输送装置的制作方法
1.本发明涉及一种输送装置。
背景技术:
2.专利文献1中公开了对基片进行处理的基片处理装置和处理方法。作为装置结构的一个例子,公开了使搭载有处理模块的2个传送模块连结来进行基片处理的结构。另外,专利文献1中公开了设置旋转模块(旋转机构),根据需要使基片旋转的技术。
3.现有技术文献
4.专利文献
5.专利文献1:美国专利第10431480号说明书
技术实现要素:
6.发明要解决的技术问题
7.本发明的技术提供一种输送装置,其能够在通过将真空输送模块连结而在真空输送系统中增加处理模块的最大搭载数量的情况下,抑制与真空输送模块的连结相伴的占地面积(footprint)的增大,并且在输送时使基片的缺口方向一致。
8.用于解决技术问题的手段
9.本发明的一个方式提供一种输送装置,其包括:第一真空输送模块;配置在所述第一真空输送模块内的第一输送机器人,其能够同时或分别输送晶片和至少1个环部件,所述至少1个环部件具有比所述晶片的直径大的内径;第二真空输送模块;配置在所述第二真空输送模块内的第二输送机器人,其能够同时或分别输送所述晶片和所述至少1个环部件;配置在所述第一真空输送模块与所述第二真空输送模块之间的筒状连结模块,所述第一真空输送模块、所述第二真空输送模块和所述筒状连结模块沿着第一方向排列,所述筒状连结模块在所述第一方向上具有第一长度,所述第一长度小于所述晶片的直径;可旋转地安装在所述筒状连结模块上的晶片支承部,其能够支承所述晶片;和从所述晶片支承部向外侧延伸的至少3个环支承部件,其能够支承所述至少1个环部件。
10.发明效果
11.采用本发明,能够在通过将真空输送模块连结而在真空输送系统中增加处理模块的最大搭载数量的情况下,抑制与真空输送模块的连结相伴的占地面积的增大,并且在输送时使基片的缺口方向一致。
附图说明
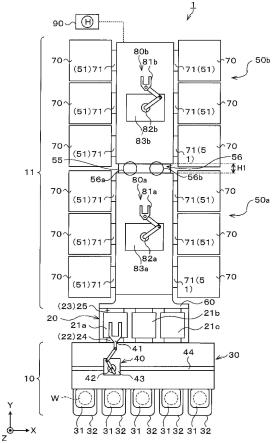
12.图1是表示本实施方式的晶片处理装置的结构的概要的平面图。
13.图2是示意性地表示本实施方式的模块的结构的概要的纵截面图。
14.图3是示意性地表示本实施方式的通路模块的结构的概要的立体图。
15.图4是表示旋转机构的结构的一个例子的概略说明图。
16.图5是表示在旋转机构中在边缘环支承面上载置有直径不同的2种边缘环的状态的概略说明图。
17.附图标记说明
18.1晶片处理装置,50传送模块,55通路模块,56a、56b旋转机构,80a第一输送机构,80b第二输送机构,105基片支承部,108边缘环支承部,w晶片。
具体实施方式
19.在半导体器件的制造工艺中,使收纳有半导体晶片(下面,简称为“晶片”)的处理模块的内部成为减压(真空)状态,对该晶片进行各种处理工序。这些处理工序在具有多个处理模块的基片处理装置(下面,也记载为晶片处理装置)中进行。
20.该晶片处理装置例如具有:大气部,其包括用于在大气气氛下对晶片实施期望的处理的大气模块;减压部(真空部),其包括用于在减压(真空)气氛下对晶片进行处理的减压(真空)模块。大气部和减压部(真空部)经由能够将内部切换为大气气氛和减压(真空)气氛的负载锁定模块连接为一体。
21.然而,在设计晶片处理装置时,如专利文献1所公开的那样,从使用者的需求和晶片处理的高效率化的观点出发,存在要求搭载更多的处理模块的情况。
22.但是,鉴于削减晶片处理装置的占地面积、限制输送臂长度、提高晶片处理装置中的生产率等各种技术问题,对于增加处理模块的情况下的优选的装置设计,有进一步研究的余地。例如,当在真空输送系统中搭载更多的处理模块的情况下,设置用于使已有的真空输送模块连结的通路模块是一个方案,但是与此时的通路模块搭载相伴的占地面积的增加、与通路模块中的晶片的交接相伴的缺口方向的偏移等成为技术问题。
23.本发明的技术是鉴于上述情况而完成的,提供一种具有能够抑制占地面积增大、并且在输送时能够使晶片的缺口方向一致的通路模块的结构的输送装置。下面,参照附图对本实施方式的作为输送装置的晶片处理装置进行说明。在本说明书和附图中,对于具有实质上相同的功能构成的要素,通过标注相同的附图标记来省略重复说明。
24.<晶片处理装置的结构>
