加工机的电缆夹持装置的制作方法
加工机的电缆夹持装置
1.相关申请的交叉引用
2.本技术根据35u.s.c.
§
119要求于2020年3月30日提交的美国临时专利申请no.63/001,787的优先权。
技术领域
3.本发明涉及一种用于电缆的加工机,更具体地,涉及一种加工机的电缆夹持装置。
背景技术:
4.在诸如电线端接器的加工机中,电缆夹持装置在电缆被加工时保持电缆。电缆夹持装置包括手柄,该手柄可在释放电缆的打开状态和夹取电缆的闭合状态之间枢转。手柄的枢转运动通过一机构来闭合或打开围绕电缆的夹持装置。该机构还能够被致动以向手柄施加使手柄枢转的力。
5.当手柄通过机构从夹取电缆的位置移动以释放电缆时,手柄由机构的连杆保持并且不会完全返回到打开状态。如果该机构随后被致动以施加旨在将手柄保持在打开状态的力,以将手柄固定用于加工机的进一步循环,则手柄可能会无意中枢转回到闭合状态。所要解决的问题是提供一种夹持装置,能够在打开状态下可靠地固定手柄,降低电缆夹持装置和加工机的操作效率。
技术实现要素:
6.该问题通过一种电缆夹持装置来解决,该电缆夹持装置包括一对夹爪、复位机构和通过复位机构连接到夹爪的手柄。手柄可围绕手柄枢轴在夹爪处于打开位置的第一位置和夹爪围绕电缆处于闭合位置的第二位置之间枢转。在移动到将手柄保持在第一位置的复位机构的复位位置之前,复位机构将手柄从第二位置枢转到第一位置。
附图说明
7.现在将参照附图以示例的方式描述本发明,其中:
8.图1是电缆夹持装置的俯视立体图;
9.图2是电缆夹持装置的一部分的底部透视图;
10.图3a是在夹持电缆的第一步骤中的电缆夹持装置的侧剖视图;
11.图3b是在夹持电缆的第二步骤中的电缆夹紧装置的侧剖视图;
12.图3c是在夹持电缆的第三步骤中的电缆夹持装置的侧剖视图;
13.图3d是在夹持电缆的第四步骤中的电缆夹持装置的侧剖视图;
14.图3e是在夹持电缆的第五步骤中的电缆夹持装置的侧剖视图;
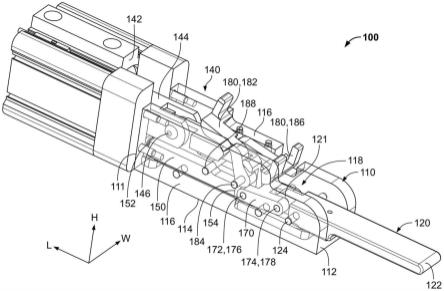
15.图4是根据实施例的加工机的透视图;和
16.图5是加工机的一部分的详细透视图。
具体实施方式
17.根据实施例的电缆夹持装置100如图1和图2所示。电缆夹持装置100包括外壳110、枢转地附接到外壳110的手柄120、手柄保持装置130、连接到手柄120的复位机构140、枢转地连接到外壳110并通过复位机构140移动的一对夹爪180。
18.外壳110,如图1和图2所示,沿纵向方向l从第一端111延伸到第二端112。外壳110具有底壁114和一对侧壁116,一对侧壁从底壁114在垂直于纵向方向l的高度方向h上延伸。侧壁116沿纵向方向l相互平行地延伸,并且在垂直于纵向方向l和高度方向h的宽度方向w上彼此间隔开。底壁114和侧壁116之间限定出接收空间118。
19.在图1和图2中,外壳110被显示为透明的,以便在描绘和描述接收空间118内的其他元件的位置时易于理解。然而,透明外观并不旨在表示或限制外壳110的任何质量,外壳是如图4和5所示的电缆夹持装置100的实心构件。
20.如图1和图2所示,手柄120沿纵向方向l从第一端121延伸到第二端122。手柄120在第一端121和第二端122之间具有手柄枢轴124。在第一端121,如图3a所示,手柄120具有延伸穿过手柄120的斜槽126。斜槽126具有下端127和与下端127相对的上端128。在实施例中,斜槽126在由高度方向h和纵向方向l限定的平面中从下端127线性且对角地延伸到上端128。在其他实施例中,斜槽126可以在由高度方向h和纵向方向l限定的平面内以弯曲方式从下端127延伸到上端128。
21.手柄120,如图1所示,位于接收空间118中,并通过手柄枢轴124连接至外壳110的侧壁116。手柄120的第二端122从外壳110的第二端112突出。手柄120可相对于外壳110绕手柄枢轴124枢转。
