫支撑。所述气体可以是空气,或者用于支撑基板的任何其他合适的气体。此外,可以将所述气体或空气加压。可以重复操作550,直到在检查系统内检查过的每个基板已经被分拣到合适的仓中为止。
43.所公开的基板分拣系统提供用于基于所接收的计量检查数据来将基板分拣到合适的分拣仓中。所公开的检查系统是可扩展的,并且可以用于在处理基板之前检测各种基板缺陷。所述系统可以使用与至少一个夹持器(诸如伯努利拾取器)耦接的旋转分拣器来对
从计量单元接收的经检查的基板进行分拣。当夹持器拾取每一基板时,来自计量单元的输送装置上的空间立即被空出,从而允许将下一个基板通过输送装置朝向分拣模块传送。在此时间期间,下一个基板沿着输送装置移动,旋转分拣器绕旋转分拣器的旋转轴与所拾取的基板一同步进至下一个位置,并且随后的夹持器就位以接收下一个基板。带有所拾取的基板的旋转分拣器继续绕旋转分拣器的旋转轴步进,直到合适的夹持器已经到达所选分拣仓上方的位置。一旦每个夹持器已经到达所选分拣仓上方的位置,夹持器将释放基板或将基板投放到所述分拣仓中。由于空气枕或者下落的基板和分拣仓之间的空气阻力,基板将平缓地落入分拣仓中。任选地,可以在下落基板下方提供气体(如空气),这可以进一步缓冲基板的下落,从而防止对基板的任何附加损伤。
44.本领域中的技术人员将理解,先前的实例是示例性而非限制性的。在阅读说明书和研究附图后对于本领域中的技术人员来说显而易见的所有置换、改进、等效形式以及修改旨在皆包括在本公开内容的真实精神和范围内。因此以下随附权利要求书旨在包括落入这些教导的真实精神和范围内的所有此类修改、置换和等效形式。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1