隔离开关操作机构及其工作方法与流程
1.本发明涉及一种隔离开关操作机构及其工作方法。
背景技术:
2.如图1图2图3所示;传统的隔离开关操作机构包括隔离操作轴21、接地操作轴22、输出轴24、指示轴23、储能弹簧3、上拐臂31、下拐臂32、输出凸轮5、上驱动杆41、下驱动杆42以及同步齿轮组件6;各部件的配合连接、工作原理关系如下:
3.隔离操作轴21上设置上拐臂31、用于带动上拐臂31做转动,接地操作轴22上设置下拐臂32、用于带动下拐臂32做转动;储能弹簧3上端连接上拐臂31,储能弹簧3下端连接下拐臂32;隔离操作轴21在做隔离合闸或者隔离分闸作业时,均需要先带动上拐臂31做储能旋转(即压缩储能弹簧3),当上拐臂31旋转过三点一线位置后,上拐臂31在储能弹簧3的释能作用力下继续旋转;
4.同样的,接地操作轴22做接地合闸和接地分闸作业时,也均需要先带动下拐臂32做储能旋转(即压缩储能弹簧3),当下拐臂32旋转过三点一线位置后,储能弹簧3开始释能,带动下拐臂32由储能弹簧3释能作用力下继续旋转。
5.输出轴24固定设置在输出凸轮5上,输出轴24与隔离开关的主轴连接,输出轴24与接地轴之间通过同步齿轮组件6连接,使输出轴24和指示轴23做同步转动;
6.输出凸轮5上开设两条滑槽,上滑槽和下滑槽,上滑槽与上驱动杆41的销柱配合,下滑槽与下驱动杆42的销柱配合。
7.上驱动杆41转动设置在隔离操作轴21上,上驱动杆41在隔离操作轴21上相对上拐臂31存在旋转空间,上拐臂31的销轴与上驱动杆41之间挡接配合,上驱动杆41的销轴位于输出凸轮5的上滑槽内并与输出凸轮5形成挡接配合,隔离操作轴21通过上拐臂31、上驱动杆41带动输出凸轮5旋转。
8.下驱动杆42转动设置在接地操作轴22上,下驱动杆42在接地操作轴22上相对下拐臂32存在旋转空间,下拐臂32的销轴与下驱动杆42之间挡接配合,下驱动杆42的销轴位于输出凸轮5的下滑槽内并与输出凸轮5形成挡接配合,接地操作轴22通过下拐臂32、下驱动杆42带动输出凸轮5旋转。
9.如图4图5图6所示,隔离开关包括主轴71、刀杆72、上静触座74以及接地触头73,主轴71与隔离开关机构的输出轴24连接,主轴71带动刀杆72在上静触座74以及接地触头73之间旋转,主轴71带动刀杆72与上静触座74接触时隔离开关合闸,主轴71带动刀杆72与接地触头73接触时隔开开关处于接地合闸,主轴71带动刀杆72处于上静触座74和接地触头73中间位置时隔离开关分闸,隔离开关的具体工作原理可以参照我司在先专利(cn213242381u一体式负荷开关)。
10.整个隔离开关操作机构的功能就是通过输出轴24在三工位之间的往复旋转,最终来带动隔离开关的主轴71在三个工位之间往复旋转,即,开关合闸、开关分闸(同时也处于接地分闸)以及接地合闸。
11.现在存在的问题是:隔离开关用在环保柜上时,刀杆72会做的比较大,三把刀的重量加起来会达到十几斤,隔离开关的刀杆72处在中间位置时,即开关分闸(同时也处于接地分闸),如果隔离操作轴21做隔离合闸旋转(即需要刀杆72从中间向上旋转),那么隔离操作轴21就会带动上拐臂31先做储能转动(先压缩储能弹簧3),此时上拐臂31的销轴就会离开上驱动杆41(即不在挡接住上驱动杆41),此时的上驱动杆41没有受到约束力,那么刀杆72的重力就会开始起作用,刀杆72开始往下旋转,即向接地合闸位置旋转,刀杆72就会靠近接地触头73,如果距离足够近,刀杆72带有高压电的情况下就会发生放电情况;直至上拐臂31继续旋转过三点一线位置时,储能弹簧3开始释能,才开始带动上拐臂31做释能转动,这时候上拐臂31的挡销才会继续挡接上驱动杆41,从而恢复对上驱动杆41的约束力,随着上拐臂31旋转到隔离合闸,通过上驱动杆41、输出凸轮5、输出轴24、主轴71带动刀杆72与上静触座74接触,实现隔开开关合闸。