25.首先,对本实施方式的晶片处理装置进行说明。图1是表示本实施方式的晶片处理装置1的结构的概要的平面图。在本实施方式中,对晶片处理装置1包括用于对作为基片的晶片w进行蚀刻处理、成膜处理或扩散处理等的等离子体处理的处理模块的情况进行说明。此外,本发明的晶片处理装置1的模块结构并不限于此,可以与晶片处理的目的相应地任意选择。
26.如图1所示,晶片处理装置1具有大气部10和减压部(真空部)11经由负载锁定模块20连接为一体的结构。大气部10包括用于在大气气氛下对晶片w进行处理和输送的大气模块。减压部(真空部)11包括用于在减压(真空)气氛下对晶片w进行处理和输送的减压模块(真空模块)。
27.负载锁定模块20沿着后述的装载模块30和后述的适配模块(fitting module)60的宽度方向(x轴方向)具有多个晶片输送室,在本实施方式中例如具有3个晶片输送室21a、21b、21c。
28.作为基片输送室的晶片输送室21a、21b、21c(下面,有时将它们一并简称为“晶片
输送室21”),被设置成经由晶片输送口22、23将大气部10的后述的装载模块30的内部空间与减压部11的后述的第一传送模块50a的内部空间连通。此外,晶片输送口22、23分别可通过闸阀24、25进行开关。
29.晶片输送室21能够暂时保持晶片w。另外,晶片输送室21能够将内部切换为大气气氛和减压气氛(真空状态)。即,负载锁定模块20能够在大气气氛的大气部10与减压气氛的减压部11之间适当地进行晶片w的交接。
30.大气部10具有:装载模块30,其包括后述的晶片输送机构40;和装载端口32,其用于载置能够保管多个晶片w的前开式晶片传送盒31。此外,可以与装载模块30相邻地设置有用于对晶片w的水平方向的朝向进行调节的取向模块(未图示)和/或用于收纳多个晶片w的收纳模块(未图示)等。
31.装载模块30的内部由矩形的壳体构成,壳体的内部被维持为大气气氛。在装载模块30的构成y轴负方向侧的长边的一个侧面,排列配置有多个例如5个装载端口32。在装载模块30的构成y轴正方向侧的长边的另一个侧面,排列配置有负载锁定模块20的晶片输送室21a、21b、21c。
32.在装载模块30的内部设置有用于对晶片w进行输送的晶片输送机构40。晶片输送机构40包括:输送臂41,其能够保持晶片w并移动;旋转台42,其能够可旋转地支承输送臂41;和旋转载置台43,其用于搭载旋转台42。另外,在装载模块30的内部,设置有在装载模块30的长度方向(x轴方向)上延伸的导轨44。旋转载置台43设置在导轨44上,晶片输送机构40能够沿着导轨44移动。
33.减压部11具有:能够在内部输送晶片w的2个传送模块(真空输送模块)50a、50b(下面,也记载为第一传送模块(第一真空输送模块)50a和第二传送模块(第二真空输送模块)50b);用于将2个传送模块50a、50b彼此相互连接的通路模块(筒状连结模块)55;用于将负载锁定模块20与第一传送模块50a相互连接的适配模块60;和用于对从传送模块50a、50b输送的晶片w进行处理的处理模块70。传送模块50a、50b、适配模块60和处理模块70的内部能够分别被维持为减压(真空)气氛。此外,在本实施方式中,1个传送模块50a(或50b)连接有多个例如6个处理模块70。此外,处理模块70的数量和配置并不限于本实施方式,可以任意地设定。
34.作为真空输送模块的第一传送模块50a,如上所述经由适配模块60与负载锁定模块20连接。第一传送模块50a和第二传送模块50b,例如在将被送入到负载锁定模块20的晶片输送室21a中的晶片w输送到1个或多个处理模块70进行处理之后,将该晶片w经由负载锁定模块20的晶片输送室21c输送到大气部10。
35.在第一传送模块50a的内部,设置有作为用于输送晶片w的第一输送机构的第一晶片输送机构(第一输送机器人)80a。第一晶片输送机构80a包括:输送臂81a,其能够保持晶片w并移动;旋转台82a,其能够可旋转地支承输送臂81a;和旋转载置台83a,其用于搭载旋转台82a。旋转载置台83a被固定在第一传送模块50a的中央部分。在一个实施方式中,第一输送机器人80a配置在第一真空输送模块50a内,能够同时或分别输送晶片w和至少1个环部件er1。环部件er1具有比晶片w的直径大的内径。在一个实施方式中,至少1个环部件可以包括多个环部件er1、er2。各个环部件er1、er2具有比晶片w的直径大的内径。在该情况下,第一输送机器人80a可以是同时输送多个环部件er1、er2,也可以是分别输送多个环部件er1、
