具有锁定装置的切割端子装置的制作方法
1.本实用新型涉及一种根据本实用新型的具有锁定装置的切割端子装置。在此,该切割端子装置被构造用于连接导线而不用事先剥除绝缘皮,并且具有至少一个操纵元件,利用该操纵元件可通过预设的运动将电导线压入切割元件中,由此切断导线的绝缘部并且将导线与切割元件电连接。
背景技术:
2.在电气接线或连接技术中,为了连接绝缘的、未预处理的导线,通常使用此种切割端子。在此,导线的芯线与绝缘部一起被压入到切割端子中。通过锋利的切割端子切断绝缘部并且在切割端子和芯线之间建立电连接。为了将导线压入此种切割端子中,通常在切割端子装置上使用专门的构件,其中该构件容纳导线并且通过构件的直线移动或绕摆动轴线的摆动将导线压入切割端子中。
3.例如de 198 35 459 c2公开了一种这样的用于连接导线而不用去除绝缘部的电端子。该端子具有切割元件和带有导线容纳部的操纵滑动件。如果导线被推动穿过导线容纳部并且操纵滑动件朝向切割元件的方向运动,则导线由此被压入切割元件中并且绝缘部因此被切断以用于与切割端子电接触。切割端子又电连接到端子的汇流条。
4.de 33 00 697 c2同样公开了一种按照切割端子原理的电端子,其中两个携动体可摆动地支承在端子上。通过摆动一个这种携动体,导线可被压入切割端子中。在该位置中,携动体可以通过锁止元件的移位被固定,其中,锁止元件例如是把手,该把手借助铰链销可摆动地支承在端子上。为了松开锁止元件,将把手再次沿相反的方向摆动并且由此释放相应的携动体。
5.下文中也将切割端子装置以英文称为“insulation piercing displacement connector(ipdc)”。ipdc在此通常被用作可重复使用的装置,例如,在de 33 00 697 c2所述的端子的情况下。携动体的锁定可手动地松开并且携动体因此可容易地被移动,以便将导线从切割端子松开。然而在实践中部分地存在对于切割端子装置的需求,在所述切割端子装置中仅能够实现一次接线。例如,当应防止手动地、无意地或有意地操纵连接处时,确保一次性的接线是必要的。特别是,如果连接处的接线应只通过机器人进行,则这可能是需要的。这样的连接处则被设计为不可重复使用的ipdc,从而在去除导线时其被自动破坏,即为了去除导线,需要可见地损坏端子。不可更换的 ipdc被设计为,使得该ipdc仅通过将导线与电流回路分离而被分离。
技术实现要素:
6.因此,本实用新型的目的在于,提供一种用于一次性接线的切割端子装置,其可用作不可重复使用的ipdc。
7.该目的通过根据本实用新型的切割端子装置实现。所述切割端子装置的有利的改进方案由说明书中获得。
8.根据本实用新型的切割端子装置用于在没有事先剥除绝缘皮的条件下连接导线。导线是具有至少一个芯线的电导线,该芯线由绝缘部包围。在此,所述切割端子装置具有壳体,该壳体尤其构造为由塑料制成的绝缘壳体。该壳体容纳该切割端子装置的不同部件,根据本实用新型,所述部件包括至少一个切割元件和至少一个具有导线容纳部的操纵元件,在操纵元件的容纳位置中,导线能够插入到该导线容纳部中。在壳体中优选容纳一个切割元件和一个对应的操纵元件,但是壳体也可以根据设计方案和应用情况容纳多个切割元件和分别对应的操纵元件。
9.切割元件优选通过具有两个彼此间隔开的切割棱边的金属刀具形成,导线能够压至切割棱边之间。两个切割棱边彼此的距离使得在压入时导线的绝缘部被切穿并且位于其中的芯线由两个切割棱边电接触。如此形成的切割元件与汇流条电连接,该汇流条同样容纳在壳体中。
10.在操纵元件中,导线容纳部例如通过具有两个端侧开口的开口或长形通道构成。在操作该切割端子装置时,导线被插入到该导线容纳部中,直到它相对于切割元件位于一个预定的位置。至少一个操纵元件可运动地支承在壳体上,其中,该操纵元件可在容纳位置和切割位置之间运动。在容纳位置中,操纵元件的位置使得导线如所描述的那样能够引入到导线容纳部中。在操纵元件从该容纳位置到切割位置的预定运动期间,操纵元件将引入其中的导线推动到切割元件中,由此导线的绝缘部被切穿并且导线与切割元件电连接。因此,操纵元件携动导线并且因此也可以被称为携动元件。
