一种抓取牢固的节能型芯片拾取机器人的制作方法
1.本发明涉及机器人领域,具体的是一种抓取牢固的节能型芯片拾取机器人。
背景技术:
2.抓取牢固的节能型芯片拾取机器人主要是用于对芯片进行抓取转移的设备,通过抓取牢固的节能型芯片拾取机器人前端的夹持器能够对目标芯片进行夹持,再通过联动架带动夹持器转移,从而使芯片能够被夹持器带动转移,但在现有技术中,由于抓取牢固的节能型芯片拾取机器人的夹持器内侧是平面的,以至于夹持器在对圆形芯片进行夹持时会出现圆形芯片边侧与夹持器内侧的接触面积减小,从而使圆形芯片在被夹持的过程中容易出现翻转的现象,故而导致后期还需人工对芯片进行翻转,使其正面朝上以便于安装使用。
技术实现要素:
3.针对上述问题,本发明提供一种抓取牢固的节能型芯片拾取机器人。
4.为了实现上述目的,本发明是通过如下的技术方案来实现:一种抓取牢固的节能型芯片拾取机器人,其结构包括联动杆、支撑杆、底座、夹持机构,所述支撑杆的底部与底座的上端相焊接,所述联动杆与支撑杆的上端相连接,所述夹持机构安装于联动杆的前端位置;所述夹持机构包括连接杆、衔结块、夹持板,所述衔结块的顶部与连接杆底部嵌固连接,所述夹持板安装于衔结块活动卡合。
5.作为本发明的进一步改进,所述衔结块包括衔接块、固定块、弹力片、伸缩块,所述固定块的顶部与衔接块底部相连接,所述弹力片安装于固定块的底部位置,所述伸缩块与弹力片的底部相连接,通过弹力片对伸缩块产生持续的推力,能够使伸缩块在失去物体内壁挤压时向下伸出。
6.作为本发明的进一步改进,所述伸缩块包括结合块、吸盘、固定杆,所述结合块嵌入于固定杆的内部位置,所述吸盘的上表面与结合块的底部相贴合,所述吸盘采用易变形易复原聚氯乙烯材质。
7.作为本发明的进一步改进,所述吸盘包括弹片、保护块、衔固板,所述弹片嵌固于衔固板的内侧位置,所述保护块安装于弹片的下端位置,所述保护块采用质地柔软的天然乳胶材质。
8.作为本发明的进一步改进,所述结合块包括受力块、打底板、施压块,所述打底板的上表面与受力块的底部相贴合,所述施压块安装于受力块的内部位置,所述施压块采用密度较大的合金钢材质。
9.作为本发明的进一步改进,所述夹持板包括板体、活动轮、内触板,所述活动轮与内触板内壁活动卡合,所述内触板的内侧与板体相贴合,所述活动轮设有两个,且均匀的在两个内触板的内侧呈对称分布。
10.作为本发明的进一步改进,所述活动轮包括导杆、中心块、轮体,所述中心块与导杆的内部活动卡合,所述轮体与中心块为一体化结构,通过物体对轮体产生的挤压,能够使
轮体在中心块的配合下沿着导杆进行转动。
11.作为本发明的进一步改进,所述轮体包括中接块、抓力槽、弹性环、接触环,所述中接块安装于弹性环的内部位置,所述抓力槽嵌入于接触环的内部位置,所述弹性环与接触环的内侧相贴合,所述抓力槽设有八个,且均匀的在接触环上呈圆形分布。
12.本发明具有如下有益效果:
13.1、通过夹持机构上的夹持板能够对圆形芯片的边侧进行夹持,并且夹持板沿着衔结块摆动展开后,通过弹力片推动伸缩块的底部与圆形芯片的上表面相贴合,再通过圆形芯片对吸盘产生的反推力,能够使吸盘对圆形芯片的上表面产生吸力,从而使圆形芯片能够被吸盘的底部吸附住,故而能够避免圆形芯片在两个夹持板之间翻转的情况。
