一种非接触式的校正机构的制作方法
1.本实用新型涉及硅片搬运领域,特别涉及一种非接触式的校正机构。
背景技术:
2.目前现有的晶圆设备搬运技术以真空吸爪或伯努利吸盘为主要应用。真空吸爪以牙叉上的真空孔,接触晶圆背面后吸真空后搬运。伯努利吸盘为以大气方式,在晶圆上造成负压产生非接触式的效果。
3.真空吸爪的吸附搬运方式会接触到晶圆的背面,对晶圆会有粘附落尘或污染的风险,伯努利吸盘虽可以达到非接触的搬运方式,但是成本较高。
技术实现要素:
4.本实用新型提供一种非接触式的校正机构,旨在解决真空吸爪会接触晶圆表面及伯努利吸盘成本高的问题。
5.本实用新型提供一种非接触式的校正机构,包括夹臂、驱动夹臂开合的驱动模块、直接接触圆片的夹取柱,所述驱动模块分别连接两个夹臂,所述驱动模块带动两个夹臂同时向相反方向移动,每个所述夹臂上间隔连接有多个夹取柱,多个所述夹取柱的位置与圆片的外圈圆周弧度配合,夹取时多个所述夹取柱的侧面接触圆片的外圈边沿。
6.作为本实用新型的进一步改进,打开时,两个所述夹臂上夹取柱之间的张开距离大于圆片的直径;夹取时,两个所述夹臂上夹取柱之间的闭合距离等于圆片的直径。
7.作为本实用新型的进一步改进,每个所述夹臂上连接有两个夹取柱,两个所述夹取柱的间隔距离小于圆片的直径。
8.作为本实用新型的进一步改进,所述夹取柱上朝向圆片的一面设有凹槽,夹取时圆片外圈边缘夹入所述夹取柱的凹槽内。
9.作为本实用新型的进一步改进,所述凹槽为夹取柱上饶柱体一圈的凹圈。
10.作为本实用新型的进一步改进,所述夹取柱为圆柱体结构。
11.作为本实用新型的进一步改进,所述夹取柱的侧面外圈包裹有缓冲垫,所述夹取柱通过缓冲垫与圆片接触。
12.作为本实用新型的进一步改进,所述夹取柱的轴向与夹臂的平面垂直。
13.作为本实用新型的进一步改进,所述驱动模块为伺服电机。
14.本实用新型的有益效果是:本用于搬运硅片的中心定位校正机构,搬运和校正时,夹臂或夹取柱不会接触到硅片的正、反面,非接触设计可以避免正反面接触时的污染,将搬运功能和校正功能结合,实现功能简化流程。
附图说明
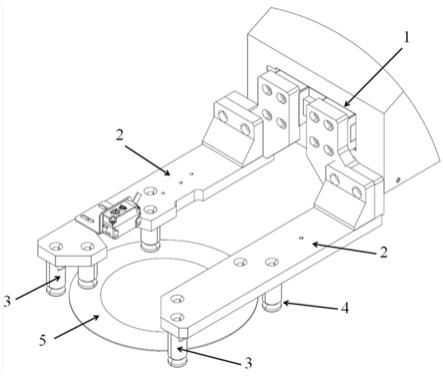
15.图1是本实用新型一种非接触式校正机构的整体结构图。
具体实施方式
16.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。
17.如图1所示,本实用新型的一种非接触式的校正机构,包括夹臂2、驱动夹臂开合的驱动模块1、直接接触圆片5的夹取柱3,驱动模块1分别连接两个夹臂2,驱动模块1带动两个夹臂2同时向相反方向移动,每个夹臂2上间隔连接有多个夹取柱3,多个夹取柱3的位置与圆片5的外圈圆周弧度配合,夹取时多个夹取柱3的侧面接触圆片5的外圈边沿。圆片5可以为硅片或晶圆,驱动模块1为伺服电机。优选的,夹取柱3为圆柱体结构,夹取柱3的轴向与夹臂2的平面垂直。
18.驱动模块1带动两个夹臂2向相反方向移动来驱动夹臂2的张开或闭合,在夹取前,夹臂2处于张开状态并移动到圆片5放置处,通过驱动模块1带动夹臂5闭合,闭合时多个夹取柱3的侧面接触到圆片5的圆周边缘,贴合后将圆片5抓起。由与夹取柱3是按照圆片5外圈圆周弧度设置的,在夹取圆片5时也对其圆心进行了定位校正。即利用四周的夹取柱3不接触硅片或晶片的正反面可以做搬运,同时可以达到校正硅片或晶片中心位置。
19.夹取柱3的侧面外圈包裹有缓冲垫,夹取柱3通过缓冲垫与圆片5接触。通过缓冲垫与圆片5接触,可以避免夹取柱3直接接触圆片5产生硬碰硬的摩擦或碰撞,而对圆片5造成损伤,通过缓冲垫做过渡,可以降低碰撞的程度,对圆片5起到保护的作用。
20.该非接触式校正机构打开时,两个夹臂2上夹取柱3之间的张开距离大于圆片5的直径,此张开距离的设定使夹取柱3能完全位于圆片5的两侧。夹取时,两个夹臂2上夹取柱3之间的闭合距离等于圆片5的直径,此闭合距离的设定保证了夹取柱3能刚好夹取圆片5而不至于过渡挤压圆片5导致圆片5的损坏。
