一种具有多轴联动机械手的晶圆自动传输装置的制作方法
1.本实用新型涉及晶圆加工装置技术领域,具体为一种具有多轴联动机械手的晶圆自动传输装置。
背景技术:
2.晶圆是指制作硅半导体集成电路所用的硅晶片,其原始材料是硅,由于其形状为圆形,故称为晶圆。二氧化硅矿石经由电弧炉提炼,盐酸氯化,并经蒸馏后,制成了高纯度的多晶硅,其纯度高达99.999999999%。晶圆制造厂再将此多晶硅熔解,再于溶液内掺入一小粒的硅晶体晶种,然后将其慢慢拉出,以形成圆柱状的单晶硅晶棒,由于硅晶棒是由一颗小晶粒在融熔态的硅原料中逐渐生成,此过程称为“长晶”。硅晶棒再经过研磨,抛光,切片后,即成为集成电路工厂的基本原料——硅晶圆片,这就是“晶圆”。简单的说,单晶硅圆片由普通硅砂拉制提炼,经过溶解、提纯、蒸馏一系列措施制成单晶硅棒,单晶硅棒经过抛光、切片之后,就成为了晶圆。晶圆经多次光罩处理,其中每一次的步骤包括感光剂途布、曝光、显影、腐蚀、渗透或蒸煮等等,制成具有多层线路与元件的ic晶圆,再交由后段的测试、切割、封装厂,以制成实体的集成电路成品。
3.晶圆在生产加工过程中,非常容易受到环境中粉尘的污染,小到几十纳米的微小颗粒,大到几百微米的灰尘,自于生产加工中晶圆表面的灰尘、空气纯净度未到达标准以及加工过程中化学试剂等。这些颗粒在光刻时会遮挡光线,造成集成电路结构上的缺陷,污染物可能会附着在晶圆表面,造成图案的不完整,直接影响芯片的电气特性,因此通常通过smif(标准机械界面)隔离技术,使晶圆可以在对外界环境要求相对较低的情况下,保障晶圆自动上下料过程中的洁净。
4.如中国发明专利公开号cn101459100b公布了一种紧凑式晶圆自动传输装置,包括机架、上料平台、风箱体和手臂机构,手臂机构的升降、伸展电机不在一个平面上,下手臂通过平移机构和翻转机构连接抓取机构,并利用齿轮连杆传动机构驱动抓取机构绕轴线转动,抓取机构的抓取电机驱动夹爪往复移动,抓取机构上的定位机构设置可调定位块。
5.如中国发明专利公开号cn101459101b公布了一种翻转式晶圆自动传输装置,包括机架、上料平台、风箱体和手臂机构,手臂机构的下手臂通过翻转机构连接抓取机构,抓取机构的固定板通过翻转轴铰接在翻转基座上,抓取机构的抓取电机通过涡轮蜗杆驱动抓取连杆带动夹爪沿抓取滑轨往复移动,抓取机构上的定位机构设置可调定位块。
6.如中国发明专利公开号cn101465308b公布了一种旋转型晶圆自动传输装置,包括机架、上料平台、风箱体和手臂机构,手臂机构的抓取机构利用组装在下手臂固定座内的大、小带轮组成的传动机构绕轴转动,设置在抓取机构的抓取电机通过蜗轮蜗杆驱动抓取连杆带动夹爪沿抓取滑轨往复移动,抓取机构上的定位机构设置可调定位块。
7.如中国发明专利公开号cn101465309公布了一种平移翻转式晶圆自动传输装置,包括机架、上料平台、风箱体和手臂机构,手臂机构的下手臂通过组装在一起的平移机构和翻转机构连接抓取机构,并利用组装齿轮连杆传动机构驱动抓取机构绕轴线转动,抓取机
构的抓取电机驱动夹爪往复移动,抓取机构上的定位机构设置可调定位块。
8.但是在实际使用中发现,上述对比文件中的技术方案均存在缺陷,如对比文件一中的技术方案,仅可在有限行程空间内完成晶圆水平或垂直状态的自动传输,同时实现晶圆匣左右平移和翻转;又如对比文件三中的技术方案,仅仅是在完成晶圆自动传输的同时,实现晶圆匣随意旋转和180度反向置放。
9.在上述技术方案中,机械手运动范围较小,导致单台上料设备无法兼容不同的加工机型,而针对每一个加工机型,又需要配置不同款式的定制版上料设备,这就导致了企业成本的急剧上升,因此有必要针对以上问题进行改良。
技术实现要素:
10.本实用新型的目的在于提供一种具有多轴联动机械手的晶圆自动传输装置,具备适用性强的优点,解决了以上背景技术中提出的问题。
11.为实现上述目的,本实用新型提供如下技术方案:一种具有多轴联动机械手的晶圆自动传输装置,包括机架;固定安装在机架内的机械手传动机构和风箱传动机构;与机械手传动机构传动连接的机械手机构,所述机械手机构通过数个机械手传动组件联动形成多轴联动机械手,且机械手机构上设置有夹持机构;与风箱传动机构传动连接的风箱机构,所述风箱机构活动安装在机架上。
