具有灵活电连接器位置的动力机组的制作方法
具有灵活电连接器位置的动力机组
1.相关申请的交叉引用
2.本专利申请要求2020年3月31日提交的序列号为63/002,872的美国临时专利申请的优先权权益,其全部内容通过引用的方式整体并入本文。
技术领域
3.本公开涉及车辆转向动力机组组件,并且更具体地,涉及具有灵活的电连接器位置的此类组件。
背景技术:
4.车辆通常包括电动助力转向(eps)系统来帮助车辆的操作者使车辆转向。eps系统使用传感器检测转向柱的位置和扭矩,并向电动马达提供信号,以使电动马达提供附加扭矩来帮助操作者使车辆转向。所提供的用于帮助操作者转向车辆的附加扭矩会基于车辆特性、行驶条件、道路状况等而变化。
5.eps系统可以利用控制器来接收来自传感器的信号,分析信号并控制电动马达。控制器板(controller board)经由托盘(tray)连接到马达壳体,该托盘在本文中可以被称为连接器板(connector plate)。这些组件一起可以被称为动力机组组件,该动力机组组件为与转向系统相关联的一个或多个功能提供电功率。动力机组组件通常包括电路板或印刷电路板(pcb),其具有与其电连通的电连接器。通常,pcb和电连接器的架构仅允许连接器的单一定向(orientation)以及因此位置,并且因此不能提供设计布局的灵活性。
技术实现要素:
6.根据本公开的一个方面,一种动力机组组件包括围绕纵轴轴向延伸的壳体。该动力组件组件还包括电路板,其具有被壳体覆盖的板主要部分并且具有第一板延伸段,该第一板延伸段远离纵轴径向地延伸,并延伸到壳体外部且不被壳体覆盖。该动力机组组件还包括被设置在电路板的第一板延伸段上的至少一个逻辑连接器。
7.根据本公开的另一方面,一种电动助力转向(eps)系统包括eps壳体。该eps系统还包括动力机组组件。该动力机组组件包括壳体,其具有围绕纵轴从多个凸缘(flange)部分轴向延伸至端部表面的主体,该壳体通过至少一个机械紧固件可操作地耦接到eps壳体,所述至少一个机械紧固件延伸通过所述凸缘部分中的至少一个。该动力机组组件还包括电路板,其具有板主要部分、第一板延伸段和第二板延伸段,该板主要部分被壳体覆盖,该第一板延伸段远离纵轴径向地延伸并延伸到壳体外部且不被壳体覆盖,并且该第二板延伸段远离纵轴径向延伸并延伸到壳体外部且不被壳体覆盖。该动力机组组件还包括至少一个逻辑连接器,其被设置在电路板的第一板延伸段上。该动力机组组件还包括至少一个电源连接器(power connector),其被设置在电路板的第二板延伸段上。
8.通过以下结合附图的描述,这些及其他优点和特征将变得更加明显。
附图说明
9.在说明书结尾处的权利要求中特别指出并清楚地声明了被认为是本发明的主题。通过以下结合附图的详细描述,本发明的前述及其他特征和优点将变得清晰,其中:
10.图1示意性地示出了用于车辆的电动助力转向(eps)系统;
11.图2是动力机组组件的底部透视图;
12.图3是动力机组组件的顶部透视图;
13.图4是动力机组组件的端部视图;
14.图5是动力机组组件的横截面视图;
15.图6是动力机组组件的局部分解视图;
16.图7是动力机组组件的另一局部分解视图;
17.图8是动力机组组件的另一局部分解视图;
18.图9至图11示出了具有外部连接器的动力机组组件的示例构造;
19.图12至图14示出了具有外部连接器的动力机组组件的另一示例构造;
20.图15至图17示出了具有内部连接器的动力机组组件的示例构造;
21.图18至图20示出了具有内部连接器的动力机组组件的另一示例构造;以及
22.图21示出了根据又一示例构造的动力机组组件。
具体实施方式
23.参照附图,但不限于此,本文描述了本公开的实施例。特别地,本文公开了用于电动助力转向(eps)系统的手动动力机组组件。尽管结合管柱式eps系统进行了图示和描述,但是应当理解,其他类型的eps系统(例如,齿条式eps系统)也可以从本文公开的实施例中受益。此外,所示的转向系统具有从转向输入装置到转向齿轮的机械连接,但是应该理解的是,线控转向系统也可以从公开的实施例中受益。因此,示出的实施例不限制可以与手动动力机组组件一起使用的特定应用。