22.如图2所示,手柄保持装置130位于手柄120和外壳110之间的接收空间118中。手柄保持装置130可以附接到外壳110或可以附接到手柄120在另一个实施例中,手柄保持装置130可以具有多个部件并且可以附接到外壳110和手柄120两者。在一个实施例中,手柄保持装置130是能够将手柄120吸引向外壳110的磁体。在其他实施例中,手柄保持装置130可以是球形锁销(balldetent)、摩擦元件、弹簧机构或任何其他类型的装置,其可以提供在图1和2所示位置抵着外壳110保持手柄120的力。
23.复位机构140,如图1和图2所示,包括致动装置142、连接到致动装置142的滑块150、设置在致动装置142和滑块150之间的多个弹簧160、以及将滑块150连接到手柄120的连杆170。
24.致动装置142,如图1和图2所示,附接到外壳110的第一端111,并具有沿纵向方向l延伸到接收空间118中的u形夹144。u形夹144具有沿纵向方向l设置在u形夹144的一端的u形销146。所示实施例中的致动装置142是能够使u形夹144沿纵向方向l移动的气缸。在其他实施例中,致动装置142可以是能够使u形夹144沿纵向方向l移动的任何动力装置。
25.滑块150,如图1和图2所示,位于接收空间118中,并沿纵向方向l从第一端152延伸到第二端154。第一端152连接到u形销146。
26.如图2所示,多个弹簧160位于致动装置142和滑块150在纵向方向l上的第一端152之间的接收空间118中。在所示实施例中,两个弹簧160位于致动装置142和滑块150之间。在其他实施例中,仅一个弹簧160或多于两个弹簧160可以定位在致动装置142和滑块150之间。在所示实施例中,每个弹簧160是螺旋弹簧。在其他实施例中,每个弹簧160可以是在被
压缩时提供向外弹性弹簧力的任何其他类型的弹簧。
27.如图1和图2所示,连杆170位于接收空间118中并从第一端172延伸到第二端174。第一端172具有连接到滑块150的第二端154的连杆枢轴176。连杆170可相对于滑块150绕连杆枢轴176枢转。第二端174具有延伸穿过手柄120的斜槽126的驱动销178,如图3a所示。连杆170可相对于手柄120绕驱动销178枢转。
28.如图1和图2所示,夹爪180包括第一夹爪182和第二夹爪186,第一夹爪182和第二夹爪186设置在接收空间118中并从其伸出。第一夹爪182具有连接到外壳110的第一夹爪枢轴184。第一夹爪182可相对于外壳110绕第一夹爪枢轴184枢转。第二夹爪186具有沿纵向方向l在致动装置140和第一夹爪枢轴184之间连接到外壳110的第二夹爪枢轴188。第二夹爪186可相对于外壳110绕第二夹爪枢轴188枢转。
29.现在将主要参考图3a-3e更详细地描述利用电缆夹持装置100夹持电缆800。在图3a-3e中,图1和2中所示的电缆夹持装置100的一些元件的附图标记可以为了附图的清楚而省略,但是图3a-3e中所示的元件与上面关于图1和图2所示和描述的那些相同。
30.在图3a中,手柄120显示在第一位置p1,其中手柄120沿纵向方向l延伸并抵靠外壳110。手柄保持装置130在第一位置p1施加保持力rt,用于将手柄120保持在第一位置p1。在手柄120的第一位置p1,夹爪180处于打开位置o,在该打开位置o,夹爪180与电缆800间隔开。
31.复位机构140在图3a中的复位位置ps中示出。在复位位置ps,弹簧160在致动装置142和滑块150之间被压缩并施加弹簧力sf,将滑块150在纵向方向l上推向手柄120。致动装置142不施加力到处于复位位置ps的滑块150。当手柄120处于第一位置p1时,滑块150朝向手柄120的推动使连杆170的驱动销178沿着斜槽126移动并与上端128邻接,从而使连杆170围绕连杆枢轴176相对于滑块150枢转。弹簧力sf通过滑块150和连杆170传递到与斜槽126的上端128邻接的驱动销178,从而在斜槽126处向手柄120施加肘节力ft。