14.2、通过夹持板闭合后伸缩块边侧产生对活动轮产生的反推力,能够使轮体沿着导杆向内滑动收缩,并且通过伸缩块对轮体产生的持续推力,能够使进行转动,从而使伸缩块能够被轮体带动向上滑动收缩,故而使两个夹持板能够顺利闭合,有效的避免了夹持板闭合后伸缩块会被卡在两个夹持板之间难以复位的情况。
附图说明
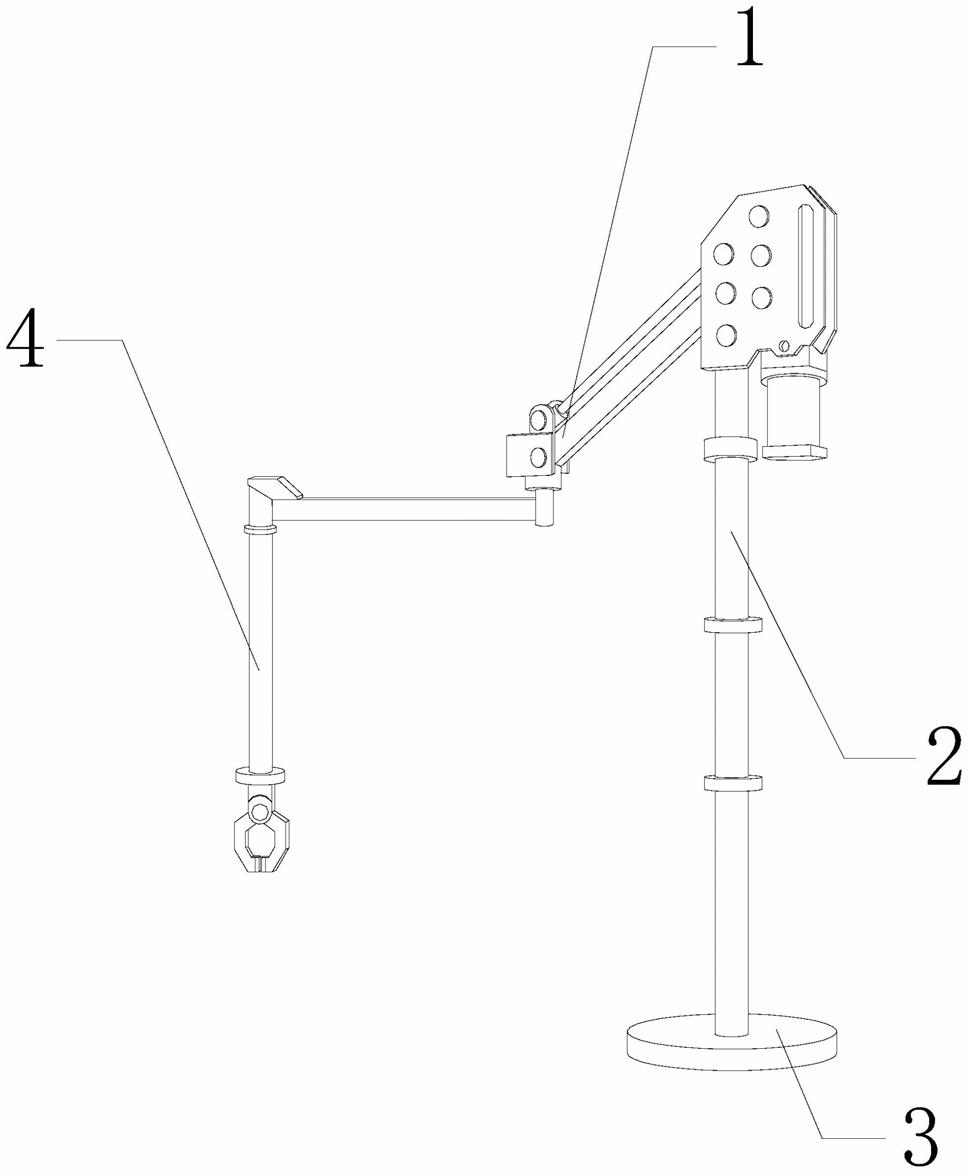
15.图1为本发明一种抓取牢固的节能型芯片拾取机器人的结构示意图。
16.图2为本发明夹持机构侧视半剖面的结构示意图。
17.图3为本发明衔结块侧视半剖面的结构示意图。
18.图4为本发明夹持板闭合伸缩块状态侧视的结构示意图。
19.图5为本发明伸缩块侧视半剖面的结构示意图。
20.图6为本发明伸缩块与圆形芯片上表面相贴合的侧视结构示意图。
21.图7为本发明吸盘侧视半剖面的结构示意图。
22.图8为本发明吸盘与圆形芯片上表面相贴合的侧视结构示意图。
23.图9为本发明结合块侧视半剖面的结构示意图
24.图10为本发明夹持板侧视半剖面的结构示意图
25.图11为本发明夹持板闭合侧视的结构示意图
26.图12为本发明活动轮侧视半剖面的结构示意图
27.图13为本发明活动轮与伸缩块相贴合的结构示意图
28.图14为本发明轮体侧视半剖面的结构示意图
29.图中:联动杆-1、支撑杆-2、底座-3、夹持机构-4、连接杆-41、衔结块-42、夹持板-43、衔接块-a1、固定块-a2、弹力片-a3、伸缩块-a4、结合块-a41、吸盘-a42、固定杆-a43、弹片-b1、保护块-b2、衔固板-b3、受力块-c1、打底板-c2、施压块-c3、板体-d1、活动轮-d2、内触板-d3、导杆-d21、中心块-d22、轮体-d23、中接块-e1、抓力槽-e2、弹性环-e3、接触环-e4。
具体实施方式
30.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
31.实施例1
32.如图1至图9所示:
33.本发明提供一种抓取牢固的节能型芯片拾取机器人,其结构包括联动杆1、支撑杆2、底座3、夹持机构4,所述支撑杆2的底部与底座3的上端相焊接,所述联动杆1与支撑杆2的上端相连接,所述夹持机构4安装于联动杆1的前端位置;所述夹持机构4包括连接杆41、衔结块42、夹持板43,所述衔结块42的顶部与连接杆41底部嵌固连接,所述夹持板43安装于衔结块42活动卡合。
34.其中,所述衔结块42包括衔接块a1、固定块a2、弹力片a3、伸缩块a4,所述固定块a2的顶部与衔接块a1底部相连接,所述弹力片a3安装于固定块a2的底部位置,所述伸缩块a4与弹力片a3的底部相连接,通过弹力片a3对伸缩块a4产生持续的推力,能够使伸缩块a4在失去物体内壁挤压时向下伸出,从而使伸缩块a4的底部能够与圆形芯片的上表面相贴合。
35.其中,所述伸缩块a4包括结合块a41、吸盘a42、固定杆a43,所述结合块a41嵌入于固定杆a43的内部位置,所述吸盘a42的上表面与结合块a41的底部相贴合,所述吸盘a42采用易变形易复原聚氯乙烯材质,通过吸盘a42能够吸附在圆形芯片的上表面位置。
36.其中,所述吸盘a42包括弹片b1、保护块b2、衔固板b3,所述弹片b1嵌固于衔固板b3的内侧位置,所述保护块b2安装于弹片b1的下端位置,所述保护块b2采用质地柔软的天然乳胶材质,通过保护块b2能够对圆形芯片与其接触的区域进行保护。