11.根据本实用新型,在壳体和操纵元件之间构造锁定装置,该锁定装置通过操纵元件从容纳位置到切割位置的移动而自动锁定。在此,该锁定阻止操纵元件从切割位置向容纳位置的方向运动。在将导线连接到切割端子装置上之后,由此确保了所述导线不能轻易地通过将操纵元件再次从切割位置移动到容纳位置而被再次移除。因此,利用根据本实用新型的切割端子装置仅能够实现连接处的一次接线。在此,锁定不通过锁定元件的能够与导线的连接无关地再次回置的额外的运动来进行,而是所述锁定自主地通过操纵元件的运动来进行。相反,在连接导线时通过操纵元件的运动自动地实现锁定,并且因此也不能避开该锁定。如果导线导电地连接在切割元件上,则总是也实现了操纵元件在该位置中的锁定,由此能够以有效的方式提供不可重复使用的ipdc。
12.尤其规定,通过操纵元件从容纳位置运动到切割位置,至少两个锁定元件这样相对彼此定向,使得它们最晚在操纵元件的切割位置中相互锁定或卡锁。优选地,第一锁定元件位于操纵元件上,而第二锁定元件位于壳体上。这提供了一种简单且有效的锁定方式。然而,操纵元件的移动也可以间接地触发一个或多个锁定元件的移动。例如,操纵元件的移动可以导致一个或多个锁定栓枢转。
13.如果试图将操纵元件连同导线未经授权地再次移回到容纳位置中,则这在本实用新型的一个实施方式中只能通过损坏切割端子装置来实现。这种损坏典型地在操纵元件和/或壳体上出现并且因此从外部可见。
14.本实用新型可以用于不同类型的操纵元件,其中,形式、操纵的类型以及尤其是相对于切割端子装置的壳体的相对运动的类型可以不同。例如,操纵元件可相对于壳体直线推移,从而操纵元件是滑动件,所述滑动件用作操纵滑块。滑动件在壳体内部被引导,其中它在容纳位置和切割位置之间被直线引导。这例如通过滑动件或壳体上的运行槽和运行肋
实现。在此,可以在相应的切割端子装置的壳体的内侧上构造运行肋和/或运行槽。然而,通常多个切割端子装置紧密地并排安装在接线盒设备中。在这种串联结构中,为了直线地导引第一切割端子装置的滑动件,也可以使用相邻的第二切割端子装置的壳体,在该壳体外侧上则设置有运行肋和/或运行槽。在这种实施方式中,壳体具有一个侧壁,所述侧壁具有位于内部的和位于外部的运行肋和/或运行槽。滑动件在该壳体壁与相邻的切割端子装置的壳体壁之间引导。
15.此外可以规定,滑动件在容纳位置可松开地保持在壳体上,这例如通过滑动件与壳体之间的卡锁连接实现。然而,当将使滑动件朝向切割位置方向运动的力施加到滑动件上时,该卡锁是可容易克服的。
16.在一个替代的实施方式中,操纵元件能够围绕摆动轴旋转,从而该操纵元件是翻转杠杆。在该实施形式中,同样可设置有翻转杠杆相对于壳体的引导和翻转杠杆与壳体在容纳位置中的卡锁,其中,在翻转杠杆具有通过摆动轴的支承的情况下不一定需要这些措施。
17.对于操纵元件,相对于壳体的相对运动例如可以通过可操纵的杠杆或一个或多个开口引起,工具被引入到所述开口中并且随后沿操纵方向运动。特别地,操纵元件上可以设置有用于由机器人操纵的装置,以便实现由机器人进行自动布线。
18.锁定装置也可以以不同的方式构成。例如,锁定装置可以通过可摆动的闩形成,该闩通过操纵元件到切割位置的运动而自动地转换到锁定位置中。这例如通过弹力引起,所述弹力施加在闩上并且通过操纵元件的运动释放闩的运动。这同样可以例如通过在弹力下可直线移动的销或其它合适的部件来实现。
19.在本实用新型的优选实施例中,第一锁定元件在操纵元件从容纳位置移动到切割位置时在弹力下沿着表面滑动,并且在达到切割位置时通过该弹力与第二锁定元件锁止。第一和第二锁定元件分别形成在壳体或操纵元件上。弹力通过单独的弹簧元件和/或锁定元件自身的弹性变形而产生,这导致弹簧应力。在此,锁定元件在操纵元件的容纳位置中已经在弹簧应力条件下贴靠在表面上,或者弹簧应力在操纵元件运动到切割位置中时才产生,例如通过使锁定元件在该运动时弹性变形。
