工件清洗装置的制作方法
1.本发明涉及一种进行平板状工件的清洗的工件清洗装置。
背景技术:
2.作为制造半导体装置等的工序之一,有进行晶片(硅晶片等)的研磨的工序。作为一例,已知有如下方法:在将晶片粘接于固定板的状态下一边压接于平台一边使其旋转,由此进行该晶片的研磨。
3.在利用上述那样的方法进行晶片的研磨的情况下,若在粘接于固定板的晶片的面上附着有尘埃,则该部分被强力地压接于平台而比周围磨削得多,因此可能产生无法得到规定的平面度这样的不良情况。因此,重要的是在进行研磨之前进行晶片的清洗来去除尘埃。作为进行晶片清洗的装置的一例,公开了专利文献1(参照日本特开平7
‑
263393号公报)中记载的清洗装置。
4.现有技术文献
5.专利文献
6.专利文献1:日本特开平7
‑
263393号公报
7.在专利文献1所例示的清洗装置中,成为如下结构:使晶片成为旋转的状态,一边向其上表面供给纯水,一边使刷部从晶片的中央位置移动至周缘位置而进行清洗,在清洗后使晶片的旋转速度上升而进行除水(旋转干燥)。然而,进行该清洗以及除水的工序的处理时间(生产节拍时间)长,处于瓶颈阶段,成为无法提高制造效率的较大的主要原因。
技术实现要素:
8.本技术发明人进行了深入研究,结果查明了在专利文献1所例示那样的以往的清洗装置中,利用一个旋转装置实施清洗以及除水的结构成为处理时间(生产节拍时间)变长的主要原因。本发明是鉴于这些见解而完成的,其目的在于提供一种工件清洗装置,能够缩短进行例示为晶片的平板状工件的清洗以及除水的工序中的处理时间,实现制造效率的提高。
9.本发明通过作为一个实施方式如以下记载的解决手段来解决上述课题。
10.本发明的工件清洗装置的要件在于,具备:臂,其对平板状的工件进行保持并进行搬运;和清洗机构,其对由所述臂进行搬运中的所述工件进行清洗,所述清洗机构具有:洒水部,其对所述工件的规定面进行洒水;以及接触清洗部,其与所述规定面接触而进行清洗,所述接触清洗部构成为,在被旋转驱动或振幅驱动的状态下,在相对于所述工件的搬运方向以90度或规定角度相交的方向上往复移动,作为所述臂,具备并列设置且分别独立地进行所述工件的搬运的第一臂及第二臂,作为所述清洗机构,具备:第一清洗机构,其对由所述第一臂进行搬运的所述工件进行清洗;以及第二清洗机构,其对由所述第二臂进行搬运的所述工件进行清洗,所述工件交替地被载置于所述第一臂和所述第二臂,构成为并行地进行搬运和清洗,所述工件清洗装置还具备:载置部,收纳有所述工件的多个料盒呈圆弧
状载置于所述载置部;以及第一手部,其配设于呈圆弧状载置的所述多个料盒的中心位置,从所述多个料盒依次取出所述工件并交替地载置于所述第一臂上以及所述第二臂上。
11.发明效果
12.根据本发明,能够缩短进行平板状工件的清洗以及除水的工序中的处理时间。因此,例如,在该工件是用于半导体装置的制造的硅晶片的情况下,在半导体装置的制造工序中,能够实现基于生产节拍时间的缩短带来的制造效率的提高。
附图说明
13.图1是表示本发明的实施方式的工件清洗装置的例子的侧视图。
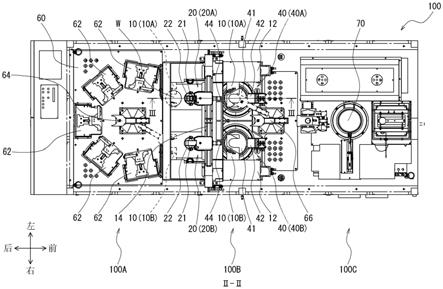
14.图2是图1所示的工件清洗装置的ii
‑
ii线剖视图。
15.图3是图2所示的工件清洗装置的iii
‑
iii线剖视图。
具体实施方式
16.以下,参照附图对本发明的实施方式进行详细说明。图1是表示本发明的实施方式的工件清洗装置100的例子的概略图(侧视图)。另外,图2是图1中的ii
‑
ii线剖视图,图3是图2中的iii
‑
iii线剖视图。另外,为了便于说明,有时在图中通过箭头来说明工件清洗装置100中的前后、左右、上下的方向。另外,在用于说明各实施方式的所有附图中,对具有相同功能的部件标注相同的附图标记,有时省略其重复的说明。
17.本实施方式的工件清洗装置100是进行平板状的工件w的清洗的装置。作为该工件w,以圆板状的晶片(硅晶片等)为例进行说明,但当然也能够适用于其他平板状(特别是圆板状)的工件w。
18.如图1、图2所示,工件清洗装置100主要构成为具备:供给工件w的供给单元100a;对工件w进行清洗的清洗单元100b;和后处理单元100c,其根据需要对清洗后的工件w进行后处理并且将其搬出。根据这些概略结构进行说明。
19.首先,供给单元100a具备:载置部60,收纳有工件w的多个料盒62载置于该载置部60;以及第一手部64,其进行工件w的取出以及向后续单元的搬运(另外,利用虚线示出移位位置)。由此,通过第一手部64从料盒62依次取出工件w并向后续的清洗单元100b搬运。
