一种机械定时器擒摆震荡走时系统的制作方法
1.本实新型涉及机械定时器,特别是机械定时器的传动系统。
背景技术:
2.在棘轮式擒纵震荡系统结构的机械式定时器产品中,最长定时时间是产品的一个重要指标,也是用户考量的一个重要因素与标准。不同的电器产品,有不同的满程定时需求,满程定时是指定时器最长定时时间,也就是在一个定时工作期定时器能定时工作的最长时间,这个时间,譬如有60分钟的,30分钟的,15分钟的,8分钟的。对于满程定时8分钟的,在定时半分钟,20钞,10钞等相对短时间定时,走时度量相对准确。这个相对短时间定时,对于满程定时60分钟的时器,走时度量就会不很准确,这除了变速传动引起误差,更在于手动无级旋调定时产生误差较大所致。电器工作定时是这样,作为提醒定时也是这样。
3.现有技术中一类25个棘齿擒纵轮的机械定时器已成为习用产品,生产厂家也将其作为固定性产品传统地定态生产。这类定时器通常规般性地为满程定时60分钟。可是当客户要求满程定时为30分钟,15分钟。8分钟的定时器时,厂家常常需要将定时器设计成不同的传动比,并配置不同规格的发条,由此导致工艺烦琐,生产效率低,成本高,不利于大批量生产等问题,究其原因在于目前机械定时器诸多零部件通用性差的定格状态。
技术实现要素:
4.本实用新型要解决现有技术机械定时器诸多零部件通用性差的定格状态,生产不同满程定时的机械定时器工艺烦琐,生产效率低,成本高等问题,为此提供本实用新型的一种机械定时器擒摆震荡走时系统,该系统生产不同满程定时时间定时器无需变更减速机构传动比,解决了现有技术存在的所述问题。
5.为解决上述问题,本实用新型采用的技术方案是具有包括头轮部件和末轮部件的齿轮传动机构,末轮部件与擒纵轮部件配合,其特殊之处是所述擒纵轮部件的擒纵轮的棘齿数目为25
·
1/n四舍五入之整数值,n为小于12的偶数。
6.所述n为2,所述擒纵轮的棘齿数目为13。
7.所述n为4,所述擒纵轮的棘齿数目为6。
8.所述n为8,所述擒纵轮的棘齿数目为3。
9.本实用新型所述头轮部件包括头轮轴、头轮大轮和定时凸轮,末轮部件包括末轮轴、末轮大轮和末轮小轮,擒纵轮部件包括擒纵轮轴、擒纵轮和擒纵部件小轮。
10.机械定时器的齿轮传动机构运行从头轮部件向末轮部件方向是逐级加速的。头轮部件连着发条,手动拧转头轮轴到定时起始位置后松手,发条上紧的同时定时走时开始,到走时结束定时时间段完了。走时时间段对应是通电的,走时结束即断电,走时时间段是对应提醒前备留时间的,走时结束即发出提醒信号,典型的是闹铃或音乐声。走时时间段内,发条释放扭力,头轮轴慢速回转时末轮轴依加速倍数相对快速回转。末轮部件与擒纵轮部件配合,擒纵轮部件的擒纵轮受擒纵叉制约,一个棘齿挨一个棘齿周期性回转,其中擒纵叉与
摆轮-游丝配合周期性摆动。没有擒纵叉制约,擒纵轮会极快速回转,短时间内头轮部件回转到位,发条扭力全部释放。
11.机械定时器的齿轮传动机构运行从头轮部件向末轮部件方向逐级加速,倒过来,从末轮部件到头轮部件方向逐级减速。擒纵轮受擒纵叉制约,一个棘齿挨一个棘齿周期性回转,传递到头轮的缓慢回转,回转到位于设定点,定时完了。头轮轴上还连着定时凸轮,头轮回转到位定时凸轮回转到位,相关连动件动作结束走时。
12.擒纵轮回转速度决定头轮回转速度。擒纵轮一定的回转速度,在改变齿轮传动机构各级传动比,包括改变传动级数情况下,头轮回转速度得以改变。现有技术在改变头轮回转速度,获得不同满程定时的企求上,正是采取改变传动比的方式来实现的,与此同时还常常需改变发条规格,由此导致产品生产工艺烦琐,生产效率低,成本高,不利于大批量生产等问题。