12.优选的,所述机械手机构包括第一机械手、第二机械手、第三机械手和第四机械手,所述第一机械手、第二机械手和第三机械手内均设置有机械手传动组件,所述第一机械手固定安装在机械手传动机构的输出端,所述第一机械手通过机械手传动组件与第二机械手传动连接,所述第二机械手通过机械手传动组件与第三机械手传动连接,所述第三机械手通过机械手传动组件与第四机械手传动连接,所述夹持机构固定安装在第四机械手内。
13.优选的,所述机械手传动组件包括机械手传动电机、机械手蜗杆和机械手蜗轮,所述机械手传动电机的输出轴与机械手蜗杆传动连接,所述机械手蜗杆与机械手蜗轮传动连接,所述机械手蜗轮分别与第二机械手、第三机械手和第四机械手固定连接。
14.优选的,所述夹持机构包括夹持电机、夹持蜗杆、夹持蜗轮、夹持连杆和卡爪,所述夹持电机固定安装在第四机械手内,且夹持电机的输出轴与夹持蜗杆传动连接,所述夹持蜗杆与夹持蜗轮传动连接,所述夹持连杆活动安装在夹持蜗轮上,且夹持连杆的另一端与卡爪固定连接,所述卡爪穿过第四机械手并延伸至外。
15.优选的,所述机械手传动机构固定安装在机架的上端,且机械手传动机构包括升降组件和旋转组件,所述升降组件包括机械手升降电机、机械手传动皮带、机械手升降丝杆和机械手升降导轨,所述机械手升降电机通过机械手传动皮带与机械手升降丝杆传动连接,所述旋转组件包括旋转主轴、转向电机和减速齿轮箱,所述旋转主轴活动安装在机械手升降导轨上,所述转向电机的输出轴与减速齿轮箱传动连接,所述减速齿轮箱的输出轴与旋转主轴固定连接,所述机械手机构固定安装在旋转主轴的下端。
16.优选的,所述风箱传动机构固定安装在机架的下端,且风箱传动机构包括风箱传动电机、风箱传动丝杆和风箱传动导轨,所述风箱传动电机的输出轴与风箱传动丝杆传动连接,所述风箱传动丝杆与风箱机构传动连接,所述风箱机构活动安装在风箱传动导轨上。
17.优选的,所述风箱机构包括风箱体和工作台,所述风箱体为两面开口的箱体,且风
箱体上设置有ffu和两个开盒组件,所述ffu固定安装在风箱体的下端面,所述开盒组件固定安装在风箱体的上端面,两个所述开盒组件分别位于风箱体上端面开口的两侧,所述工作台固定安装在机架上,且工作台与风箱体的上端面开口形状相契合,所述工作台内设置有解锁组件。
18.优选的,所述开盒组件包括开盒电机、齿条和齿轮拨块,所述开盒电机与齿条传动连接,所述齿条与齿轮拨块传动连接。
19.优选的,所述解锁组件包括解锁电机、解锁传动皮带、解锁丝杆、解锁连杆和解锁拨块,所述解锁电机的输出轴通过解锁传动皮带与解锁丝杆传动连接,所述解锁丝杆上设置有传动块,所述传动块与解锁丝杆活动连接,且传动块与解锁连杆的一端活动连接,所述解锁连杆的另一端与解锁拨块活动连接,所述解锁拨块活动安装在工作台内,且解锁拨块上设置有两个拨柱,两个所述拨柱均穿过工作台延伸至外。
20.与现有技术相比,本实用新型的有益效果如下:
21.本实用新型通过设置机械手机构,所述机械手机构包括第一机械手、第二机械手、第三机械手和第四机械手,所述第一机械手、第二机械手和第三机械手内均设置有机械手传动组件,所述第一机械手通过机械手传动组件与第二机械手传动连接,所述第二机械手通过机械手传动组件与第三机械手传动连接,所述第三机械手通过机械手传动组件与第四机械手传动连接。所述夹持机构固定安装在第四机械手内。
22.工作时,机械手机构首先由机械手传动机构带动第一机械手升降和转动,转动范围为正180度至负180度。并通过第一机械手上装有的机械手传动组件,控制第二机械手旋转,转动范围为正180度至负180度,同理后续机械手均通过前机械手上的机械手传动组件带动旋转,以实现各角度运动,第四机械手上装有夹持机构,对晶圆进行抓取。可有效解决不同加工机型的晶圆上料位置不一致的问题,实现一机多用,达到了适用性强的效果。
附图说明
23.图1为本实用新型的结构示意图之一;