24.图1是适合于实现所公开实施例的电动助力转向系统(eps)40的示例性实施例。转向机构36是齿条小齿轮式系统,并且包括位于壳体50内的齿条(未示出)和位于齿轮壳体52下方的小齿轮(也未示出)。随着操作者输入,即在下文中表示为方向盘26(例如手握式方向盘等)被转动,上转向轴29转动,且通过万向接头34连接到上转向轴29的下转向轴51会转动小齿轮。小齿轮的旋转会移动齿条,齿条的移动会移动连接杆38(仅示出一个),进而移动转向节39(仅示出一个),该转向节39使(一个或多个)可转向轮44(仅示出一个)转动。
25.电动助力转向辅助是由通常表示为附图标记24的控制装置提供的,并且包括控制器16和电机19,该电机19可以是永磁同步马达、永磁直流马达、开关磁阻马达或任何其他类型的马达,该电机19在下文中被称为马达19。控制器16通过线路(line)12由车辆电源10供电。控制器16从传感器接收与eps系统40的各种运行条件和/或输入有关的信息,其示例在下面示出和描述。
26.随着方向盘26被转动,转矩传感器28感测由车辆操作者施加到方向盘26的转矩。转矩传感器28可以包括扭力杆(未示出)和可变电阻型传感器(也未示出),该可变电阻型传感器向控制器16输出与扭力杆上的扭转量有关的可变转矩信号18。虽然这是一种类型的转矩传感器,但是与已知信号处理技术一起使用的任何其他合适的转矩感测设备就足够了。
响应于各种输入,控制器向电动马达19发送命令22,电动马达19通过蜗杆47和蜗轮48向转向系统提供转矩辅助,从而为车辆转向提供转矩辅助。反馈信号21是从电动马达19返回到控制器16的。
27.应当注意,尽管通过参照用于电动转向应用的马达控制来描述所公开的实施例,但是应当理解,这些参照仅是说明性的,并且所公开的实施例可以被应用于采用电动马达的任何马达控制应用,例如转向、阀控制等。此外,本文的参照和描述可以适用于许多形式的参数传感器,包括但不限于转矩、位置、速度等。还应注意,本文对于电机的参照包括但不限于马达,以下为了简洁和简单起见,将在没有限制的情况下仅参照马达。
28.在如图所示的控制系统24中,控制器16利用转矩、位置和速度等来计算用于递送所需输出功率的(一个或多个)命令。控制器16被设置成与马达控制系统的各种系统和传感器进行通信。控制器16接收来自每个系统传感器的信号,量化所接收的信息,并响应于此提供(一个或多个)输出命令信号,在这种情况下,例如,向马达19提供(一个或多个)输出命令信号。控制器16被配置为从逆变器(未示出)产生出所需的(一个或多个)电压,可选地,逆变器可以与控制器16结合起来并在本文中被称为控制器16,使得当电压被施加于马达19时,产生期望的转矩或位置。因为这些电压与马达19的位置和速度以及期望的转矩有关,所以确定了转子的位置和/或速度以及操作者施加的转矩。位置编码器被连接到转向轴51以检测角位置。编码器可以基于光学检测、磁场变化或其他方法来感测旋转位置。典型的位置传感器包括电位计、分解器、同步器、编码器等,以及包括前述中的至少一个的组合。位置编码器输出位置信号20,该位置信号20指示转向轴51的角位置,并由此指示马达19的角位置。
29.如图2
‑
8所示,示出了动力机组组件,并且通常用数字60来引用。如上所述,动力机组组件60是向车辆转向系统的一个或多个系统提供功率的组件。尽管示出和描述的主要是用于为eps系统40供电,但是应当理解,动力机组组件60可以用于为其他电气系统供电。
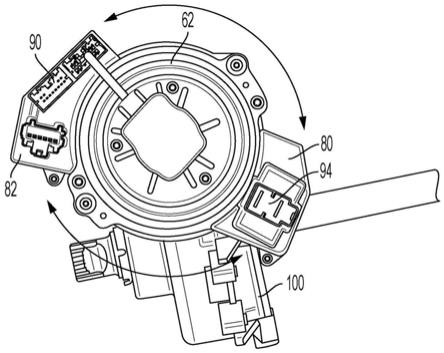
30.动力机组组件包括壳体62,该壳体62安装到散热片托盘64以包围控制器电路板68的一部分和驱动eps系统40的马达轴70。控制器电路板68具有被壳体62覆盖的主要部分72(图5和图6)。如图所示,壳体62具有主体部分74、端部表面76和多个凸缘部分78,这些凸缘部分78位于相对于端部表面76的主体部分74的相对端上。主体部分74包括至少一个大体上圆柱体的部分,但是可以包括一个或多个台阶,如所示的实施例中所示。
31.每个凸缘部分78包括一个或多个孔(aperture),以容纳用于将壳体62耦接到散热片托盘64的机械紧固件和/或容纳位置定位销等。当壳体62耦接到散热片托盘64时,主体部分74和凸缘部分78的周边(perimeter)覆盖控制器电路板68的主要部分72。然而,散热片托盘64和控制器电路板68各自包括大体上对应的段,这些段沿径向向外延伸到壳体62外部的位置。换句话说,散热片托盘64包括一个或多个托盘延伸段80,且控制器电路板68包括一个或多个板延伸段82,每个延伸段充分地延伸以便不被壳体62覆盖。因此,这些延伸段80、82(图5)在壳体62的外部。