20.此外,第一锁定元件和第二锁定元件一体地或者作为单独的构件构造在壳体和/或操纵元件上。因此,锁定元件一件式地成型在操纵元件或壳体上,或者锁定元件是固定到相应元件上的单独的构件。例如,第一锁定元件和第二锁定元件构造为舌片、突出部、开口、狭缝、钩、闩、销、角度件或凹处,其中,所述列举不应视为最终的,而是能够使用锁定元件的任意适合的形状。
21.在本实用新型的一个实施例中,锁定元件例如设计为壳体上的锁止舌片,当滑动件移动到切割位置时,该锁止舌片可靠地与滑动件上的突出部卡锁。为此,舌片首先弹性变形,以便产生弹簧应力,舌片然后利用该弹簧应力与突出部卡锁。舌片的这种变形例如可以通过引入导线或通过移动滑动件来引起。
22.为了可靠地确保切割端子装置的仅仅一次的接线,在本实用新型的一种实施方式中规定,壳体在操纵元件的切割位置中遮蔽锁定装置,由此锁定装置不能从壳体的外部触及并且松开。在锁定的切割位置上,锁定装置则不能通过手动干预再次松开。操纵元件仅能够通过暴力的措施被移动,这在这样的操作之后是可见的。在一种替代的实施形式中规定,
当相邻的切割端子装置并排安装为接线盒设备时,锁定装置不被壳体遮蔽,然而被相邻的切割端子装置遮蔽。因此,在接线盒设备中也不能容易地看到和实现向锁定装置的触及。
23.然而,例如为了测试目的可能需要的是,在接线之后也再次松开该切割端子装置。这则是经授权的操纵,然而所述操纵优选如此设计,使得对于未经告知的使用者来说不能容易地识别出该操纵的方案。例如通过特殊的开口实现锁定装置的松开,通过该开口可触及锁定装置。通过该开口,至少一个锁定元件是可触及的并且可以被移动。例如,细长工具可以被引导通过这种开口,以便在壳体内部将锁定元件移动脱离卡锁,从而解除锁定。特别地,锁定元件的移动是逆着弹力进行的,该弹力先前将锁定元件移动到锁定位置。
24.这种解锁开口例如设置在壳体中。在一个替代的实施方式中规定,通过操纵元件中的解锁开口,尤其是只有通过操纵元件中的解锁开口,可以从壳体外部触及和松开锁定装置。为了在操纵元件中不过于明显地设计这样的解锁开口,优选地设置成,解锁开口同时构造成用于引入工具的开口,利用该工具能够使操纵元件从容纳位置运动到切割位置中。例如,解锁开口同时形成为用于机器人销的销孔,操纵元件可借助该机器人销从容纳位置自动地移动到切割位置。这具有的优点是,不能轻易地识别解锁开口。因此,根据本实用新型的切割端子装置的外观可以对应于没有锁定装置的切割端子装置。那么,通过本来就存在的开口可松开该锁定装置,然而其中,这仅对于该切割端子装置的被告知的使用者是已知的。
25.在本实用新型的一个实施方式中,解锁开口的通道被设计成比用于操纵元件的操纵的其余开口更长。此外,通道优选地朝向锁定装置逐渐变细。因此,锁定需要使用长而薄的工具。
26.在本实用新型的一个实施方式中,解锁开口作为通道平行于操纵元件中的导线容纳部延伸。这例如也适用于使操纵元件运动的开口。如果使用滑动件作为操纵元件,则例如可以在端面上设置通道形式的中央的导线容纳部。在该导线容纳部的相对置的多侧上,在端面上分别设置了具有开口的另外的通道。这些通道通过引入工具或机器人销用于使滑动件运动到切割位置中,其中,至少一个通道也用作解锁开口,通过该解锁开口可触及随后的锁定装置。
27.在本实用新型的另一实施方式中,第一锁定元件和/或第二锁定元件具有预设断裂部位。如果试图在第一次接线之后未经授权地再次从切割位置松开操纵元件,则锁定装置的锁定元件在预设断裂部位处断裂。为此,预设断裂部位相应地布置和设计。优选地,附加地规定,预设断裂部位的断裂在操作之后能从外部识别出。因此,锁定元件和预设断裂部位如此布置,使得预设断裂部位在操纵元件移出切割位置之后从壳体外部可见并且不被壳体遮蔽。尤其规定,预设断裂部位至少在操纵元件的容纳位置中从壳体外部是可见的。如果试图使操纵元件在第一次接线之后重新运动回到容纳位置,则锁定装置的锁定元件在预设断裂部位处断裂。在随后到达的容纳位置中,该部位从外面可以看到,从而可以确定,在第一次接线之后该切割端子装置未经授权地被操作。该实施例可以与用于通过解锁开口授权地松开锁定装置的方案结合。但是,它也可以用作独立的检测方案。
