大型单口径射电望远镜及其提升指向误差的方法
1.本发明为射电望远镜技术领域,具体涉及一种大型单口径射电望远镜以及该大型单口径射电望远镜利用可调自适应副反射面提升指向误差的方法。
背景技术:
2.射电望远镜,是一种高增益的射电讯号的收集和检测装置,特别适用于暗物质、脉冲星、引力波、黑洞等深空探测领域,其主反射面口径面积和面型精度直接影信号的接收能力及其接收效率。于是,射电望远镜呈现口径越来越大、面型精度越来越高、结构越来越复杂的发展趋势,同时指向精度成为大型射电望远镜重要性能指标。
3.卡塞格伦型双反射面射电望远镜反射体部分由主、副反射面共同构成,其主反射面为旋转抛物面、副反射面为旋转双曲面,并且旋转抛物面的焦点和旋转双曲面的虚焦点重合。这样的反射面几何配置使得在太阳直接辐射作用下,当一束平行光沿着中心轴方向照射到主反射面后,主面的大部分面板将入射光线反射汇聚至副反射面上,导致副面接收到大密度热流的太阳辐射,出现局部温度过高的现象,严重时甚至达到150℃以上,即工程中称为的“太阳灶”效应。这将显著增大副面温度,相应的热变形将破坏副面面形精度并增加指向误差,极端时会破坏副面附近的电子仪器及电线电缆等器件,甚至中断射电望远镜的观测。基于此,日照对大型单口径射电望远镜指向精度的影响成为设计过程中不可忽视的问题。
4.目前,采用自适应式主反射面形式,控制子面面板的相对位移补偿日照热变形对指向误差的影响,但是这种拼接式主面结构存在造价高、控制困难等诸多问题,更不适用对已有的大型天线的改造。另一方面,自适应式主反射面系统不能解决副面存在的“太阳灶”问题。
技术实现要素:
5.本发明的目的在于提供一种大型单口径射电望远镜及其提升指向误差的方法,提出自适应式副反射面,追踪主反射面日照热变形对指向误差的影响,利用副反射面分块单元加以补偿,并在副反射面上增设散热装置,抑制日照对大口径天线指向误差的影响,并降温解决副面“太阳灶”的困扰。本发明采用光线追踪技术,和深度学习算法实现自适应模型的建立,通过调整副反射面位置达到补偿主反射面指向误差的目的,不仅可以实现单口径大型射电望远镜副面面形误差和指向误差的自适应改善,而且对副反射面的电子元件等进行了有效的散热保护。
6.本发明大型单口径射电望远镜,由方位调整机构、方位座架、俯仰机构、俯仰角度传感器、方位角度传感器、温度应变传感器一、桁架式背架结构、接收机、副反射面、角度控制促动器、平台、连接件、位移控制促动器、主反射面和电动缸组成;方位调整机构用于驱动方位座架调整方位角;俯仰机构的俯仰框架固定在方位座架上,俯仰机构用于调整桁架式背架结构的俯仰角;所述的主反射面与桁架式背架结构通过呈同心圆状分布的若干温度应
变传感器一连接,每个同心圆上排布沿周向均布的多个温度应变传感器一;方位角度传感器固定在俯仰机构的俯仰框架上,监测方位座架的方位角;俯仰角度传感器固定在桁架式背架结构上,监测桁架式背架结构的俯仰角;所述的接收机固定在主反射面上;连接件与主反射面通过三个以上电动缸连接,电动缸的缸体与主反射面球铰接,电动缸的推杆与连接件球铰接;平台与连接件底部通过多个角度控制促动器连接;副反射面由若干分块单元和补形分块组成,整体呈双曲面形状;补形分块与平台固定;分块单元与平台通过多个位移控制促动器连接;分块单元背面固定有散热装置和若干温度应变传感器二。
7.优选地,所述的温度应变传感器一为基于光纤过耦合器结构的温度传感器。
8.优选地,所述的分块单元与平台通过七个位移控制促动器连接,分块单元几何中心处设有一个,其余六个呈正六边形排布在分块单元的各个角位置处。
9.优选地,所述的分块单元背面固定的温度应变传感器二有三个,呈正三角形排布。
10.优选地,所述的散热装置由沿周向均布且交替排布的共面薄膜电极组一和共面薄膜电极组二组成;所述的共面薄膜电极组一由两对共面薄膜电极组成,相邻共面薄膜电极之间设有绝缘板,共面薄膜电极组二由四对共面薄膜电极组成,相邻共面薄膜电极之间设有绝缘板;所述的共面薄膜电极由铜薄膜和微槽道组成;共面薄膜电极由控制变压器进行调压。
11.更优选地,所述的微槽道深0.15mm,铜薄膜厚40μm。