12.同样的,隔开开关从接地分闸切换至接地合闸位置,即刀杆72从中间位置向下旋转至于接地触头73接触,那么就要旋转接地操作轴22,接地操作轴22就会带动下拐臂32先做储能旋转(先压缩储能弹簧3),此时下拐臂32的销轴就会离开下驱动杆42(即不在挡接住下驱动杆42),此时的下驱动杆42没有受到约束力,那么刀杆72的重力就会开始起作用,刀杆72提前往下旋转,即向接地合闸位置旋转,刀杆72就会先靠近接地触头73,如果距离足够近,刀杆72带有高压电的情况下就会发生放电情况;直至下拐臂32继续旋转过三点一线位置时,储能弹簧3开始释能开始带动下拐臂32做释能转动,这时候下拐臂32的挡销才会继续挡接下驱动杆42,从而恢复对下驱动杆42的约束力,随着下拐臂32旋转到接地合闸,通过下驱动杆42、输出凸轮5、输出轴24、主轴71带动刀杆72与接地触头73接触,实现隔接地合闸。
13.因此,综上所述,现在隔离开关操作机构存在,当隔离开关处于隔离分闸(同时也是接地分闸)的时候,隔离操作轴21带动上拐臂31做储能旋转或者接地操作轴22带动下拐臂32做储能旋转的这段时间内,由于缺少对上驱动杆41和下驱动杆42的约束,造成隔离开关的刀杆72会因为自重掉向接地合闸位,造成安全隐患的问题。
技术实现要素:
14.本发明要解决的技术问题是:克服现有技术的不足,提供一种隔离开关操作机构及其工作方法,解决隔离操作轴带动上拐臂做储能旋转或者接地操作轴带动下拐臂做储能旋转的这段时间内,由于缺少对上驱动杆和下驱动杆的约束,造成隔离开关的刀杆会因为自重掉向接地合闸位,造成安全隐患的问题。
15.本发明解决其技术问题所采用的技术方案是:
16.第一方面:
17.提供一种隔离开关操作机构,包括
18.隔离操作轴、接地操作轴、储能弹簧、指示轴以及输出轴;
19.所述隔离操作轴上设置上拐臂,所述接地操作轴上设置下拐臂,所述上拐臂和下拐臂之间设置储能弹簧;
20.所述指示轴与输出轴做同步旋转,所述输出轴与隔离开关主轴固定连接;
21.所述隔离操作轴与指示轴之间设置上限位机构;
22.所述隔离操作轴在带动上拐臂做储能旋转的行程内,所述上限位机构适于限制指
示轴做旋转,以限制输出轴做旋转。
23.进一步的,所述上限位机构包括上限位凸轮、上限位杆以及棘轮;
24.所述上限位凸轮固定在隔离操作轴上,所述棘轮固定设置在指示轴上;
25.所述上限位杆做弹性旋转设置,所述上限位杆上端与上限位凸轮滑动抵接配合,所述上限位杆下端与棘轮滑动抵接配合;
26.在所述隔离操作轴的储能旋转行程内,所述上限位凸轮经上限位杆抵接棘轮、以限制指示轴旋转;
27.在所述隔离操作轴旋转至释能旋转行程后,所述棘轮脱离上限位杆的限制。
28.进一步的,所述接地操作轴与指示轴之间设置下限位机构;
29.所述接地操作轴在带动下拐臂做储能旋转的行程内,所述下限位机构适于限制指示轴做旋转,以限制输出轴做旋转。
30.进一步的,所述下限位机构包括下限位凸轮、下限位杆以及棘轮;
31.所述下限位凸轮固定在接地操作轴上,所述棘轮固定设置在指示轴上;