er2。在一个实施方式中,多个环部件er1、er2为在等离子体处理模块70内一起使用的边缘环。多个边缘环er1、er2在等离子体处理模块70内以包围晶片w的方式配置。在一个实施方式中,多个边缘环er1、er2包括第一边缘环er1和第二边缘环er2,第二边缘环er2的外径大于第一边缘环er1的外径。在一个实施方式中,第一边缘环er1由si材料或sic材料制作,第二边缘环er2由石英制作。此外,可以是第一边缘环er1和第二边缘环er2由相同的材料制作。例如,可以是第一边缘环er1和第二边缘环er2由石英制作。
36.在第二传送模块50b的内部,设置有作为用于输送晶片w的第二输送机构的第二晶片输送机构(第二输送机器人)80b。第二晶片输送机构80b具有与上述第一晶片输送机构80a同样的功能构成,设置有输送臂81b、旋转台82b、旋转载置台83b等机构。在一个实施方式中,第二输送机器人80b配置在第二真空输送模块50b内,能够同时或分别输送晶片w和至少1个环部件er1。在至少1个环部件包括多个环部件er1、er2的情况下,第二输送机器人80b可以是同时输送多个环部件er1、er2,也可以是分别输送多个环部件er1、er2。
37.处理模块70用于对晶片w进行例如蚀刻处理、成膜处理或扩散处理等的等离子体处理。处理模块70可以任意地选择用于进行与晶片处理的目的相应的处理的模块。另外,处理模块70经由在各传送模块50a、50b的侧壁面上形成的晶片输送口51与各传送模块50a、50b连通,晶片输送口51可使用闸阀71进行开关。
38.在上述的晶片处理装置1中,如图1所示,设置有控制部90。控制部90例如是包括cpu和存储器等的计算机,具有程序存储部(未图示)。在程序存储部中存储有用于对晶片处理装置1中的晶片w的输送和处理进行控制的程序。此外,上述程序也可以是被记录在计算机可读取的存储介质h中,从该存储介质h被安装到控制部90中。
39.<各模块的结构>
40.本实施方式的晶片处理装置1如上述那样构成。接下来,对各模块的详细结构进行说明。图2是示意性地表示负载锁定模块20、适配模块60、第一传送模块50a、第二传送模块50b、通路模块55的结构的概要的纵截面图。
41.负载锁定模块20具有沿着适配模块60的宽度方向(x轴方向)排列配置的3个晶片输送室21a、21b、21c。在3个晶片输送室21各自上形成有:用于在与装载模块30之间进行晶片w的交接的晶片输送口22;和用于在与第一传送模块50a之间进行晶片w的交接的晶片输送口23。换言之,在负载锁定模块20的y轴负方向侧和正方向侧的侧壁上分别各形成有3个晶片输送口22、23。
42.负载锁定模块20的晶片输送室21经由闸阀24、闸阀25与装载模块30和第一传送模块50a连接。利用该闸阀24、25,能够进行晶片输送室21与装载模块30或传送模块50a、50b之间的气密性的确保和彼此的连通这两者。
43.如图2所示,在晶片输送室21中设置有储料器(stocker)26,其用于暂时保持在装载模块30与传送模块50a、50b之间输送的晶片w。
44.另外,如图2所示,供气部27和排气部28与负载锁定模块20连接,其中,供气部27用于向晶片输送室21的内部供给气体,排气部28用于排出气体。负载锁定模块20能够利用这些供气部27和排气部28将晶片输送室21的内部切换为大气气氛和减压气氛。
45.在第一传送模块50a的与适配模块60连接的y轴负方向侧的一个端部,形成有用于在与适配模块60之间进行晶片w的输送的开口部52。另外,第一传送模块50a的y轴正方向侧
的另一个端部,经由通路模块55与第二传送模块50b连接。换言之,第二传送模块50b的y轴负方向侧的一个端部经由通路模块55与第一传送模块50a连接,第二传送模块50b的y轴正方向侧的另一个端部被作为板状部件的端板53封闭。