37.其中,所述结合块a41包括受力块c1、打底板c2、施压块c3,所述打底板c2的上表面与受力块c1的底部相贴合,所述施压块c3安装于受力块c1的内部位置,所述施压块c3采用密度较大的合金钢材质,通过施压块c3能够增强受力块c1的整体重量,从而使物体更容易对圆形芯片进行吸附。
38.本实施例的详细使用方法与作用:
39.本发明中,通过联动杆1带动夹持机构4进行转动方位,再通过夹持机构4上的夹持板43能够对圆形芯片的边侧进行夹持,并且夹持板43沿着衔结块42摆动展开后,通过弹力片a3推动伸缩块a4的底部与圆形芯片的上表面相贴合,再通过圆形芯片对吸盘a42产生的反推力,能够使吸盘a42对圆形芯片的上表面产生吸力,从而使圆形芯片能够被吸盘a42的底部吸附住,并且通过施压块c3能够增大受力块c1的整体重量,从而使结合块a41能够推动衔固板b3与圆形芯片上表面贴合的更加紧密,故而能够避免圆形芯片在两个夹持板43之间翻转的情况,并且通过弹片b1能够带动保护块b2对圆形芯片产生持续推力,能够使圆形芯片在失去两个夹持板43夹持时更易与衔固板b3分离,并且通过保护块b2能够对与圆形芯片接触的去区域进行保护。
40.实施例2
41.如图10-图14所示:
42.其中,所述夹持板43包括板体d1、活动轮d2、内触板d3,所述活动轮d2与内触板d3内壁活动卡合,所述内触板d3的内侧与板体d1相贴合,所述活动轮d2设有两个,且均匀的在两个内触板d3的内侧呈对称分布,通过活动轮d2能够减小内触板d3与物体的接触面积。
43.其中,所述活动轮d2包括导杆d21、中心块d22、轮体d23,所述中心块d22与导杆d21的内部活动卡合,所述轮体d23与中心块d22为一体化结构,通过物体对轮体d23产生的挤压,能够使轮体d23在中心块d22的配合下沿着导杆d21进行转动,从而使导杆d21能够带动
物体向上进行收缩。
44.其中,所述轮体d23包括中接块e1、抓力槽e2、弹性环e3、接触环e4,所述中接块e1安装于弹性环e3的内部位置,所述抓力槽e2嵌入于接触环e4的内部位置,所述弹性环e3与接触环e4的内侧相贴合,所述抓力槽e2设有八个,且均匀的在接触环e4上呈圆形分布,通过抓力槽e2能够增强接触环e4对物体表面的抓力。
45.本实施例的详细使用方法与作用:
46.本发明中,由于伸缩块a4是受弹力片a3推动向下伸出的,以至于夹持板43闭合后伸缩块a4会被卡在两个夹持板43之间难以复位,通过夹持板43闭合后伸缩块a4边侧产生对活动轮d2产生的反推力,能够使轮体d23沿着导杆d21向内滑动收缩,并且通过伸缩块a4对轮体d23产生的持续推力,能够使a21进行转动,再通过橡胶材质的接触环e4能够配合抓力槽e2增强对伸缩块a4边侧表面的抓力,从而使伸缩块a4能够被轮体d23带动向上滑动收缩,故而使两个夹持板43能够顺利闭合,有效的避免了夹持板43闭合后伸缩块a4会被卡在两个夹持板43之间难以复位的情况。
47.利用本发明所述技术方案,或本领域的技术人员在本发明技术方案的启发下,设计出类似的技术方案,而达到上述技术效果的,均是落入本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1