附图说明
28.本实用新型的其它优点、特点和有利的改进方案由说明书和以下借助附图对优选
实施例的描述得出。
29.图1示出了带有多个切割端子装置的接线盒设备的一种实施方式;
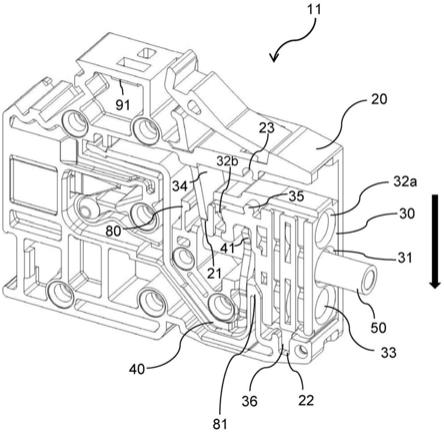
30.图2示出了根据本实用新型的切割端子装置的第一实施方式的从第一侧观察的三维视图;
31.图3示出了根据图2的切割端子装置的从第二侧观察的三维视图;
32.图4示出了根据图2的切割端子装置的侧视图;
33.图5示出了两个相邻的根据图2的切割端子装置的前视图;
34.图6示出了根据图2的、具有所连接的导线和锁定装置的切割端子装置的三维视图;
35.图7示出了根据图6的锁定装置的细节图;
36.图8示出了锁定装置的第二实施方式的细节图;
37.图9示出了锁定装置的第三实施方式的细节图;
38.图10示出了锁定装置的第四实施方式的细节图;
39.图11示出了锁定装置的第五实施方式的细节图;
40.图12示出了锁定装置的第六实施方式的细节图;
41.图13示出了根据图12的锁定装置的放大细节图。
具体实施方式
42.图1示例性地示出了带有多个切割端子装置的接线盒设备10的一种实施方式,其中的两个切割端子装置示例性地用附图标记11和 12标示。所述切割端子装置11、12被并排设置在安装板14上,该安装板包含支承导轨,所述切割端子装置被安装在该支承导轨上。此外,在切割端子装置的一侧设有端部保持器13。
43.每个切割端子装置11、12可以如下面所描述的那样实施并且主要具有壳体和可直线移动地支承在壳体中的滑动件。因此,滑动件可以从容纳位置运动到切割位置,在容纳位置,导线可以引入滑动件中的导线容纳部内,在切割位置,导线被压入端子的切割元件中。此外,在滑动件上构造了用于滑动件运动的开口,所述开口尤其可以用作用于机器人销的销孔,以便能够通过机器人给多个切割端子装置接线。图1示出了位于切割端子装置12上的例如中间的导线容纳部31和两个机器人销孔32a和33。
44.图2从第一侧面示出了根据本实用新型的切割端子装置的第一实施方式的三维视图,而图3则示出了对置的侧面。图4示出了侧视图。借助于这些附图和以下描述来解释根据本实用新型的切割端子装置的工作原理,但是其中尤其所述装置的壳体20以及其它的部件的设计方案仅仅应该视为可能的实例。这尤其适用于切割端子装置与支承导轨的连接以及相邻的切割端子装置的连接。此外,附图示出了具有可直线移动的滑动件的切割端子装置,但是各个锁定和解锁特征也可以应用于具有可枢转的翻转杠杆形式的操纵元件的切割端子装置。
45.切割端子装置11具有壳体20,该壳体容纳多个构件并且被构造用于直线地引导滑动件。所述构件包括具有两个切割棱边的切割元件 41。切割元件41与切割端子装置11的汇流条40电连接。滑动件具有导线容纳部31用于插入导线。如果滑动件与导线一起向切割元件 41的方向运动,则切割元件41将滑动件的绝缘件分开并且以其两个切割棱边接触导线
的位于内部的芯线。在此,滑动件直线地从容纳位置运动到切割位置中。图2到图4示出了在一种状态中的切割端子装置11,在该状态中没有导线被引入并且滑动件处于所述容纳位置中,该容纳位置对于滑动件来说是初始位置。在该初始位置中,滑动件借助于锁定球35固定在壳体20上,壳体为此具有相应的球容纳部23。导线容纳部31位于滑动件的端面上,该端面从壳体20的外部可见并且可触及。在所述导线容纳部31上方和下方分别设置有开口。在本实施例中,这些开口用作用于自动操纵滑动件的机器人销孔。然而,开口也可以用于手动地移动滑动件,例如使用螺丝刀。在此,下部开口33是单纯的机器人销孔,而上部开口32a除了机器人销孔的功能以外,也可以作为解锁开口使用。