20.接着,清洗单元100b具备对从供给单元100a供给来的工件w进行搬运的臂10(另外,利用虚线示出移位位置)。另外,具备进行工件w的清洗的清洗机构20、以及对附着于进行了清洗后的工件w上的水进行去除(除水)的除水机构40。进而,具备进行工件w向后续单元的搬运的第二手部66(另外,利用虚线示出移位位置)。由此,进行工件w的搬运、清洗以及除水,向后续的后处理单元100c搬运。
21.接着,后处理单元100c具备对清洗后的工件w进行所需的后处理的结构。例如,在使用晶片作为工件w来制造半导体装置的情况下,作为后工序,实施将晶片粘接于固定板(未图示)的工序、将粘接于固定板的晶片一边压接于平台一边旋转来进行研磨的工序等。因此,在后处理单元100c中,考虑具备在工件w(这里为晶片)的背面涂布粘接剂的涂布机构70、对设置于工件w的缺口进行检测的检测机构(未图示)、把持工件w并搬运至固定板上的搬运机构(未图示)等的结构例。但是,并不限定于这些结构。
22.接着,对工件清洗装置100的清洗单元100b的结构进行详细说明。
23.首先,如图2、图3所示,清洗单元100b具备臂10,该臂10对由供给单元100a的第一手部64搬运来的工件w进行载置并进行搬运。臂10构成为与直动致动器12连结,在装置的前后方向上进行直线移动。在该臂10的上表面设置有对工件w进行保持的保持槽和使保持槽内产生真空而进行真空吸附的吸附孔。由此,工件w被保持而不会偏移,能够得到可靠地搬运的作用。另外,保持机构不限于此,也可以采用夹持工件w的外周部的结构等(未图示)。
24.接着,清洗单元100b具备清洗机构20,该清洗机构对利用臂10进行的搬运中、即以规定速度进行直线移动中的工件w进行清洗。在该清洗机构20设置有:洒水部21,其对工件w的规定面(这里为上表面)进行洒水;和接触清洗部22,其使末端部(下端部)与工件w的规定面(上表面)接触而进行清洗。例如,接触清洗部22构成为具备使刷毛的末端接触来进行刷洗(清洗)的刷子。作为一例,接触清洗部22构成为,与驱动源(作为一例为电动马达)23连结而对与工件w接触的接触部(这里为刷子)进行旋转驱动,并且整体借助直动致动器14在装置的左右方向上直线移动。作为一个例子,接触清洗部22构成为,整体的直径为40mm,植设有多根树脂制的刷毛。另外,接触清洗部22并不限定于上述的结构,作为其他的例子,也可以采用在与工件w接触的接触部具备以pva(聚乙烯醇)等为材料的海绵的结构、或具备布状物(包括无纺布)的结构等。
25.根据该结构,利用洒水部21对工件w的规定面(上表面)进行洒水的同时,接触清洗部22在被旋转驱动的状态下在装置的左右方向即相对于工件w的搬运方向(装置的前后方向)以90度相交的方向往复移动。由此,能够在工件w的搬运中进行规定面(上表面)的清洗。作为一例,在工件w为直径200mm的晶片的情况下,一边将工件w保持于臂10并以规定速度移动,一边使接触清洗部22往复移动数次~10次左右,由此能够完成规定面(上表面)的清洗。
26.在以往的清洗装置中,通过静止状态(或旋转状态)的刷部相对于被旋转驱动的工件的半径移动来进行清洗,与此相对,根据上述结构,通过旋转状态的接触清洗部22相对于直线移动的工件w的直径往复移动,能够在搬运中进行清洗。因此,能够大幅缩短将搬运和清洗合在一起的处理时间(生产节拍时间),能够大幅提高使用工件w的制造工序中的制造效率。
27.另外,作为清洗机构20的变形例,接触清洗部22也可以构成为,代替相对于工件w的搬运方向在左右方向(呈90度的方向)上往复移动的结构,而在呈规定角度(例如接近90度的角度等)的方向上往复移动(未图示)。并且,作为其他变形例,接触清洗部22也可以构成为,代替被旋转驱动的结构而以规定的幅度进行振幅驱动(未图示)。根据这些变形例,也能够得到与上述同样的效果。
28.接着,清洗单元100b与上述清洗机构20分开(以与清洗机构20相邻的配置),具备对附着于进行了清洗后的工件w上的水进行去除的除水机构40。在该除水机构40设置有:载置工件w并使其旋转的工作台41;在将工件w载置于工作台41时使工件w的面中心与工作台41的旋转中心一致的定心部42;以及对载置于工作台41上的工件w进行洒水的洒水部44。这里,工作台41构成为与驱动源(作为一例为电动马达)43连结而以速度可变的方式被旋转驱动。作为一例,工作台41的旋转速度设定为最初的规定时间(作为一例,3秒钟)约为1000rpm以下,接下来的规定时间(作为一例为20秒钟)约为1000rpm~5000rpm。