46.如上所述,在传送模块50a、50b、通路模块55、适配模块60之间,如图示那样没有设置板状部件或闸阀。即,传送模块50a、50b、通路模块55、适配模块60的内部空间连通,划分出可由第一晶片输送机构80a和第二晶片输送机构80b输送晶片w的一体的输送空间s。
47.如上所述,在传送模块50a、50b的构成长边的x轴负方向侧和正方向侧的侧面上,形成有与处理模块70连通的多个晶片输送口51。晶片输送口51可使用闸阀71进行开关。
48.另外,用于向输送空间s供给不活泼气体(例如n2气体)的气体供给部54,与晶片输送口51的上方的传送模块50a、50b的顶面连接。该气体供给部54能够对输送空间s供给不活泼气体,使得将晶片输送口51遮断,使得形成所谓的气幕,抑制在闸阀71打开时颗粒等从处理模块70向传送模块50a、50b飞散。
49.另外,气体供给部54能够向输送空间s的内部供给不活泼气体,使得能够将输送空间s的内部的气流的滞留部分消除,并利用与适配模块60连接的排气机构(未图示)适当地对输送空间s的内部进行排气。
50.<通路模块的结构>
51.如上所述,通路模块55用于将第一传送模块50a和第二传送模块50b相互连接。通路模块55的内部与第一传送模块50a和第二传送模块50b的内部在空间上连通,在输送晶片w时处于减压气氛下。图3是示意性地表示通路模块55的结构的概要的立体图。此外,在图3中,图示了晶片w由晶片输送机构80a(输送臂81a)输送到通路模块55内的状态。
52.如图1、2所示,负载锁定模块20、适配模块60、第一传送模块50a、通路模块55、第二传送模块50b从y轴负方向侧起依次排列并连接。
53.另外,如图3所示,通路模块55由具有第一开口55a和第二开口55b的筒型形状构成,其中,第一开口55a形成在与第一传送模块50a连接的(y轴负方向侧)一个侧面上,第二开口55b形成在与第二传送模块50b连接的(y轴正方向侧)另一个侧面上。
54.在本实施方式的通路模块55中,第一开口55a和第二开口55b均具有能够在通路模块55与各传送模块50a、50b之间适当地进行晶片w的输送的大小。
55.另外,通路模块55的y轴方向上的进深尺寸h1设计成小于晶片w的直径(基片尺寸)。但是,通路模块55的进深尺寸h1设计成能够设置构成后述的交接部56的旋转机构56a、56b的程度的尺寸。另外,该通路模块55的进深尺寸h1可以基于在通路模块55的附近相互相邻的处理模块70彼此的间隙(间隔)来设计。例如,从装置整体的占地面积的观点出发,相邻的处理模块70彼此的间隔为10mm左右,通路模块55的进深尺寸h1可基于该数值来设计。因此,筒状连结模块55配置在第一真空输送模块50a与第二真空输送模块50b之间。第一真空输送模块50a、第二真空输送模块50b和筒状连结模块55沿着第一方向y排列。筒状连结模块55在第一方向y上具有第一长度h1。
56.第一长度h1小于晶片w的直径。
57.如图1所示,在通路模块55中,设置有用于在第一传送模块50a与第二传送模块50b之间进行晶片w的交接的交接部56。如图1所示,本实施方式的交接部56包括2个旋转机构(晶片支承部)56a、56b,这些旋转机构56a、56b在通路模块55的宽度方向(x轴方向)上排列
配置。
58.图4是表示旋转机构56a、56b的结构的一个例子的概略说明图。在此,以旋转机构56a为例进行了图示,但是旋转机构56b也具有同样的结构。如图4所示,旋转机构56a包括:内部具有驱动轴的轴部件100;设置在轴部件100的上端的具有基片支承面(晶片支承面)105a的基片支承部(晶片载置台)105;和在基片支承部105的外周具有向外方延伸的至少3个以上的棒状的保持部件(环支承部件)107的边缘环支承部108。在图4的结构中,3个保持部件107a、107b、107c在基片支承部105的外周以120
°
间隔设置。