32.所述下限位杆做弹性旋转设置,所述下限位杆下端与下限位凸轮滑动抵接配合,所述下限位杆上端与棘轮滑动抵接配合;
33.在所述接地操作轴的储能旋转行程内,所述下限位凸轮经下限位杆抵接棘轮、以限制指示轴旋转;
34.在所述接地操作轴旋转至释能旋转行程后,所述棘轮脱离下限位杆的限制。
35.第二方面:
36.提供一种隔离开关操作机构的工作方法,采用上述的隔离开关操作机构,包括
37.隔离合闸作业:
38.所述隔离操作轴从隔离分闸向隔离合闸的旋转时,在隔离操作轴的储能行程内,所述上限位凸轮经上限位杆抵接棘轮、以限制指示轴旋转,在隔离操作轴进入释能行程后,所述上限位杆脱离对棘轮的限制;
39.接地合闸作业:
40.所述接地操作轴从接地分闸向接地合闸的旋转时,在接地操作轴的储能行程内,所述下限位凸轮经下限位杆抵接棘轮、以限制指示轴旋转,在接地操作轴进入释能行程后,所述下限位杆脱离对棘轮的限制。
41.本发明的有益效果是:
42.本发明提供一种隔离开关操作机构及其工作方法,依靠增设的上限位机构,可以使隔离操作轴在从隔离分闸向隔离合闸旋转过程中,在带动上拐臂做储能旋转的行程内可以限制指示轴旋转,进而限制隔离开关中的主轴因为自重而向接地分闸位旋转,提升机构安全性。
43.依靠增设的下限位机构,可以使接地操作轴在从接地分闸向接地合闸旋转过程中,在带动下拐臂做储能旋转的行程内可以限制指示轴旋转,进而限制隔开关中的主轴因为自重而提前向接地分闸位旋转,提升机构安全性。
附图说明
44.下面结合附图对本发明进一步说明。
45.图1图2图3是传统的隔离开关操作机构示意图;
46.图4是隔离开关处于隔离分闸位(同时也是接地分闸位)的示意图;
47.图5是隔离开关处于隔离合闸位的示意图;
48.图6是隔离开关处于接地合闸位的示意图;
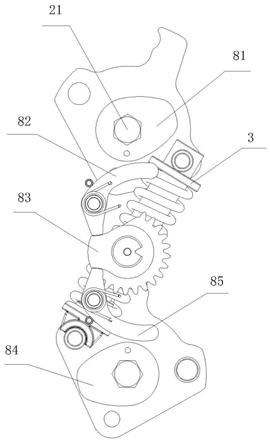
49.图7图8是本发明隔离开关操作机构处于隔离分闸(接地分闸)位的示意图;
50.图9图10是本发明隔离开关操作机构处于隔离合闸位的示意图;
51.图11图12是本发明隔离开关操作机构处于接地合闸位的示意图;
52.其中,21、隔离操作轴,22、接地操作轴,23、指示轴,24、输出轴,3、储能弹簧,31、上拐臂,32、下拐臂,41、上驱动杆,42、下驱动杆,5、输出凸轮,6、同步齿轮组件;
53.71、主轴,72、刀杆,73、接地触头,74、上静触座;
54.81、上限位凸轮,82、上限位杆,83、棘轮,84、下限位凸轮,85、下限位杆。
具体实施方式
55.现在结合具体实施例对本发明作进一步的说明。这些附图均为简化的示意图仅以示意方式说明本发明的基本结构,因此其仅显示与本发明有关的构成。
56.实施例一
57.如图1至图12所示,一种隔离开关操作机构,包括隔离操作轴21、接地操作轴22、储能弹簧3、指示轴23、输出凸轮5、上驱动杆41、下驱动杆42以及输出轴24;
58.所述隔离操作轴21上设置上拐臂31,所述接地操作轴22上设置下拐臂32,所述上拐臂31和下拐臂32之间设置储能弹簧3;
59.隔离操作轴21上套接上驱动杆41,上驱动杆41与上拐臂31之间经销轴形成挡接配合,上驱动杆41的销轴与输出凸轮5的上滑槽之间形成挡接滑动配合;
60.所述指示轴23与输出轴24之间连接同步齿轮组件6、以使指示轴23和输出轴24做同步旋转,所述输出轴24与隔离开关主轴71固定连接;