46.为此,上部开口32a的邻接的通道被实施为比开口31和33的通道更长。此外,解锁开口的横截面朝向壳体20的内部逐渐变细。在滑动件的端侧上,开口32a的第一区段具有比在更深入壳体的第二区段更大的横截面(参见图5)。该第二区段优选地被实施为从开口 32a的通道的穿孔32b。因此,为了解锁,需要具有小直径的长的工具,所述工具可以被引导穿过在解锁开口的端部处的穿孔32b。
47.滑动件可在壳体20中的空缺内运动,其中在滑动件的初始位置中在滑动件的底侧与壳体之间产生空腔。在该底侧的区域中,滑动件可选地具有肋,其在操纵滑动件时插入到壳体20中的槽内。如果在将导线压入切割元件41中时相应的力作用到滑动件上,则这防止了滑动件的旋转或翻转。
48.壳体20中的用于滑动件的空缺在侧面由侧壁限定,在侧壁的内侧上构造有多个运行肋。图2和图4示出了两个位于内部的运行肋 26i和24i,其中运行肋24i在其下端部处具有止动凸耳71。从图3 的视图中可以得知,在壳体侧壁的外侧上存在三个运行肋24a、25a 和26a,其中运行肋25a在下端部上具有止动凸耳70。这些运行肋用于引导滑动件,该滑动件为此具有对应的运行槽,其中的两个运行槽在图2和图4中用附图标记72和73表示。如果多个切割端子装置并排装配,那么滑动件的运行槽通过各自壳体内侧上的运行肋和相邻壳体外侧上的运行肋引导。通过该导向装置保证了滑动件的直线操纵。
49.图5示出了两个并排安装的切割端子装置11和12的前视图,其中具有穿过其相应的滑动件的剖面。该剖面穿过每个滑动件的导线容纳部31、31
′
以及其解锁开口的位于内部的区段延伸,其中,示出了解锁开口的后方的较窄的区域32b、32b
′
。每个切割端子装置11、 12具有各自的壳体20、20
′
,但是所述壳体为了引导相应的滑动件而与相邻的切割端子装置的壳体共同作用。这借助于切割端子装置12 的滑动件可见。其运行槽在图5中在左侧通过切割端子装置11的壳体20外侧上的运行肋和通过在其各自壳体20
′
内侧上的运行肋引导。为此,从图5的视图中例如可见位于外部的运行肋24a和位于内部的运行肋24i
′
。
50.每个这些运行肋24a、24i、24i
′
在下端部处具有止动凸耳70、 70
′
,该止动凸耳可以用于在接线之后固定相应的滑动件。然而,根据本实用新型的锁定优选地以不同的方式进行,以下将描述这些方式中的可能的实施方式。在第一实施方式中,滑动件在位于壳体20中的一侧上具有止动凸耳形式的锁定元件34。该止动凸耳34形成一种突出部,壳体20的舌片21可与该突出部卡锁以用于锁定。舌片21 伸入到壳体20的内部并且构成锁止舌片。它朝向滑动件延伸,确切地说,相对于滑动件的运动方向倾斜一个角度。该角度小于90
°
并且例如在40
°
与20
°
之间。在滑动件的初始位置上,止动凸耳34 贴靠在舌片21上。这例如通过在止动凸耳34上的斜面实现,该斜面贴靠在舌片21上。在此,止动凸耳34和舌片21相对彼此布
置成,使得当操纵滑动件时,止动凸耳34首先推开舌片21。在此,舌片21 弹性变形并且因此在弹簧应力下贴靠在止动凸耳34上。一旦到达舌片21的端部,舌片21则可以通过弹簧力再次移动回到其初始位置,或者至少几乎回到其初始位置,从而其与突出部34卡锁。在该位置中,舌片21阻止滑动件返回其初始位置的运动,因为舌片21支撑在止动凸耳34的突出部上。
51.图6示出了在锁定位置中的滑动件。导线50已被插入导线容纳部31中并且滑动件通过开口33和32a向下向切割元件41的方向推动,如通过沿操纵方向的箭头所示。在此,锁定球35已经从球容纳部23中松开。在滑动件底侧上的肋36容纳在壳体20的槽22中,并且导线从上方被压入到切割元件41的两个切割棱边之间。由此,导线50的芯线与切割元件41并且进而与汇流条40电接触。