32.如图3a所示,肘节轴线t延伸穿过连杆枢轴176的中心和手柄枢轴124的中心。当驱动销178在高度方向h上在肘节轴线t上方位于斜槽126中时,施加于手柄120的肘节力ft促使手柄120围绕手柄枢轴124朝向第一位置p1枢转。如图3a所示,当复位机构140处于复位位置ps并且手柄120处于第一位置p1时,肘节力ft作用以将手柄120保持在第一位置p1。
33.为了夹持电缆800,使用者将手柄120的第二端122围绕手柄枢轴124旋转离开底壁114并离开第一位置p1,如图3b所示。使用者需要施加足以克服将手柄120保持在第一位置p1的保持力rt和肘节力ft的力来枢转手柄120。
34.当手柄120从第一位置p1枢转出时,连杆170相对于手柄120的第一端121枢转,同时驱动销178保持与斜槽126的上端128邻接。如图3b所示,当仍然通过经由滑块150和连杆170传递的弹簧力sf来施加肘节力ft时,驱动销178在高度方向h上在肘节轴线t下方移动。在肘节轴线t下方施加的肘节力ft推动手柄120进一步远离图3a所示的第一位置p1并朝向图3c所示的手柄120的第二位置p2。在肘节轴线t在第一位置p1和第二位置p2之间的情况下,肘节力ft将手柄120推向肘节轴线t上方的第一位置p1,将手柄120推向肘节轴线t下方的第二位置p2。
35.在驱动销178低于肘节轴线t的情况下,弹簧力sf将滑块150沿纵向方向方向l从致动装置142移动到滑块150的延伸位置pe,如图3c所示。将致动装置142附接至滑块150的u形
夹144与滑块150一起沿纵向方向l移动。肘节力ft继续使连杆170相对于第一端121枢转,直到手柄120到达第二位置p2。当手柄120移动到第二位置p2时,驱动销178沿着斜槽126从上端128滑动到与下端127邻接。
36.当滑块150移动到延伸位置pe时,滑块150接触夹爪180并且滑块150的运动使夹爪180围绕夹爪枢轴184、188从图3a所示的打开位置o枢转到图3c所示的闭合位置c。在闭合位置c,夹爪180邻接电缆800,第一夹爪182设置在电缆800的第一侧,第二夹爪186设置在电缆800的相对的第二侧。将滑块150移动到延伸位置pe的弹簧力sf使夹爪180移动到闭合位置c的第一状态,其中夹爪180利用由弹簧力sf提供的夹持力fg夹持电缆800。当手柄120处于第二位置p2时,夹爪180处于闭合位置c。
37.从夹爪180的闭合位置c的第一状态,在一个实施例中,致动装置142可以通过u形夹144施加致动力fa,推动处于延伸位置pe的滑块150沿纵向方向l进一步远离驱动装置142。滑块150上的驱动力fa推动夹爪180围绕夹爪枢轴184、188进一步与电缆800接合,从而将夹爪180转移到闭合位置c的第二状态,其中,夹爪180以由弹簧力sf和致动装置142的致动力fa提供的更大夹持力fg夹住电缆800。与在第一状态相比,在第二状态,夹爪180在电缆800上施加更紧的夹持力fg。
38.当电缆800不再需要通过夹爪180的夹持被夹持装置100夹持时,致动装置142通过u形夹144以与图3c所示相反的方向施加致动力fa以使滑块150沿纵向方向l朝向致动装置142移动,如图3d所示。致动装置142将滑块150从远离致动装置142的延伸位置pe移动到靠近致动装置142的缩回位置pr,从而压缩弹簧160。将滑块150移动到缩回位置pr的致动力fa抵抗弹簧力sf并且大于弹簧力sf。在图3d所示的状态下不施加肘节力ft,因为致动力fa克服了弹簧力sf。
39.滑块150到缩回位置pr的运动使夹爪180绕夹爪枢轴184、188从闭合位置c枢转到打开位置o,如图3d所示,从夹持力fg释放电缆800。滑块150的运动还使连杆170相对于手柄120枢转。驱动销178保持与斜槽126的下端127邻接,从而使手柄120围绕手柄枢轴124朝第一位置p1枢转回。在图3d所示的状态下,驱动销178仍在肘节轴线t下方;如果在此状态下移除致动力fa且弹簧力sf是唯一施加于滑块150的力,则手柄120将在肘节力ft的作用下枢转回到第二位置p2。