12.更优选地,所述的控制变压器设有三个,呈正三角形排列固定在分块单元背面,每个控制变压器对一个共面薄膜电极组一和共面薄膜电极组二的共面薄膜电极进行调压。
13.该大型单口径射电望远镜提升指向误差的方法,具体如下:
14.步骤一、建立主反射面的偏移量预测模型,具体如下:首先在计算机三维场景中对主、副反射面的初始位姿及对应的环境条件建立有限元模型,其中,主反射面的位姿包括方位角和俯仰角,副反射面的位姿通过各分块单元的几何中心坐标表达,主、副反射面的初始位姿均为无日照导致变形情况下的位姿,环境条件包括天气和时间;然后进行光束模拟,设计入射光线为平行光束,从照射到主反射面开始对光线进行追踪,从主反射面射出的光线照射到副反射面对应的分块单元上,形成反向光线;再对反向光线进行反向光线追踪到主反射面的对应位置上,由于副反射面受热变形导致反向追踪回主反射面的光线位置与平行光束照射位置存在面形误差
△
1;平行光束扫射完整个主反射面后,在主反射面上计算出不同位置的面形误差,这些面形误差的连线形成误差曲线,且这些面形误差曲线拟合后得到主反射面拟合曲线;接着,计算主反射面拟合曲线与主反射面未受平行光束照射前曲线相比存在的偏移量
△
l,以及主反射面拟合曲线与误差曲线相比存在的残余面形误差
△
2;在实际天气和时间情况下,通过主反射面上的各温度位移传感器一测量出主反射面各位置的位移实际值,计算位移实际值与偏移量
△
l的差值,并采用深度学习优化算法对各电动缸的调整量以及各角度控制促动器的运动量与环境条件和差值相关函数的参数进行修正。
15.步骤二、改变环境条件,继续对各电动缸的调整量以及各角度控制促动器的运动量与环境条件和差值相关函数的参数进行训练,直到位移实际值与偏移量
△
l的差值小于预设值时,训练结束,输出理想的各电动缸的调整量以及各角度控制促动器的运动量与环境条件和差值的相关函数以及各环境条件下的残余面形误差
△
2。
16.步骤三、在当前环境条件下,基于理想的各电动缸的调整量以及各角度控制促动
器的运动量与环境条件和差值的相关函数,控制各电动缸的调整量以及各角度控制促动器的运动量,各电动缸驱动连接件、角度控制促动器、平台、位移控制促动器和副反射面同步运动,并通过各角度控制促动器的运动调整平台、位移控制促动器和副反射面同步运动,从而改变副反射面的整体位置,对偏移量
△
l进行整体补偿;而残余面形误差
△
2通过控制副反射面上的位移控制促动器进行局部自适应调节修正,达到提升副反射面面形精度和指向精度的目的。
17.优选地,还建立了主、副反射面温度预测模型,具体如下:将天气、时间以及主反射面的位姿作为输入量,基于控制变量法对位姿、天气、时间逐一采用蒙特卡洛法计算出太阳光照射时主、副反射面各位置的温度理论值;然后,在主反射面实际位姿、实际天气、实际时间情况下,通过主反射面上的各温度位移传感器一和副反射面上的各温度位移传感器二测量出主、副反射面各位置的温度实际值,计算温度理论值与温度实际值之间的误差
△
,并采用深度学习优化算法对蒙特卡洛法中的函数参数进行修正,继续采用输入量训练集进行训练,直到误差
△
小于预设值ε时,函数参数修正结束,输出理想的目标函数。建立主、副反射面温度预测模型后,在不同时间、天气及位姿的状态下对主、副反射面实时温度进行预估,并传递给副反射面上的散热装置进行温度控制。
18.本发明具有的有益效果是:
19.1、采用光线追踪技术,通过对主反射面反射到副反射面的光线进行追踪,可精确计算出副反射面的热量,根据热量的分布可对副反射面进行针对性分块,使其分块合理,便于精确控制其面形精度。
20.2、通过副反射面对主反射面的多条光线返回追踪,可以拟合出主反射面误差曲线,应用深度学习优化算法,实现在不同位姿、天气和时间的条件下对主反射面各位置的偏移量进行大量自主的误差函数修正训练,得出最优目标函数,达到偏移量精确预估的目的,进而通过调整副反射面上的角度控制促动器和位移控制促动器以及电动缸补偿主反射面面形误差和焦距误差,提升副反射面面形精度及指向精度。
21.3、应用深度学习优化算法,实现在不同位姿、天气和时间的条件下对主、副反射面各位置的温度理论值进行大量自主的误差函数修正训练,得出最优目标函数,达到温度精确预估的目的,进而实现副反射面上散热装置自适应散热,保护副反射面周围的电力设备不被烧坏。