52.舌片21这样与止动凸耳34卡锁,使得它阻止滑动件返回其初始位置的运动。这种类型的锁定不容易从壳体20的外部看到。如果需要,可以通过将细长的工具插入滑动件中的开口32a中来解除该锁定。较窄的穿孔32b连接在该开口32a的通道上,该穿孔允许长的工具进入直到舌片21。通过压舌片21,该舌片被从滑动件并且进而从止动凸耳24推开,由此解除锁定。因此,滑动件可以再次移动到其初始位置,其中导线50再次被带动并且从切割元件41松开。舌片 21也返回到其初始位置。图7示出了锁定装置的放大细节图,并且用箭头示出了作用到用于解锁的舌片21上的力。
53.在一个替代实施方式中或作为补充规定,在将导线50引入导线容纳部31中时,首先通过导线将舌片21压抵止挡80。这个过程借助图4可见,在图4中虚线示出待引入的导线50。这样,舌片21变形并且当操纵滑动件时,舌片可以通过如此产生的弹力与止动凸耳 34卡锁。
54.如果滑动件相对于壳体锁定,则在不知道通过开口32a的解锁方案的情况下,滑动件不能移动到其初始位置。这只能通过使滑动件和/或壳体变形来实现,这在进行这种未经授权的操作之后是可识别的。然而,不是必须提供解锁方案,本实用新型还包括不具有解锁方案的独立锁定。因此,在上述实施方式中,也可以不将开口32a设为解锁开口。
55.图8示出了锁定装置的第二实施方式的细节图,其中,切割端子装置的部件可以类似于所描述的那样实施。为了将滑动件锁定在切割位置中,在滑动件上设置有倾斜伸出的呈角度元件60形式的舌片,所述角度元件作为单独的构件固定在滑动件上。角度元件60侧向地位于滑动件上。为了将滑动件锁定在切割位置,该锁定元件60因此与自身壳体20的侧壁上或相邻的切割端子装置的壳体的侧壁上的对应的锁定元件配合。
56.图9重新借助两个相邻的切割端子装置的细节视图示出与壳体侧壁上的锁定元件的这种配合。在该实施方式中,滑动件在其右侧上具有倾斜向上伸出的角度元件60。滑动件处于初始位置,并且在该位置中,角度元件60的臂位于壳体20内侧上的凹处27中。相邻的壳体20
′
的侧壁也具有这种凹处27
′
用于另一个滑动件(未示出)。如果现在操纵滑动件并且使其向下运动,那么角度元件60在壳体壁的压力下变形,从而其处于弹簧应力下。在到达滑动件的切割位置时,角度元件60到达壳体壁中的第二凹处28,角度元件由于弹力卡锁到该第二凹处中。相邻的壳体20
′
也具有此种凹处28
′
用于另一滑动件 (未示出)。利用这种锁定,滑动件无法重新向上运动到其初始位置中,因为处于凹处28中的角度元件60阻止该运动。该锁定也无法未经授权地松开,因为角度元件60通过壳体20屏蔽并且因此无法触及。角度元件60也不能从滑动件的端面触及,而是更深地处于壳体中。
57.在本实用新型的一个替代的实施方式中,角度元件60也可从外部触及,从而角度元件60为了解锁可被从凹处中压出。当切割端子装置例如从接线盒设备拆除时,这可以通过滑动件的端面实现或者从侧面实现。
58.例如,图10示出了锁定装置的第四实施例的细节图,其中,在滑动件上再次使用侧面的锁定元件60,该侧面的锁定元件60在滑动件的初始位置位于壳体20的侧壁中的狭缝61中。这在图11中示出。如果操纵滑动件并且使其向下运动,那么角度元件60在壳体壁的压力下变形,从而其处于弹簧应力下。在到达滑动件的切割位置时,角度元件60到达壳体壁中的开口62,角度元件由于弹力卡锁到该开口中。
59.图12示出了可能的锁定装置的另一种实施方式的细节图,其中在滑动件的底侧上构造钩形式的止动凸耳63。壳体20在该区域中具有对应的凹处64。如果滑动件运动到切割位置,则止动凸耳63略微屈服,直至其可与凹处64锁止。因此,滑动件不能再次运动到其初始位置中。图13示出根据图12的锁定装置的放大细节图。