59.基片支承部105分别与轴部件100内部具有的驱动轴(未图示)连接,可随着驱动轴的驱动而旋转。基片支承部105优选设计成收纳在通路模块55内。另外,边缘环支承部108可以是不旋转的结构,或者,也可以是与基片支承部105同样地与驱动轴连接且可旋转。作为结构的一个例子,基片支承部105和边缘环支承部108可以是一体地旋转,或者也可以是彼此独立地旋转。此外,基片支承部105和/或边缘环支承部108可以是相对于轴部件100可拆装。通过使基片支承部105和/或边缘环支承部108可拆装,能够实现装置的搬运、捆包时的高效率化。
60.在基片支承部105的基片支承面105a上,能够利用例如o形环等卡止部件将晶片w固定并进行载置。该基片支承面105a可以是直径比晶片w的直径小的圆板状的部件,鉴于要在与输送臂81a、81b之间进行晶片w的交接,其尺寸优选设计成小于输送臂81a、81b的叉形部宽度。因此,晶片支承部56a、56b可旋转地安装在筒状连结模块55上,能够支承晶片w。晶片支承部56a包括晶片载置台105和轴部件100。晶片载置台105具有晶片支承面105a。晶片支承面105a具有比第一长度h1小的直径。轴部件100从晶片载置台105向下方延伸。晶片支承部56b也具有与晶片支承部56a相同的结构。
61.在保持部件107的外侧前端可以形成具有向上方突出的形状的边缘环支承面109。基片支承面105a和边缘环支承面109可以为相同的高度水平,也可以为不同的高度水平。因此,至少3个环支承部件107a、107b、107c从晶片支承部56a向外侧延伸,能够一起支承至少1个环部件er1。在至少1个环部件包括多个环部件er1、er2的情况下,至少3个环支承部件107a、107b、107c能够一起支承多个环部件er1、er2。至少3个环支承部件107a、107b、107c包括第一环支承部件107a和第二环支承部件107b。在一个实施方式中,第一环支承部件107a延伸至第一真空输送模块50a的内部,第二环支承部件107b延伸至第二真空输送模块50b的内部。至少3个环支承部件107a、107b、107c可以能够旋转。在一个实施方式中,各环支承部件107a、107b、107c包括棒状部分和突出部分。棒状部分的一个端部被安装在轴部件100上。突出部分从棒状部分的另一个端部向上方突出,在突出部分的上端部具有环支承面109。另外,优选边缘环支承面109在旋转机构56a的径向上具有某种程度的宽度。这是为了在边缘环支承面109上支承作为边缘环er的直径不同的2种环部件(例如聚焦环fr和覆盖环cr)并使其旋转。
62.图5是表示在旋转机构56a、56b中,在边缘环支承面109上载置有直径不同的2种边缘环er1、er2的状态的概略说明图。依照本实施方式的结构,如图5所示,能够在边缘环支承面109上同时支承直径不同的2种边缘环er1、er2,进行保持和/或旋转。
63.聚焦环fr是指用于在晶片w的周围进行对位的例如硅制的部件,覆盖环cr是指覆盖聚焦环fr的外侧的例如石英制的部件。边缘环er是指在对晶片w进行等离子体处理的情
况下,以包围该晶片w的周围的方式配置的环状部件,在此,是上述聚焦环fr和覆盖环cr的总称。
64.如上所述,基片支承部105的尺寸优选设计成小于通路模块55的进深尺寸h1。另一方面,边缘环支承部108的包括保持部件107(107a~107c)在内的整体的尺寸可以设计成大于通路模块55的进深尺寸h1,在该情况下,保持部件107的前端可以延伸至各传送模块50a、50b的内部。
65.<晶片的交接方法>
66.接下来,对在本实施方式的晶片处理装置1中,经由通路模块55的晶片w的交接方法的一个例子进行说明。例如,当对同一晶片w在设置在第一传送模块50a的侧面的处理模块70中进行第一基片处理之后,要在设置在第二传送模块50b的侧面的另一个处理模块70中进行第二基片处理的情况下,需要将该晶片w从第一传送模块50a交接到第二传送模块50b。
67.首先,在设置在第一传送模块50a的侧面的处理模块70中进行第一基片处理之后,利用第一晶片输送机构80a(输送臂81a)将晶片w从处理模块70取出,将晶片w载置在通路模块55内的旋转机构56a、56b中的任一者的基片支承部105上。