13.本实用新型突破本领域现有技术传统习惯做法,以现有满程定时60分钟的25个棘齿擒纵轮为基本,设制擒纵轮,把擒纵轮的棘齿数目设成为25与1/n相乘,四舍五入,得到的整数,n为小于12的偶数,这些偶数为2、4、6、8、10,得到擒纵轮其棘齿数目为13、6、4、3,本实用新型可以免取4,得到擒纵轮其棘齿数目分别为13、6、3,各为25的1/2、1/4、1/8四舍五入之整数值;25的1/10四舍五入也是3。
14.擒纵轮25个棘齿,周期性一个棘齿挨一个棘齿回转,满程定时为60分钟;13个棘齿的擒纵轮,同样周期性一个棘齿挨一个棘齿回转,擒纵轮回转速度提高近1倍,相应地头轮回转速度提高近1倍,如此制作满程定时30分钟的定时器;同理,6个棘齿擒纵轮,制作满程定时15分钟的定时器;3个棘齿擒纵轮制作满程定时8分钟的定时器,其也可制作满程定时7分钟的定时器,优选8分钟的。
15.本实用新型在现有产品基础上,无需改变传动机构传动比与传动级数,机械定时器除变更设制本实用新型的擒纵轮外的所有部件无需作结构变动,可获得满程定时为基本定时的1/2、1/4、近1/8的机械定时器,以满足客户需要。故本实用新型具有工艺简单,生产效率高,成本低,有利于大批量生产等效果。本实用新型采取业内意想不到的技术方案,实现了意想不到的有益技术效果。
16.进一步地,作为优选,本实用新型可以将摆轮(摆片)的厚度稍许减小,如将厚1mm的摆片制作成厚0.7、0.8mm的,在于考虑机械冲击因素。
17.下面结合附图和具体实施方式进一步说明本实用新型。
附图说明
18.图1是现有技术的一种机械定时器擒摆震荡走时系统结构示意图;
19.图2是本实用新型一实施例的一种机械定时器擒摆震荡走时系统结构示意图;
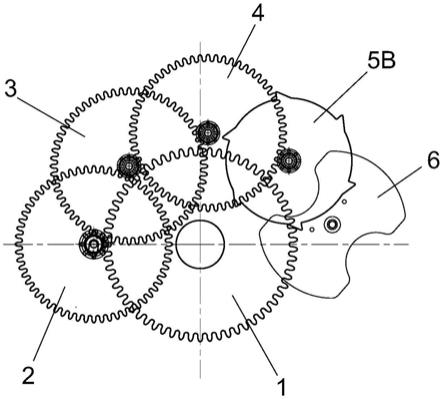
20.图3是本实用新型另一实施例的一种机械定时器擒摆震荡走时系统结构示意图;
21.图4是本实用新型又一实施例的一种机械定时器擒摆震荡走时系统结构示意图。
22.图中标记与对应件:1头轮大轮,2二轮大轮,3三轮大轮,4四轮大轮,5擒纵轮,5a擒纵轮a,5b擒纵轮b,5c擒纵轮c,6摆片,7擒纵叉(不完全画出)。
具体实施方式
23.实施例一
24.一种机械定时器擒摆震荡走时系统,参见图2,头轮大轮1啮合二轮小轮,二轮大轮2啮合三轮小轮,三轮大轮3啮合四轮小轮,四轮大轮4啮合擒纵轮部件小轮,擒纵轮部件小轮与擒纵轮轴和擒纵轮a 5a同轴共转。拧紧的发条释放扭力时,头轮大轮1将扭力逐级传递,轮系回转速度从头轮部件到末轮部件逐级加快。擒纵轮a 5a受擒纵叉7制约,周期性逐齿回转,回转速度为图1所示擒纵轮5的近2倍,相应地,头轮轴回转速度为图1所示的近2倍。本例的擒纵轮a 5a为13个棘齿的,本例的满程定时为30分钟,与之对应的图1的,满程定时为60分钟。
25.实施例二
26.本例,参见图3,擒纵轮b 5b为6个棘齿的,本例的满程定时为15分钟。
27.实施例三
28.参见图4,擒纵轮c 5c为3个棘齿的,本例的满程定时为8分钟。
技术特征:
1.一种机械定时器擒摆震荡走时系统,具有包括头轮部件和末轮部件的齿轮传动机构,末轮部件与擒纵轮部件配合,其特征是所述擒纵轮部件的擒纵轮的棘齿数目为25
·
1/n四舍五入之整数值,n为小于12的偶数。2.如权利要求1所述的走时系统,其特征是n为2,所述擒纵轮的棘齿数目为13。3.如权利要求1所述的走时系统,其特征是n为4,所述擒纵轮的棘齿数目为6。4.如权利要求1所述的走时系统,其特征是n为8,所述擒纵轮的棘齿数目为3。
技术总结
一种机械定时器擒摆震荡走时系统,具有包括头轮部件和末轮部件的齿轮传动机构,末轮部件与擒纵轮部件配合,其特征是所述擒纵轮部件的擒纵轮的棘齿数目为25
技术研发人员:朱忠辉
受保护的技术使用者:浙江汤溪工具制造有限公司
技术研发日:2021.08.31
技术公布日:2022/1/28
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1