40.致动装置142继续施加致动力fa直到手柄120到达与底壁114抵接的第一位置p1,如图3e所示。手柄保持装置130在第一位置p1施加保持力rt,用于将手柄120保持在第一位置p1。当手柄120到达第一位置p1并且滑块150抵抗弹簧力sf保持在缩回位置pr时,驱动销178保持与斜槽126的下端127邻接。
41.当致动装置142被停用时,致动力fa从图3e所示的位置释放。然后弹簧力sf使滑块150远离致动装置142移动;弹簧力sf将滑块150从缩回位置pr移出并朝向延伸位置pe移动。弹簧力sf通过滑块150的运动作用在连杆170上,将驱动销178从肘节轴线t下方的斜槽126的下端127移动到肘节轴线t上方的斜槽126的上端128,如图3a中的复位位置ps所示。弹簧力sf施加肘节力ft,如图3a所示,将手柄120保持在第一位置p1。
42.用户可以使用电缆夹持装置100来夹持和释放电缆800,将手柄120复位到第一位置p1,如图3a-3e所示。如图3c-3e所示,复位机构140将手柄120从第二位置p2枢转到第一位置p1,然后移动到图3a所示的将手柄120保持在第一位置p1的复位位置ps。随着手柄120从
第二位置p2移回第一位置p1,直到手柄120完全到达第一位置p1才施加作用在手柄120上的肘节力ft。因此,根据本发明的电缆夹持装置100在最初施加时确保了肘节力ft在手柄120上的作用,避免了手柄120在肘节力ft下意外旋转回到第二位置p2。
43.根据实施例的加工机10,如图4和图5所示,包括框架200、相对于框架200沿高度方向h可移动的驱动器300、附接到驱动器300的上部工具400、附接到框架200的底板500和附接到底板500的下部工具600。驱动器300使上部工具400沿高度方向h朝向和远离下部工具600移动。驱动器300在一个实施例包括电机、齿轮箱和用于平移运动的连接。在其他实施例中,驱动器300可以是能够相对于下部工具600移动上部工具400的任何类型的驱动器。
44.如图4和图5所示,加工机10包括附接到底板500的电缆夹持装置100。电缆夹持装置100如上面关于图3a-3e所述那样夹持和释放电缆800,电缆800的一端设置在端子900中,端子900保持在下部工具600中。
45.电缆800定位在端子900中,夹爪180处于打开位置o,手柄120处于第一位置p1,复位机构140处于复位位置ps,如图3a所示。用户然后围绕电缆800闭合夹爪180以将夹持力fg施加到电缆800,如上面关于图3a-3c所示和描述的。
46.电缆夹持装置100夹持电缆800,如图3c所示和所述,以在驱动器300相对于下部工具600移动上部工具400的同时定位电缆800。上部工具400移动朝向并邻接下部工具600以将端子900压接到电缆800上,其中夹爪180处于闭合位置c的第一状态。夹爪180在闭合位置c的第一状态中施加的较轻夹持力fg允许电缆800在夹爪180中沿宽度方向w滑动或膨胀,同时端子900和电缆800在压接期间受到挤压。
47.当压接完成时,驱动器300将上部工具300从下部工具600移开,如图4和图5所示。如果正确形成了压接,则用户将压接至端子900的电缆800从电缆夹持装置100释放,如图3c-3e所示和上面描述的。
48.在一个实施例中,如果检测到有缺陷的压接,致动装置142施加致动力fa以推动夹爪180进入闭合位置c的第二状态,从而在电缆800上施加更紧的夹持力fg,防止用户从加工机10移除电缆800。在该实施例中,电缆800只能在附加动作(例如在加工机10处输入代码或在加工机10处刷证章)之后从加工机10和电缆夹持装置100移除,如图3c-3e和上文所述。
49.在图4和图5所示的实施例中,加工机10是用于将端子900压接到电缆800上的电线端接器。在其他实施例中,加工机10可以是加工电缆800的任何类型的机器,并且需要电缆夹持装置700在加工过程中夹持电缆800。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1