24.图2为本实用新型的结构示意图之二;
25.图3为本实用新型的结构示意图之三;
26.图4为本实用新型的结构示意图之四;
27.图5为本实用新型中风箱体升起时的结构示意图之一;
28.图6为本实用新型中风箱体升起时的结构示意图之二;
29.图7为本实用新型中风箱体升起时的结构示意图之三;
30.图8为本实用新型中风箱体升起时的结构示意图之四;
31.图9为本实用新型中风箱体的结构示意图;
32.图10为本实用新型中工作台的结构示意图;
33.图11为本实用新型中机械手的结构示意图之一;
34.图12为本实用新型中机械手的结构示意图之二;
35.图13为本实用新型中夹持组件的结构示意图。
36.图中的附图标记及名称如下:
37.1、机架;2、机械手传动机构;21、升降组件;211、机械手升降电机;212、机械手传动
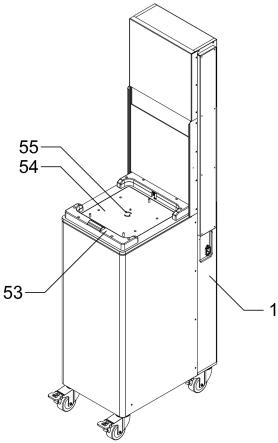
皮带;213、机械手升降丝杆;214、机械手升降导轨;22、旋转组件;221、旋转主轴;222、转向电机;223、减速齿轮箱;3、风箱传动机构;31、风箱传动电机;32、风箱传动丝杆;33、风箱传动导轨;4、机械手机构;41、第一机械手;42、第二机械手;43、第三机械手;44、第四机械手;45、机械手传动组件;451、机械手传动电机;452、机械手蜗杆;453、机械手蜗轮;46、夹持机构;461、夹持电机;462、夹持蜗杆;463、夹持蜗轮;464、夹持连杆;465、卡爪;5、风箱机构;51、风箱体;52、ffu;53、开盒组件;531、开盒电机;532、齿条;533、齿轮拨块;54、工作台;55、解锁组件;551、解锁电机;552、解锁传动皮带;553、解锁丝杆;554、传动块;555、解锁连杆;556、解锁拨块;557、拨柱。
具体实施方式
38.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
39.请参阅图1至图13,本实用新型提供的一种实施例:一种具有多轴联动机械手的晶圆自动传输装置,包括机架1;固定安装在机架1内的机械手传动机构2和风箱传动机构3;与机械手传动机构2传动连接的机械手机构4,所述机械手机构通过数个机械手传动组件45联动形成多轴联动机械手,且机械手机构4上设置有夹持机构46;与风箱传动机构3传动连接的风箱机构5,所述风箱机构5活动安装在机架1上。
40.更具体的,所述机械手机构4包括第一机械手41、第二机械手42、第三机械手43和第四机械手44,所述第一机械手41、第二机械手42和第三机械手43内均设置有机械手传动组件45,所述第一机械手41固定安装在机械手传动机构2的输出端,所述第一机械手41通过机械手传动组件45与第二机械手42传动连接,所述第二机械手42通过机械手传动组件45与第三机械手43传动连接,所述第三机械手43通过机械手传动组件45与第四机械手44传动连接,所述夹持机构46固定安装在第四机械手44内。
41.更具体的,所述机械手传动组件45包括机械手传动电机451、机械手蜗杆452和机械手蜗轮453,所述机械手传动电机451的输出轴与机械手蜗杆452传动连接,所述机械手蜗杆452与机械手蜗轮453传动连接,所述机械手蜗轮453分别与第二机械手42、第三机械手43和第四机械手44固定连接。
42.更具体的,所述夹持机构46包括夹持电机461、夹持蜗杆462、夹持蜗轮463、夹持连杆464和卡爪465,所述夹持电机461固定安装在第四机械手44内,且夹持电机461的输出轴与夹持蜗杆462传动连接,所述夹持蜗杆462与夹持蜗轮463传动连接,所述夹持连杆464活动安装在夹持蜗轮463上,且夹持连杆464的另一端与卡爪465固定连接,所述卡爪465穿过第四机械手44并延伸至外。
43.更具体的,所述机械手传动机构2固定安装在机架1的上端,且机械手传动机构2包括升降组件21和旋转组件22,所述升降组件21包括机械手升降电机211、机械手传动皮带212、机械手升降丝杆213和机械手升降导轨214,所述机械手升降电机211通过机械手传动皮带212与机械手升降丝杆213传动连接,所述旋转组件22包括旋转主轴221、转向电机222和减速齿轮箱223,所述旋转主轴221活动安装在机械手升降导轨214上,所述转向电机222