68.然后,在晶片w被载置在基片支承部105上的状态下,通过轴部件100内部具有的驱动轴的驱动,使基片支承部105与晶片w一体地旋转规定的角度。在旋转结束后,利用第二晶片输送机构80b(输送臂81b)从基片支承部105取出晶片w。将晶片w直接利用第二晶片输送机构80b输送到设置在第二传送模块50b的侧面的处理模块70内。然后,在设置在第二传送模块50b的侧面的处理模块70中进行第二基片处理。因此,控制部90控制第一输送机器人80a以使得将晶片w载置在晶片支承部56a上。接着,控制部90控制晶片支承部56a以使得晶片支承部56a上的晶片w旋转规定的角度。之后,控制部90控制第二输送机器人80b以使得将晶片支承部56a上的晶片w输送到第二真空输送模块50b内。
69.当在半导体器件的制造工艺中输送多个晶片w的情况下,从工艺特性和量产性的观点出发,期望在处理模块70内以晶片w一律朝向相同的方向的方式进行输送。因此,期望在利用第一晶片输送机构80a(输送臂81a)进行输送时和利用第二晶片输送机构80b(输送臂81b)进行输送时,均对输送进行控制以使得在输送目的地的处理模块70中晶片w一律朝向相同的方向。
70.从这样的观点出发,在晶片w的规定的部位形成有缺口(切口),当在基片处理时将晶片w输送至处理模块70时,要求进行控制以使得通过使晶片w的缺口方向一致,在处理模块70内晶片w一律朝向相同的方向。本实施方式的晶片处理装置1具有第一传送模块50a和第二传送模块50b经由通路模块55连接的结构。根据对晶片w的基片处理的内容的不同,需要将同一晶片w输送至多个处理模块70,此时,要求经由通路模块55进行输送。
71.依照本实施方式的构成,通过在晶片w输送时经由的通路模块55中设置旋转机构56a、56b,能够在从第一晶片输送机构80a向第二晶片输送机构80b交接晶片w时使晶片w旋转规定的角度进行交接。由此,能够以在输送目的地的处理模块70内晶片w的缺口方向一律朝向相同的方向的方式输送晶片w,能够实现基片处理的均匀化和生产率的提高。
72.此外,在此对晶片w的交接方法进行了说明,但是本发明的应用范围并不限于此。即,在像本实施方式的晶片处理装置1那样,在处理模块70中对晶片w进行等离子体处理的
情况下,也可以构成为能够在真空输送部中输送边缘环er。如上所述,旋转机构56a、56b包括用于支承边缘环er的边缘环支承部108。因此,与输送晶片w时同样,在输送边缘环er时也能够使该边缘环er旋转并以期望的朝向输送至处理模块70。因此,控制部90控制第一输送机器人80a以使得将至少1个环部件er1、er2载置在至少3个环支承部件107a、107b、107c上。然后,控制部90控制第二输送机器人80b以使得将至少3个环支承部件107a、107b、107c上的至少1个环部件er1、er2输送至第二真空输送模块50b内。
73.依照本实施方式的晶片处理装置1,在与各种要求相应地在1个真空输送系统中搭载更多的处理模块70的情况下,使用了进深尺寸极小的(具体而言为晶片w的直径以下的)通路模块55来使已有的真空输送模块(传送模块50a、50b)连结。由此,能够在增加处理模块70的最大搭载数量时抑制占地面积的增大。
74.另外,依照本实施方式的晶片处理装置1,在为了增加处理模块70的最大搭载数量而将第一传送模块50a和第二传送模块50b经由通路模块55连接的结构中,在用于进行晶片w的交接的通路模块55中设置有旋转机构56a、56b。由此,例如在将同一晶片w从第一晶片输送机构80a交接到第二晶片输送机构80b时,能够使晶片w旋转期望的角度进行交接。即,能够以在输送目的地的处理模块70内晶片w的缺口方向一律朝向相同的方向的方式输送晶片w,能够实现生产率提高等。
75.本次公开的实施方式在所有方面均应认为是例示性的而不是限制性的。上述的实施方式在不脱离所附的权利要求书及其主旨的情况下,可以以各种形式省略、替换、变更。
76.例如,作为上述实施方式的晶片处理装置1,以具有2个传送模块50a、50b和将它们连接的通路模块55的结构为例进行了图示说明,但是装置结构并不限于此。即,也可以是采用下述结构:利用多个通路模块55将3个以上的传送模块50彼此连接,并利用端板53将其末端部封闭。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1