61.所述隔离操作轴21与指示轴23之间设置上限位机构;
62.所述隔离操作轴21在带动上拐臂31做储能旋转的行程内,所述上限位机构适于限制指示轴23做旋转,以限制输出轴24做旋转。
63.具体的,作为本实施例中一种可选的实施方式,如图7至图12所示,所述上限位机构包括上限位凸轮81、上限位杆82以及棘轮83;
64.所述上限位凸轮81固定在隔离操作轴21上,所述棘轮83固定设置在指示轴23上;
65.所述上限位杆82做弹性旋转设置,所述上限位杆82上端与上限位凸轮81滑动抵接配合,所述上限位杆82下端与棘轮83滑动抵接配合;
66.隔离操作机构做隔离合闸时,在所述隔离操作轴21的储能旋转行程内,所述上限位凸轮81经上限位杆82抵接棘轮83、以限制指示轴23旋转,此时,指示轴23限制住了旋转,经同步齿轮组件6也就限制住了输出轴24旋转,最终就限制住了隔离开关中的主轴71和刀杆72旋转,使刀杆72稳定在隔离分闸位置,防止刀杆72因自重向下旋转而发生危险;
67.在所述隔离操作轴21带动上拐臂31旋转至释能旋转行程后(即上拐臂31旋转过三点一线),所述棘轮83脱离上限位杆82的限制,此时,储能弹簧3的释能作用力快速带动上拐臂31做释能旋转,上拐臂31经上驱动杆41、输出凸轮5、输出轴24最终带动主轴71做隔离合
闸旋转,使刀杆72向上旋转到与上静触座74插接接触。
68.具体的,作为本实施例中一种可选的实施方式,所述接地操作轴22与指示轴23之间设置下限位机构;
69.所述接地操作轴22在带动下拐臂32做储能旋转的行程内,所述下限位机构适于限制指示轴23做旋转,以限制输出轴24做旋转。
70.接地操作轴22上设置下驱动杆42,下驱动杆42与下拐臂32通过销轴挡接配合,下驱动杆42的销轴与输出凸轮5的下滑槽配合、与输出凸轮5形成挡接配合;下拐臂32旋转时,通过下驱动杆42可以带动输出凸轮5旋转。
71.具体的,作为本实施例中一种可选的实施方式,如图7至图12所示,所述下限位机构包括下限位凸轮84、下限位杆85以及棘轮83;
72.本实施例中,下限位机构的棘轮83与上限位机构的棘轮83为同一个;
73.所述下限位凸轮84固定在接地操作轴22上,所述棘轮83固定设置在指示轴23上;
74.所述下限位杆85做弹性旋转设置,所述下限位杆85下端与下限位凸轮84滑动抵接配合,所述下限位杆85上端与棘轮83滑动抵接配合;
75.接地操作轴22做接地合闸时,在所述接地操作轴22的储能旋转行程内,所述下限位凸轮84经下限位杆85抵接棘轮83、以限制指示轴23旋转;同样的,此时,指示轴23限制住了旋转,经同步齿轮组件6也就限制住了输出轴24旋转,最终就限制住了隔离开关中的主轴71和刀杆72旋转,使刀杆72稳定在隔离分闸位置,防止刀杆72因自重向下旋转而发生危险;
76.在所述接地操作轴22带动下拐臂32旋转至释能旋转行程后(即下拐臂32旋转过三点一线),所述棘轮83脱离下限位杆85的限制;此时,储能弹簧3的释能作用力带动下拐臂32快速旋转,下拐臂32经下驱动杆42、输出凸轮5、输出轴24最终带动隔离开关的主轴71和导杆向下旋转并与接地触头73接触。
77.实施例二
78.一种隔离开关操作机构的工作方法,采用实施例一的隔离开关操作机构,包括隔离合闸作业和接地合闸作业;、