29.根据该结构,一边利用洒水部44对工件w的规定面(上表面)进行洒水,一边进行基于旋转的干燥(旋转干燥)。由此,能够一边使工件w的规定面(上表面)上的污垢与水一起飞
溅,一边进行除水(干燥)。另外,此时,能够通过定心部42使工件w的面中心与工作台41的旋转中心一致,能够使工件w的旋转速度比以往的清洗装置高速化。因此,能够缩短从工件w上去除水的时间,能够缩短除水工序中的生产节拍时间。另外,工作台41具备阶段性地加快速度的结构,能够抑制在装置内产生激烈的水花,能够防止因水花的反弹而在工件w上再次附着尘埃。
30.如上所述,在专利文献1所例示的以往的清洗装置中,由于是利用一个旋转装置来实施清洗工序以及除水工序的结构,因此处理时间(生产节拍时间)变长,处于瓶颈阶段,成为无法提高制造效率的主要原因。与此相对,根据本实施方式的清洗机构20以及除水机构40的结构,构成为将清洗机构20以及除水机构40设置为分体机构,并且利用并列处理(并行处理)实施清洗工序以及除水工序,与以往装置相比,能够大幅缩短处理时间(生产节拍时间),能够大幅提高制造效率。
31.为了进一步提高该效果,在本实施方式中,具备以下的特征结构。具体而言,作为臂10,构成为并列设置有分别独立地进行工件w的搬运的第一臂10a和第二臂10b。另外,作为清洗机构20,构成为并列设置有对由第一臂10a进行搬运的工件w进行清洗的第一清洗机构20a、和对由第二臂10b进行搬运的工件w进行清洗的第二清洗机构20b。而且,作为除水机构40,构成为并列设置有对由第一清洗机构20a进行清洗的工件w进行除水的第一除水机构40a、和对由第二清洗机构20b进行清洗的工件w进行除水的第二水除水机构40b。由此,实现了在搬运中进行工件w的清洗的结构,并且实现了对该结构以两个系统并列设置的结构,并且,实现了在各个系统中对清洗工序和除水工序进行并列处理(并行处理)的结构,因此能够飞跃性地缩短将搬运、清洗以及除水合在一起的工序的处理时间(生产节拍时间),能够大幅提高制造效率。
32.这样,在清洗单元100b中,实现了如下结构:对在工件w的搬运中进行清洗并且并列(并行)地进行除水的机构以两个系统并列设置。另一方面,在供给单元100a中,实现了仅利用一个搬运机构(第一手部64)对具有两个系统的上述机构的清洗单元100b进行工件w的供给的结构。具体而言,构成为具备:载置部60,收纳有工件w的多个料盒62呈圆弧状载置于载置部60;以及第一手部64,其配设于呈圆弧状载置的多个料盒62的中心位置(成为该圆弧的中心的位置),从该料盒62取出工件w并交替地载置于第一臂10a上以及第二臂10b上。由此,在供给单元100a中无需设置多个搬运机构(手部等),能够通过简单的机构进行工件w的供给,因此能够抑制装置成本。而且,能够均等且迅速地进行工件w向两个系统的清洗机构20a、20b的供给,因此能够在不延长生产节拍时间的情况下缩短工序时间。
33.接着,对工件清洗装置100的后处理单元100c的结构进行详细说明。
34.如上所述,后处理单元100c具备把持工件并将其搬运至固定板上的搬送机构(未图示)。该搬运机构作为进行上下方向移动的机构,与和由伺服马达旋转驱动的滚珠丝杠螺合的滑动器连结。由此,由于以往的清洗装置中的搬运机构是借助气缸进行上下方向移动的机构,因此存在移动时间(生产节拍时间)变长的课题,与此相对,在本实施方式中,借助电动化、即使用了伺服马达、滚珠丝杠、滑动器的机构,能够缩短移动时间(生产节拍时间),能够提高制造效率。
35.如以上说明的那样,根据本发明的工件清洗装置100,能够实现进行平板状工件的搬运、清洗以及除水的工序中的总计的处理时间的缩短。因此,例如,在该工件是用于半导
体装置的制造的硅晶片的情况下,在半导体装置的制造工序中,能够实现基于生产节拍时间的缩短带来的制造效率的提高。
36.此外,本发明并不限定于以上说明的实施例,在不脱离本发明的范围内能够进行各种变更。特别是作为工件以晶片为例进行了说明,但并不限定于此,对于其他平板状(特别是圆板状)的工件也能够同样地适用。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1