21.优选的,夹臂2上连接有两个夹取柱3,两个夹取柱3的间隔距离小于圆片5的直径。同一夹臂2上可以根据圆片5的大小设置不同数量的夹取柱3,且两个相距最远的夹取柱3的间距小于圆片5的直径;当同一夹臂2上只安装有两个夹取柱3时,则两个夹取柱3的间隔距离小于圆片5的直径,保证夹臂2闭合时,两个夹取柱3侧面都能贴合住圆片5的圆周边沿。
22.夹取柱3上朝向圆片5的一面设有凹槽4,夹取时圆片5外圈边缘夹入夹取柱3的凹槽4内。凹槽4为夹取柱3上饶柱体一圈的凹圈。凹槽4的设计可以定位圆片5在夹取柱3上的贴合位置,使夹取得更加牢固,且每个夹取柱3都在同一位置设置凹槽4,则能保证圆片5夹取后保持水平状态。凹槽4可以在夹取柱3靠近圆片5一端设置,也可以设计成绕夹取柱3一圈的凹圈,来增加凹槽4的面积,也增加了圆片5的接触位置。
23.夹取柱3的轴向与夹臂2的平面垂直,夹取柱3与夹臂2垂直连接保证了夹取柱3的侧面能与圆片5接触。
24.该非接触式的校正机构的工作流程:
25.通过机器人将该校正机构移动到待夹取圆片5的位置,驱动模块1带动夹臂2张开,机器人带动校正机构下降到圆片5处,驱动模块1带动夹臂2闭合,此时夹臂2上的多个夹取柱3向圆片5的外圈圆周贴合,将圆片2卡入凹槽4内,机器人提起校正机构并移动到待放置圆片5的位置后下降,此时驱动模块1带动夹臂2张开,圆片5放置完成。
26.以上内容是结合具体的优选实施方式对本实用新型所作的进一步详细说明,不能认定本实用新型的具体实施只局限于这些说明。对于本实用新型所属技术领域的普通技术
人员来说,在不脱离本实用新型构思的前提下,还可以做出若干简单推演或替换,都应当视为属于本实用新型的保护范围。
技术特征:
1.一种非接触式的校正机构,其特征在于,包括夹臂、驱动夹臂开合的驱动模块、直接接触圆片的夹取柱,所述驱动模块分别连接两个夹臂,所述驱动模块带动两个夹臂同时向相反方向移动,每个所述夹臂上间隔连接有多个夹取柱,多个所述夹取柱的位置与圆片的外圈圆周弧度配合,夹取时多个所述夹取柱的侧面接触圆片的外圈边沿。2.根据权利要求1所述非接触式的校正机构,其特征在于,打开时,两个所述夹臂上夹取柱之间的张开距离大于圆片的直径;夹取时,两个所述夹臂上夹取柱之间的闭合距离等于圆片的直径。3.根据权利要求1所述非接触式的校正机构,其特征在于,每个所述夹臂上连接有两个夹取柱,两个所述夹取柱的间隔距离小于圆片的直径。4.根据权利要求1所述非接触式的校正机构,其特征在于,所述夹取柱上朝向圆片的一面设有凹槽,夹取时圆片外圈边缘夹入所述夹取柱的凹槽内。5.根据权利要求4所述非接触式的校正机构,其特征在于,所述凹槽为夹取柱上饶柱体一圈的凹圈。6.根据权利要求1所述非接触式的校正机构,其特征在于,所述夹取柱为圆柱体结构。7.根据权利要求1所述非接触式的校正机构,其特征在于,所述夹取柱的侧面外圈包裹有缓冲垫,所述夹取柱通过缓冲垫与圆片接触。8.根据权利要求1所述非接触式的校正机构,其特征在于,所述夹取柱的轴向与夹臂的平面垂直。9.根据权利要求1所述非接触式的校正机构,其特征在于,所述驱动模块为伺服电机。
技术总结
本实用新型涉及硅片搬运领域,特别涉及一种非接触式的校正机构。该校正机构包括夹臂、驱动夹臂开合的驱动模块、直接接触圆片的夹取柱,驱动模块分别连接两个夹臂,驱动模块带动两个夹臂同时向相反方向移动,每个夹臂上间隔连接有多个夹取柱,多个夹取柱的位置与圆片的外圈圆周弧度配合,夹取时多个夹取柱的侧面接触圆片的外圈边沿。本用于搬运硅片的中心定位校正机构,搬运和校正时,夹臂或夹取柱不会接触到硅片的正、反面,非接触设计可以避免正反面接触时的污染,将搬运功能和校正功能结合,实现功能简化流程。实现功能简化流程。实现功能简化流程。
技术研发人员:黄海荣 谢柏弘
受保护的技术使用者:深圳远荣智能制造股份有限公司
技术研发日:2021.04.15
技术公布日:2021/11/9
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1