79.如图7图8所示,隔离操作机构处于隔离分闸位(接地分闸位),此时隔离开关处于如图4的状态;隔离操作机构上限位机构中的上限位杆82下端抵紧棘轮83,限制住指示轴23,从而限制住了隔离开关刀杆72、主轴71受重力向下旋转;先限位机构中的下限位杆85抵紧棘轮83,也限制住了指示轴23,从而可以限制隔离开关的刀杆72、主轴71向上旋转,接下来进行分别进行隔离合闸作业和接地合闸作业。
80.隔离合闸作业:
81.所述隔离操作轴21从隔离分闸向隔离合闸的旋转时,在隔离操作轴21带动上拐臂31的储能行程内,所述上限位凸轮81经上限位杆82抵接棘轮83、以限制指示轴23旋转,在隔离操作轴21带动上拐臂31旋转过三点一线位置后,上拐臂31就进入释能行程后,所述上限位杆82才脱离对棘轮83的限制,储能弹簧3开始释能,带动上拐臂31做释能旋转,上拐臂31经上驱动杆41、输出凸轮5、输出轴24带动隔离开关主轴71、刀杆72旋转至如图5所示状态,此时隔离操作机构变为如图9图10所示状态。
82.隔离合闸作业中所谓的三点一线具体是指:隔离操作轴21为第一点,储能弹簧3上端与上拐臂31的连接轴为第二点,储能弹簧3下端与下拐臂32的连接轴为第三点。
83.接地合闸作业:
84.所述接地操作轴22从接地分闸向接地合闸的旋转时,在接地操作轴22带动下拐臂32的储能行程内,所述下限位凸轮84经下限位杆85抵接棘轮83、以限制指示轴23旋转,在接地操作轴22带动下拐臂32旋转过三点一线位置后,进入释能行程后,所述下限位杆85脱离对棘轮83的限制,储能弹簧3释能带动下拐臂32做释能转动,下拐臂32经下驱动杆42、输出凸轮5、输出轴24带动隔离开关主轴71、刀杆72旋转至如图6所示状态,此时隔离操作机构变为如图11图12所示状态。
85.接地合闸作业中所谓的三点一线具体是指:接地操作轴22为第一点,储能弹簧3下端与下拐臂32的连接轴为第二点,储能弹簧3上端与上拐臂31的连接轴为第三点。
86.隔离分闸作业和接地分闸作业不存在隔离合闸作业和接地合闸作业存在的问题;因此,当刀杆72处于隔离分闸位的时候,刀杆72与上静触座74插接是插接在一起,刀杆72与上静触座74之间存在摩擦力,此时,如果做隔离分闸旋转时,在上拐臂31的储能行程内,即使上拐臂31与上驱动杆41脱离,刀杆72与上静触座74之间的摩擦力也不会时刀杆72掉下来。
87.同样的,接地分闸作业时,刀杆72本身就与接地触头73插接接触在一起,此时,接地操作轴22在上拐臂31的储能行程内,即使下拐臂32与下驱动杆42脱离,刀杆72与下静触座之间的摩擦力也不会时刀杆72掉下来。
88.本发明的隔离开关操作机构,主要针对隔离合闸作业和接地合闸作业中起作用,依靠增设的上限位机构,可以使隔离操作轴21在从隔离分闸向隔离合闸旋转过程中,在带动上拐臂31做储能旋转的行程内可以限制指示轴23旋转,进而限制隔离开关中的主轴71因为自重而向接地分闸位旋转,提升机构安全性。
89.依靠增设的下限位机构,可以使接地操作轴22在从接地分闸向接地合闸旋转过程中,在带动下拐臂32做储能旋转的行程内可以限制指示轴23旋转,进而限制隔开关中的主轴71因为自重而提前向接地分闸位旋转,提升机构安全性。
90.以上述依据本发明的理想实施例为启示,通过上述的说明内容,相关工作人员完全可以在不偏离本项发明技术思想的范围内,进行多样的变更以及修改。本项发明的技术性范围并不局限于说明书上的内容,必须要根据权利要求范围来确定其技术性范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1