TO型光器件的管座与管帽对位封装装置的制作方法
to型光器件的管座与管帽对位封装装置
技术领域
[0001]
本发明涉及一种to型光器件,特别涉及一种基于管帽透镜的对to型光器件的管座与管帽进行准确对位并封装的装置及其封装方法。
背景技术:
[0002]
to型光器件是一种用来进行光电信号转换的光器件,to是transistor outline的缩写,代表同轴型光器件,是指管座与管帽的壳体一般为圆柱形的光器件封装,它由管座与管帽准确对位后,通过通电焊接组成;其中的管座是由管座基座和芯片构成,芯片通过贴片机贴附在管座基座上,在芯片上设置有发光点,在管帽上装配有管帽透镜,管帽与管座对位封装时,要求管帽透镜与芯片上的发光点对正,使芯片上的发光点发出的光能经过管帽透镜发射到光器件外;管帽透镜按理论要求是装配在管帽的中心轴线上,也就是说管帽的中心轴线要与管帽透镜的中心轴线重合,芯片是贴附在管座顶面的中心位置,芯片上的发光点应位于管座的中心轴线上;管座与管帽的对位封装是在封装设备上进行的,具体过程为:将管座放置并吸附在封帽机的下工作台上,将管帽吸附在封帽机的上工作平台上,通过在封帽机上设置的视觉系统,进行管座与管帽的对位,在视觉系统中设置有上、下两台相机,上相机对管帽外轮廓进行定位识别,根据识别到的管帽外轮廓,来确定管帽的中心轴线位置,下相机对管座基座的外轮廓进行定位识别,根据识别到的管座基座的外轮廓,来确定管座的中心轴线位置,封帽机根据上相机识别到的管帽外轮廓的中心轴线与下相机识别到的管座基座的外轮廓中心轴线是否重合,进行对位调整,然后进行封装操作;由于to型光器件的光耦合效率,主要取决于管帽封装过程中管帽透镜中心线与管座芯片上的发光点的重合度,两者重合度越高,光耦合效率就越高,因此,现有的对管帽的外轮廓和管座的外轮廓进行定位识别方法存在以下问题:(1)贴片机将芯片贴附在管座上时,存在贴片误差,不能完全保证芯片的中心轴线与管座的中心轴线完全重合;(2)芯片上的发光点的设置也无法100%保证设置在了芯片的中心位置,也就是说发光点的位置设置也是存在误差的;(3)管帽上的透镜在装配时,由于存在装配误差,有些成品管帽上的透镜中心线是与管帽外轮廓的中心线是不重合的;以上因素直接导致管座与管帽对位封装后,成品的to型光器件的光耦合效率低,影响到了封装后的产品的合格率。
技术实现要素:
[0003]
本发明提供了一种to型光器件的管座与管帽对位封装装置及其对位方法,解决了在to型光器件的管座与管帽的对位封装中如何提高封装产品合格率的技术问题。
[0004]
本发明是通过以下技术方案解决以上技术问题的:
[0005]
本发明的总体构思是:将传统的对管座外轮廓和管帽外轮廓的识别定位,作为管座与管帽对位封装的基准参考,转变为:借助管帽上的透镜,通过视觉系统中的光源,将该光源发出的光线,通过管帽上的透镜照射到管座上的芯片上,得到芯片上发光点的图像,控制器根据芯片上发光点的图像上的位置,通过动态调整管座的位置,使管帽上透镜的中心
轴线与芯片上的发光点对正,从而完成管帽与管座的准确对位,然后将两者进行通电封装在一起。
[0006]
一种to型光器件的管座与管帽对位封装装置,包括底座板、管座和管帽,在底座板的左部前端,固定设置有管座放置吸附台,在底座板的左部后端,固定设置有xyz三方向滑台基座,在底座板的右部,固定设置有倒l形支架,在倒l形支架下方的底座板上,固定设置有视觉系统轨道安装台,在底座板的右端设置有电控器,在管帽上设置有管帽透镜,在管座上设置有芯片,在芯片上设置有发光点,在倒l形支架的顶端的悬臂板上设置有电控气缸,在电控气缸向下伸出的输出轴上,连接有管帽焊接吸附管,管帽焊接吸附管设置在管座放置吸附台