22.4、在副反射面每一分块单元背后用微槽道和铜薄膜结合组成电极,构成散热装置,所占体积小,重量轻;通过独特的排列方式,可实现局部针对性散热,通过加装控制变压器,实现了控制电压大小,进而控制散热速度的功能。
附图说明
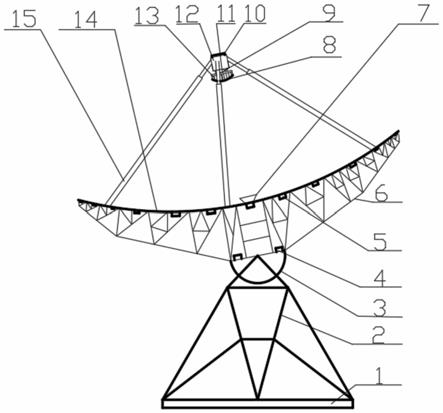
23.图1为本发明大型单口径射电望远镜的整体结构示意图;
24.图2为本发明中主反射面背部的温度应变传感器一排布示意图;
25.图3为本发明中副反射面的各分块单元排布示意图;
26.图4为本发明中副反射面的分块单元上位移控制促动器、温度应变传感器二和散热装置的结构示意图;
27.图5为本发明中副反射面的各单元面位移控制促动器、温度应变传感器二、散热装
置和控制变压器的排布图;
28.图6为本发明根据主、副反射面温度预测模型对散热装置进行温度控制的流程图;
29.图7为本发明根据主反射面的偏移量预测模型对电动缸的调整量、角度控制促动器的运动量和副反射面上的位移控制促动器运动量进行控制的流程图;
30.图8为本发明的主反射面面形误差分解图。
具体实施方式
31.以下结合附图对本发明作进一步说明。
32.如图1所示,大型单口径射电望远镜,由方位调整机构1、方位座架2、俯仰机构3、俯仰角度传感器4、方位角度传感器、温度应变传感器一5、桁架式背架结构6、接收机7、副反射面8、角度控制促动器9、平台11、连接件12、位移控制促动器13、主反射面14和电动缸15组成。方位调整机构1用于驱动方位座架2调整方位角;方位座架2起到支撑作用;俯仰机构3的俯仰框架固定在方位座架2上,俯仰机构3用于调整桁架式背架结构6的俯仰角;主反射面14与桁架式背架结构6通过呈同心圆状分布的若干温度应变传感器一5连接,如图2所示,每个同心圆上排布沿周向均布的多个温度应变传感器一5;方位角度传感器固定在俯仰机构3的俯仰框架上,监测方位座架2的方位角;俯仰角度传感器4固定在桁架式背架结构6上,监测桁架式背架结构6的俯仰角;接收机7固定在主反射面14上,用于接收天体的电磁波信号;连接件12与主反射面14通过三个以上电动缸15连接,电动缸15的缸体与主反射面14球铰接,电动缸15的推杆与连接件12球铰接;平台11与连接件12底部通过多个角度控制促动器9连接;如图3所示,副反射面8由若干分块单元18(优选呈正六边形)和补形分块组成,整体呈双曲面形状;补形分块与平台11固定;如图4所示,分块单元18与平台11通过多个位移控制促动器13连接;分块单元18背面固定有散热装置和若干温度应变传感器二19;方位调整机构1、俯仰机构3、电动缸15、角度控制促动器9和位移控制促动器13均由控制器控制,俯仰角度传感器4、方位角度传感器、温度应变传感器一5、温度应变传感器二19和接收机7的信号输出端均接控制器。
33.其中,方位调整机构1可以选用旋转工作台;俯仰机构3包括俯仰框架、电机和齿轮副;电机的底座固定在俯仰框架上;电机的输出轴驱动齿轮副,由齿轮副带动桁架式背架结构6。
34.作为一个优选实施例,如图2所示,温度应变传感器一5为基于光纤过耦合器结构的温度传感器。
35.作为一个优选实施例,如图5所示,分块单元18与平台11通过七个位移控制促动器13连接,分块单元18几何中心处设有一个,其余六个呈正六边形排布在分块单元18的各个角位置处。
36.作为一个优选实施例,如图5所示,分块单元18背面固定的温度应变传感器二19有三个,呈正三角形排布。
37.作为一个优选实施例,如图4和5所示,散热装置由沿周向均布且交替排布的共面薄膜电极组一和共面薄膜电极组二组成;共面薄膜电极组一由两对共面薄膜电极组成,相邻共面薄膜电极之间设有绝缘板20,共面薄膜电极组二由四对共面薄膜电极组成,相邻共面薄膜电极之间设有绝缘板20;共面薄膜电极由铜薄膜17和微槽道16组成;共面薄膜电极
由太阳能电池板10供电,并由控制变压器21进行调压,控制变压器21使共面薄膜电极的电子与空气中的中性离子发生碰撞进行电离,此时共面薄膜电极之间形成稳定的等离子区域,加速表面气体的流速,进而达到散热的目的;控制变压器21由控制器控制。