32.延伸段80、82提供了附加连接点,其可以基于整个系统的规格来定向。因此,整个动力机组组件60是可调节的,以适应有益于系统的各种定向。这与覆盖壳体内的所有连接点的动力机组组件相反。在所示的实施例中,第一连接点通常用数字90表示并部分地覆盖有第一连接器护罩(shroud)92。第一连接点90是形成逻辑插头(header)的逻辑连接器。第二连接点94是电源连接并且部分地覆盖有第二连接器护罩96。第二连接点94是作为电源插
头的电源连接器。
33.图9
‑
11示出了利用外部主配电板(msb)99根据第一定向耦接到eps系统壳体100的动力机组组件60。在所示的实施例中,连接点90、94被指引为朝向壳体62。箭头98表示动力机组组件60的旋转能力。换句话说,动力机组组件60的角度位置可以改变,以适合整个系统所需的最期望的系统定向。
34.图12
‑
14示出了利用外部msb 99根据另一定向耦接到eps系统壳体100的动力机组组件60。在所示的实施例中,连接点90、94被指引为远离壳体62。这表示什么可以被称为相对于图9
‑
11中所示的实施例的“镜像”定向。箭头98表示动力机组组件60的旋转能力。换句话说,动力机组组件60的角位置可以改变,以适合整个系统所需的最期望的系统定向。
35.图15
‑
18示出了利用内部msb根据第一定向耦接到eps系统壳体100的动力机组组件60。在所示的实施例中,连接点90、94被指引为朝向壳体62。箭头98表示动力机组组件60的旋转能力。换句话说,动力机组组件60的角度位置可以改变,以适合整个系统所需的最理想的系统定向。
36.图18
‑
20示出了利用内部msb根据另一定向耦接到eps系统壳体100的动力机组组件60。在所示的实施例中,连接点90、94被指引为远离壳体62。这表示什么可以被称为相对于图15
‑
18中所示的实施例的“镜像”定向。箭头98表示动力机组组件60的旋转能力。换句话说,动力机组组件60的角位置可以改变,以适合整个系统所需的最期望的系统定向。
37.现在参考图21,动力机组组件60被示出为具有第一连接点和第二连接点90、94,通过使延伸段上的连接点90、94沿圆周间隔开使第一连接点和第二连接点90、94分离。第一连接点和第二连接点90、94的分离程度是可定制的。在所示的实施例中,连接点(即,插头)90、94被分离大约180度,但是应当理解,这仅仅是可以通过控制器电路板68的这些延伸段80、82设置的分离程度的一个示例。例如,在示例实施例中,连接点90、94可以分离超过45度或超过90度。
38.动力机组组件还包括本文公开的功率电感器(power inductor),以用于连接至电源(例如,电池),同时还便于与电路板的顺应式连接(compliant connection)。另外,一个或多个电连接器被提供用于电连接到各种其他组件。
39.本文公开的实施例保持马达壳体直径内的常见电路板布局。通过这样,延伸板部分上的常见马达连接点可以被重新构造为接受不同客户对车辆线束接口的需求。此外,电池电源连接从逻辑电路或通信电路中分离出来,从而允许增加变化的可能性。
40.公开的实施例提供了设计灵活性,以基于车辆总布置(vehicle packaging)和客户偏好提供不同的连接器接入位置。在提供连接器位置的同时保持常见动力机组布局的能力是对以前动力机组设计的改进。使用具有可调节板构造的印刷电路板允许与控制器的低成本互连。
41.通过将主要组件结构放置在马达壳体62的大致圆形直径内,实现了在不影响主马达接口的情况下填充(populate)电路和去掉(depopulate)电路电路的能力,同时仍具有提供不同连接位置且不影响控制器和动力机组的主要结构的灵活性。
42.虽然仅结合有限数量的实施例详细描述了本发明,但应容易理解,本发明不限于这些公开的实施例。而是,可以修改本发明以包含此前未描述但与本发明的精神和范围相当的任何数量的变型、改变、替换或等同布置。另外,虽然已经描述了本发明的各种实施例,
但是应该理解,本发明的各方面可以仅包括所描述的实施例中的一些。因此,本发明不应视为受前述描述的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1