的正上方,在管帽焊接吸附管的下端口上,吸附有管帽;在视觉系统轨道安装台上,设置有视觉系统y向移动轨道,在视觉系统y向移动轨道上,设置有视觉系统安装滑块,在视觉系统安装滑块上,设置有视觉系统,视觉系统与电控器电连接在一起;在管座放置吸附台上,活动放置吸附有管座;在xyz三方向滑台基座上,设置有前后方向上的x向滑台,在x向滑台上设置有左右方向上的y向滑台,在y向滑台上设置有上下方向上的z向滑台,在z向滑台上设置有夹具,在夹具中夹持有管座;x向滑台的电控气缸、y向滑台的电控气缸和z向滑台的电控气缸,分别与电控器电连接在一起。
[0007]
在管帽焊接吸附管上设置有反光棱镜,在视觉系统上分别设置有镜头和光源,光源发出的光线,依次通过镜头、反光棱镜和吸附在管帽焊接吸附管下端口上的管帽上的管帽透镜,照射在含有发光点的芯片上,视觉系统对含有发光点的芯片进行成像。
[0008]
在夹具的左夹爪上设置有左夹板,在左夹板上设置有左半圆形夹持槽,在夹具的右夹爪上设置有右夹板,在右夹板上设置有右半圆形夹持槽,在左半圆形夹持槽与右半圆形夹持槽之间夹持有管座;左夹爪与右夹爪的打开及闭合是由夹具电控气缸控制的,夹具电控气缸是与电控器电连接在一起的。
[0009]
一种to型光器件的管座与管帽对位封装装置的对位方法,其特征在于以下步骤:
[0010]
第一步、将管帽吸附在管帽焊接吸附管的下端口上,将管座放置吸附在管座放置吸附台上;
[0011]
第二步、通过电控器控制夹具,将管座夹持在左半圆形夹持槽与右半圆形夹持槽之间;再通过电控器控制电控气缸的向下伸出的输出轴下移,使管帽焊接吸附管上设置的反光棱镜与镜头对齐;
[0012]
第三步、电控器控制视觉系统中的光源发出光线,该光线依次通过镜头、反光棱镜和吸附在管帽焊接吸附管下端口上的管帽上的管帽透镜,照射到在管座放置吸附台上活动吸附的芯片上,含有发光点的芯片的图像经管帽透镜和反光棱镜,成像在视觉系统中;
[0013]
第四步、视觉系统将含有发光点的芯片的图像传送到电控器中,电控器将发光点的位置与管帽透镜的中心轴线的位置进行比较,并根据比较结果,分别通过控制x向滑台的电控气缸、y向滑台的电控气缸和y向滑台的电控气缸,对夹持在夹具中的管座的位置进行调整,使发光点的位置与管帽透镜的中心轴线重合;
[0014]
第五步、管座的位置定位后,电控器控制夹具电控气缸打开对管座的夹持,并控制夹具向后移动,使其离开管座放置吸附台;然后,电控器控制电控气缸的向下伸出的输出轴进一步下移,使管帽焊接吸附管与管座放置吸附台对接,将管帽与管座对接在一起,最后,电控器控制管帽焊接吸附管与管座放置吸附台接通电源,完成管帽与管座的封装。
[0015]
本发明大大提高了管座与管帽封装后的to型光器件的合格率,所封装的to型光器件的光耦合率高。
附图说明
[0016]
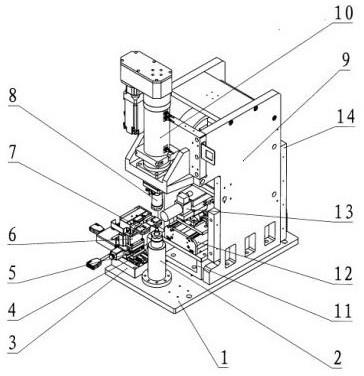
图1是本发明的总体结构示意图;
[0017]
图2是本发明的管座放置吸附台2、夹具7和管座21之间的配合关系图;
[0018]
图3是本发明的管座21、镜头25和管帽24之间的配合关系图;
[0019]
图4是本发明的管帽焊接吸附管8的结构示意图;
[0020]
图5是本发明的管座21的结构示意图;
[0021]
图6是本发明的含有发光点23的芯片22在镜头25中的成像光路图。
具体实施方式
[0022]
下面结合附图对本发明进行详细说明:
[0023]