38.作为一个更优选实施例,微槽道16深0.15mm,铜薄膜17厚40μm。
39.作为一个更优选实施例,控制变压器21设有三个,呈正三角形排列固定在分块单元18背面,每个控制变压器21对一个共面薄膜电极组一和共面薄膜电极组二的共面薄膜电极进行调压。
40.作为一个优选实施例,如图1所示,太阳能电池板10固定在连接件12上,为方位调整机构1、俯仰机构3、电动缸15和控制器供电,控制器给角度控制促动器9和位移控制促动器13供电。
41.如图7和8所示,该大型单口径射电望远镜提升指向误差的方法,具体如下:
42.步骤一、建立主反射面的偏移量预测模型,具体如下:首先在计算机三维场景中对主、副反射面的初始位姿及对应的环境条件建立有限元模型,其中,主反射面14的位姿包括方位角和俯仰角,副反射面的位姿通过各分块单元18的几何中心坐标表达,主、副反射面的初始位姿均为无日照导致变形情况下的位姿,环境条件包括天气和时间(不同时间的日照强度不同,建立各季节下各整点时刻与日照强度的对照表);然后进行光束模拟,设计入射光线为平行光束22,从照射到主反射面14开始对光线进行追踪,从主反射面射出的光线照射到副反射面8对应的分块单元18上,形成反向光线23;再对反向光线23进行反向光线追踪到主反射面14的对应位置上,由于副反射面受热变形导致反向追踪回主反射面的光线位置与平行光束22照射位置存在面形误差
△
1;平行光束22扫射完整个主反射面后,在主反射面上计算出不同位置的面形误差,这些面形误差的连线形成误差曲线25,且这些面形误差曲线拟合后得到主反射面拟合曲线24;接着,计算主反射面拟合曲线24与主反射面14未受平行光束22照射前曲线相比存在的偏移量
△
l,以及主反射面拟合曲线24与误差曲线25相比存在的残余面形误差
△
2;在实际天气和时间情况下,通过主反射面14上的各温度位移传感器一5测量出主反射面各位置的位移实际值,计算位移实际值与偏移量
△
l的差值,并采用深度学习优化算法对各电动缸15的调整量以及各角度控制促动器9的运动量与环境条件和差值相关函数的参数进行修正。
43.步骤二、改变环境条件,继续对各电动缸15的调整量以及各角度控制促动器9的运动量与环境条件和差值相关函数的参数进行训练,直到位移实际值与偏移量
△
l的差值小于预设值时,训练结束,输出理想的各电动缸15的调整量以及各角度控制促动器9的运动量与环境条件和差值的相关函数以及各环境条件下的残余面形误差
△
2。
44.步骤三、在当前环境条件下,基于理想的各电动缸15的调整量以及各角度控制促动器9的运动量与环境条件和差值的相关函数,控制各电动缸15的调整量以及各角度控制促动器9的运动量,各电动缸15驱动连接件12、角度控制促动器9、平台11、位移控制促动器13和副反射面8同步运动,并通过各角度控制促动器9的运动调整平台11、位移控制促动器13和副反射面8同步运动,从而改变副反射面8的整体位置,对偏移量
△
l进行整体补偿;而残余面形误差
△
2通过控制副反射面8上的位移控制促动器13进行局部自适应调节修正,达到提升副反射面面形精度和指向精度的目的。
45.作为一个优选实施例,如图6所示,还建立了主、副反射面温度预测模型,具体如
下:将天气、时间以及主反射面14的位姿作为输入量,基于控制变量法对位姿、天气、时间逐一采用蒙特卡洛法计算出太阳光照射时主、副反射面各位置的温度理论值;然后,在主反射面14实际位姿、实际天气、实际时间情况下,通过主反射面14上的各温度位移传感器一5和副反射面上的各温度位移传感器二19测量出主、副反射面各位置的温度实际值,计算温度理论值与温度实际值之间的误差
△
,并采用深度学习优化算法对蒙特卡洛法中的函数参数进行修正,继续采用输入量训练集进行训练,直到误差
△
小于预设值ε时,函数参数修正结束,输出理想的目标函数。建立主、副反射面温度预测模型后,在不同时间、天气及位姿的状态下对主、副反射面实时温度进行预估,并传递给副反射面上的散热装置进行温度控制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1