的输出轴与减速齿轮箱223传动连接,所述减速齿轮箱223的输出轴与旋转主轴221固定连接,所述机械手机构4固定安装在旋转主轴221的下端。
44.更具体的,所述风箱传动机构3固定安装在机架1的下端,且风箱传动机构3包括风箱传动电机31、风箱传动丝杆32和风箱传动导轨33,所述风箱传动电机31的输出轴与风箱传动丝杆32传动连接,所述风箱传动丝杆32与风箱机构5传动连接,所述风箱机构5活动安装在风箱传动导轨33上。
45.更具体的,所述风箱机构5包括风箱体51和工作台54,所述风箱体51为两面开口的箱体,且风箱体51上设置有ffu52和两个开盒组件53,所述ffu52固定安装在风箱体51的下端面,所述开盒组件53固定安装在风箱体51的上端面,两个所述开盒组件53分别位于风箱体51上端面开口的两侧,所述工作台54固定安装在机架1上,且工作台54与风箱体51的上端面开口形状相契合,所述工作台54内设置有解锁组件55。
46.更具体的,所述开盒组件53包括开盒电机531、齿条532和齿轮拨块533,所述开盒电机531与齿条532传动连接,所述齿条532与齿轮拨块533传动连接。
47.更具体的,所述解锁组件55包括解锁电机551、解锁传动皮带552、解锁丝杆553、解锁连杆555和解锁拨块556,所述解锁电机551的输出轴通过解锁传动皮带552与解锁丝杆553传动连接,所述解锁丝杆553上设置有传动块554,所述传动块554与解锁丝杆553活动连接,且传动块554与解锁连杆555的一端活动连接,所述解锁连杆555的另一端与解锁拨块556活动连接,所述解锁拨块556活动安装在工作台54内,且解锁拨块556上设置有两个拨柱557,两个所述拨柱557均穿过工作台54延伸至外。
48.工作原理:
49.首先将晶圆盒放置于工作台54,晶圆盒上预定位凹槽与工作台54相匹配,匹配后,感应器感应到工作台54有产品,此时风箱体51上升,风箱体51上齿轮拨块533合拢,卡在晶圆盒上盖的预留凹槽处,在风箱体51上升同时带动晶圆盒上盖升起,自动带动晶圆开盒,升起的同时,风箱体51内洁净空气与晶圆接触,空气在风箱体51内相对静止,不容易对流导致外界小微粒影响晶圆洁净度,同时风箱体51下方ffu(风机过滤机组)52持续工作,保持风箱体51内部清洁。
50.风箱体51升起后,机械手机构4开始运动,此时晶圆已经开盒,可以被机械手机构4取出。机械手机构4由机械手升降电机211通过机械手传动皮带212带动机械手升降丝杆213转动,进而带动第一机械手41升降,由转向电机222通过减速齿轮箱223减速后带动第一机械手轴向转动,转动范围为正180度至负180度。第一机械手41上装有机械手传动电机451、机械手蜗杆452和机械手蜗轮453,通过机械手传动电机451带动机械手蜗杆452和机械手蜗轮453,控制第二机械手旋转,转动范围为正180度至负180度。同理,后续机械手均通过前一机械手上的机械手传动电机451配合机械手蜗杆452和机械手蜗轮453带动旋转,实现各角度运动。
51.第四机械手44上装有夹持机构,通过夹持电机461带动夹持蜗杆462和夹持蜗轮463转动,进而通过夹持连杆464,控制卡爪465开合,对晶圆进行抓取。
52.对于本领域技术人员而言,显然本实用新型不限于上述示范性实施例的细节,而且在不背离本实用新型的精神或基本特征的情况下,能够以其他的具体形式实现本实用新型。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本实用新
型的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本实用新型内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1