气相生长装置以及外延晶片的制造方法与流程
1.本发明涉及用于使半导体单晶薄膜在单晶基板的主表面气相生长的气相生长装置和用气相生长装置实现的外延晶片的制造方法。
背景技术:
2.在单晶基板上形成有半导体单晶薄膜的外延晶片,例如在硅单晶基板(以下简称为“基板”)的表面通过气相生长法形成有硅单晶薄膜(以下简称为“薄膜”)的硅外延晶片广泛应用于双极ic、mos-ic等电子设备。近年来,在例如直径为200mm及以上的外延晶片的制造中,代替对多块晶片进行分批处理的方法,单片式气相生长装置正在成为主流。该单片式气相生长装置为,在反应容器内水平地旋转保持一块基板,一边从反应容器的一端向另一端大致水平且一个方向地供给原料气体一边使薄膜气相生长。另外,已知在单片式气相生长装置中形成在基板上的半导体单晶层的膜厚分布受基板主表面内的温度分布的影响较大,尤其是,容易产生温度降低的基板外周缘部容易向半导体单晶层的膜厚大的一侧波动。为了防止这种情况,在单片式气相生长装置中,为了实现基板外周缘部的均热,一般在基座(susceptor)的周围设置预热环。
3.一般情况下,硅外延晶片的制造时,基板的加热使用红外线放射加热、高频感应加热或电阻加热等任意方式,虽然硅基板和基座升温但反应容器的温度被保持得低,即形成所谓的冷壁环境。
4.在单片式气相生长装置中,通常成为如下构造,经由气体供给管从形成于反应容器的一端部的气体导入口供给原料气体,在原料气体沿基板主表面流动后,从容器其他端侧的排出口排出。已知在利用这样的构造的装置制造外延晶片的情况下,使沿基板主表面的原料气体的流速增大,可以有效地使硅单晶薄膜的生长速度增大。例如,在非专利文献1中,在制造硅外延晶片时,当通过基座旋转速度的上升使基板主表面与原料气体的相对速度增大,显现出能够使堆叠于基板上的硅单晶层的生长速度增大的规律。
5.在非专利文献1所公开的实验中,供给至反应容器的原料气体的浓度以及流量设定为固定,在这种状况下,在使基座旋转速度上升的情况下,显示出硅单晶层的生长速度增加的结果。另外,在非专利文献2中,在上述的冷壁环境下,当使硅单晶层生长时的气相温度上升,则在原料气体成分的输送速度限速的区域(即,基板主表面上的扩散层)中,热力学地显示出单晶层的生长速度降低。
6.即,若基板主表面的气体流速增加,则来自基板主表面的热移动被促进而基板主表面的温度降低,并且因气体流速增大而使基板主表面的扩散层厚减少,扩散层中的原料气体成分的浓度比例增加。这被认为是因为这些主要原因,使得从原料气体生成硅单晶的化学反应的效率提高,硅单晶层的生长速度增加。
7.现有技术文献
8.专利文献
9.专利文献1:日本特许第6068255号公报
10.专利文献2:日本特开2011-165948号公报
11.非专利文献
12.非专利文献1:《硅外延生长速度的数值计算》:第75次应用物理学会秋季学术演讲会演讲稿集(2014年秋北海道大学)19a-a19-1
13.非专利文献2:《si外延薄膜制作进程的模拟》:日本真空学会杂志,49(2006)卷,525-529页
技术实现要素:
14.根据上述考察,在单片式气相生长装置中,为使基板主表面的原料气体的流速增加,提高半导体单晶层的生长速度,认为采用将成为原料气体流通道的基板主表面与反应容器的顶板下表面之间的空间高度缩小的构造是有效的。具体来说,在半导体单晶的生长工序中,通过采用使保持基板的基座的位置在高度方向上相对于反应容器的顶板下表面进一步接近的构造,能够缩小上述的空间高度。