60.在所有的锁定装置中可以规定,锁定元件设有预设断裂部位。在未经授权地操纵切割端子装置的滑动件时,所述锁定元件在该预设断裂部位处断裂并且优选规定,该断裂紧接着从外面可以识别出来。因此尤其是,预设断裂部位的位置被选择为,使其在滑动件的初始位置中从外部可见。如果例如在图12实施方式的止动凸耳63上设置有预设断裂部位,则当滑动件被暴力移回其初始位置时,所述钩折断。断开的止动凸耳63从外部可见,这随后可以推断出切割端子装置的未经授权的操作。
61.此外,在一种可选的实施方式中规定,切割端子装置具有用于所连接的导线的拉力卸载装置。这种拉力卸载装置优选通过壳体的设计实现,该壳体例如构造多个接片,导线受拉时保持在接片之间。这种拉力卸载装置的可能的实施方式借助附图描述。例如,切割端子装置11的壳体20具有壳体中间壁81,该壳体中间壁伸入到壳体20中。该壳体中间壁81基本上平行于切割元件41延伸并且与导线容纳部 31成90
°
的角度(参见例如图2)。壳体中间壁81形成第一接片82i,其邻接壳体侧壁的内侧。这尤其可从图9中看出,该图针对左边的切割端子装置示出了带有接片82i的壳体中间壁81。在壳体侧壁的外侧上构造有另一接片82a,如其例如在图3中可见。在组装两个相邻的切割端子装置时,各两个接片形成漏斗,该漏斗朝导线容纳部31 扩宽。为此,接片相应地实施有倾斜延伸的棱边。由两个接片组成的漏斗于是位于切割元件41和滑动件之间。
62.图5示出两个相邻的切割端子装置的组装,其中,切割端子装置11的外部的接片82a与切割端子装置12的内部的接片82i
′
共同形成漏斗。还可以看到另外的接片82i和82a
′
,这些接片与另外的连接的切割端子装置分别形成另外的漏斗。如果导线50被引入滑动件的导线容纳部31中并且滑动件被操纵,则通过切割元件41切断导线50的绝缘部。同时,绝缘部在切割元件41和滑动件之间的区域中被压入由两个锥形相向的接片组成的漏斗中,并且在那以该方式在拉导线50时得以保持。两个接片之间的间距相应地选择并且与绝缘部的外直径相匹配。因此,通过两个接合在一起的切割端子装置11、 12的壳体可以实现简单的拉力卸载。
63.为了实现连接,两个切割端子装置的壳体优选相互卡锁。这通过壳体上的分别对应的卡锁元件实现,其中,在附图的实施方式中示例性地使用卡锁元件90和91。
64.附图标记说明
65.接线盒设备
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
10
66.切割端子装置
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
11、12
67.端部保持器
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
13
68.安装板,支承导轨
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
14
69.壳体
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
20、20
′
70.舌片、锁止舌片
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
21
71.槽
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
22
72.球容纳部
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
23
73.运行肋、内部的
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
24i、24i
′
、26i
74.运行肋、外部的
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
24a、25a、26a
75.凹处
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
27、27
′
、28、28
′
76.操纵元件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
30、30
′
77.导线容纳部
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
31、31
′
78.解锁开口、机器人销孔
ꢀꢀꢀꢀꢀꢀ
32a
79.穿孔
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
32b
80.开口、机器人销孔
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
33
81.止动凸耳、突出部
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
34
82.锁定球
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
35
83.肋
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
36
84.汇流条
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
40
85.切割元件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
41、41
′
86.导线
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
50
87.角度元件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
60
88.狭缝
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
61
89.开口
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
62
90.止动凸耳
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
63
91.凹处
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
64
92.止动凸耳
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
70、70
′
、71
93.运行槽
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
72,73
94.止挡
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
80
95.壳体中间壁
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
81、81
′
96.接片、内部的
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
82i、82i
′
97.接片、外部的
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
82a、82a
′
98.卡锁元件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
90、91。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1