一种to型光器件的管座与管帽对位封装装置,包括底座板1、管座21和管帽24,在底座板1的左部前端,固定设置有管座放置吸附台2,在底座板1的左部后端,固定设置有xyz三方向滑台基座3,在底座板1的右部,固定设置有倒l形支架9,在倒l形支架9下方的底座板1上,固定设置有视觉系统轨道安装台11,在底座板1的右端设置有电控器14,在管帽24上设置有管帽透镜30,在管座21上设置有芯片22,在芯片22上设置有发光点23,在倒l形支架9的顶端的悬臂板上设置有电控气缸10,在电控气缸10向下伸出的输出轴上,连接有管帽焊接吸附管8,管帽焊接吸附管8设置在管座放置吸附台2的正上方,在管帽焊接吸附管8的下端口上,吸附有管帽24;在视觉系统轨道安装台11上,设置有视觉系统y向移动轨道12,在视觉系统y向移动轨道12上,设置有视觉系统安装滑块27,在视觉系统安装滑块27上,设置有视觉系统13,视觉系统13与电控器14电连接在一起;在管座放置吸附台2上,活动放置吸附有管座21;在xyz三方向滑台基座3上,设置有前后方向上的x向滑台4,在x向滑台4上设置有左右方向上的y向滑台5,在y向滑台5上设置有上下方向上的z向滑台6,在z向滑台6上设置有夹具7,在夹具7中夹持有管座21;x向滑台4的电控气缸、y向滑台5的电控气缸和z向滑台6的电控气缸,分别与电控器14电连接在一起。
[0024]
在管帽焊接吸附管8上设置有反光棱镜28,在视觉系统13上分别设置有镜头25和光源26,光源26发出的光线,依次通过镜头25、反光棱镜28和吸附在管帽焊接吸附管8下端口上的管帽24上的管帽透镜30,照射在含有发光点23的芯片22上,视觉系统13对含有发光点23的芯片22进行成像。
[0025]
在夹具7的左夹爪15上设置有左夹板16,在左夹板16上设置有左半圆形夹持槽17,在夹具7的右夹爪18上设置有右夹板19,在右夹板19上设置有右半圆形夹持槽20,在左半圆形夹持槽17与右半圆形夹持槽20之间夹持有管座21;左夹爪15与右夹爪18的打开及闭合是由夹具电控气缸控制的,夹具电控气缸是与电控器14电连接在一起的。
[0026]
一种to型光器件的管座与管帽对位封装装置的对位方法,其特征在于以下步骤:
[0027]
第一步、将管帽24吸附在管帽焊接吸附管8的下端口上,将管座21放置吸附在管座放置吸附台2上;
[0028]
第二步、通过电控器14控制夹具7,将管座21夹持在左半圆形夹持槽17与右半圆形
夹持槽20之间;再通过电控器14控制电控气缸10的向下伸出的输出轴下移,使管帽焊接吸附管8上设置的反光棱镜28与镜头25对齐;
[0029]
第三步、电控器14控制视觉系统13中的光源26发出光线,该光线依次通过镜头25、反光棱镜28和吸附在管帽焊接吸附管8下端口上的管帽24上的管帽透镜30,照射到在管座放置吸附台2上活动吸附的芯片22上,含有发光点23的芯片22的图像经管帽透镜30和反光棱镜28,成像在视觉系统13中;
[0030]
第四步、视觉系统13将含有发光点23的芯片22的图像传送到电控器14中,电控器14将发光点23的位置与管帽透镜30的中心轴线的位置进行比较,并根据比较结果,分别通过控制x向滑台4的电控气缸、y向滑台5的电控气缸和y向滑台5的电控气缸,对夹持在夹具7中的管座21的位置进行调整,使发光点23的位置与管帽透镜30的中心轴线重合;
[0031]
第五步、管座21的位置定位后,电控器14控制夹具电控气缸打开对管座21的夹持,并控制夹具7向后移动,使其离开管座放置吸附台2;然后,电控器14控制电控气缸10的向下伸出的输出轴进一步下移,使管帽焊接吸附管8与管座放置吸附台2对接,将管帽24与管座21对接在一起,最后,电控器14控制管帽焊接吸附管8与管座放置吸附台2接通电源,完成管帽24与管座21的封装。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1