15.在此,在单片式气相生长装置中在基座装配基板的工序在基座以及预热环与反应容器的顶板下表面的空间(在半导体单晶层生长时成为原料气体流通空间)与形成于反应容器主体外的准备室之间,通过使基板搬送构件进出来进行。然而,在基座与反应容器的顶板下表面的距离缩小的情况下,存在难以确保基板搬送构件进出的空间的问题。
16.本发明的课题在于提供一种即使采用基座以及预热环与反应容器的顶板下表面之间的空间狭小化的结构,也能够充分确保向基座装卸基板时基板搬送构件的移动空间的气相生长装置和使用该装置的外延晶片的制造方法。
17.用于解决的课题的手段
18.本发明的气相生长装置使半导体单晶薄膜在单晶基板的主表面气相生长,具有在水平方向上的第一端部侧形成有气体导入口并同样地在第二端部侧形成有气体排出口的反应容器主体,在该反应容器主体的内部空间中被驱动而旋转的圆盘状的基座上大致水平地保持有单晶基板且单晶基板进行旋转,从气体导入口被导入反应容器主体内的用于形成半导体单晶薄膜的原料气体在沿着单晶基板的主表面流动后,从气体排出口排出,并且以包围基座的方式配置有预热环。并且,为了解决上述课题,还具备:基座升降机构,使基座在第一位置与第二位置之间升降,其中,第一位置形成为,基座的上表面位于比预热环的下表面靠上方的位置,并且,在基座的上表面与反应容器主体的顶板下表面之间形成具有预先决定的高度方向尺寸的原料气体流通空间,第二位置形成为,基座的上表面位于比预热环的下表面靠下方的位置,并且,在基座的上表面与预热环的下表面之间,形成高度方向尺寸比原料气体流通空间大的基板装卸空间;基板搬送构件,在前端侧设置有以在水平方向上保持单晶基板的方式来装卸单晶基板的基板保持部;以及基板搬送构件驱动部,相对于位于第二位置的状态下的基座,在基板装卸位置与准备位置之间使基板搬送构件在水平方向上往复移动,其中,基板装卸位置是基板保持部位于基座的正上方的位置,准备位置是基板保持部位于形成于反应容器主体外的准备室内的位置。
19.另外,本发明的外延晶片的制造方法,其特征在于,使用上述本发明的气相生长装置,并且在反应容器内,在使基座位于第二位置的状态下将单晶基板配置在基座上,接下来使配置有单晶基板的基座向第一位置上升,使原料气体在该反应容器内流通,使半导体单
晶薄膜在单晶基板上气相外延生长,由此得到外延晶片。
20.在本发明的气相生长装置中,优选上述第一位置被确定为原料气体流通空间的高度方向尺寸在5mm以上15mm以下。另外,优选该第一位置被确定为,基座上的单晶基板的主表面与预热环的上表面对齐。
21.在本发明的气相生长装置中,能够以反应容器主体的设有准备室的一侧成为第一端部、相对于基座的旋转轴线与设有准备室的一侧相反的一侧成为第二端部的方式确定原料气体的流通方向。在这种情况下,在反应容器主体的内部空间,位于准备室闸门与预热环之间的部分成为气体通道,准备室闸门能够开闭地将准备室之间分隔。在这种情况下,在气体通道中水平地配置由分隔板,分隔板的高度方向位置确定为,板面前端与预热环的侧面对置。使气体通道的比分隔板靠上侧的空间成为与原料气体流通空间连通的上侧通道空间36a,气体通道的比分隔板靠下侧的空间成为与预热环下方的仪器配置空间连通的下侧通道空间。最好以该分隔板的上表面也与预热环的上表面对齐的方式确定位置。
22.基座例如经由上端结合于该基座的下表面的旋转轴构件被驱动而旋转。在这种情况下,基座升降机构使基座与旋转轴构件一同升降。
23.另外,在本发明的气相生长装置中,能够在基座的周向上以使下端侧从基座朝下突出的方式设置有多个升降销,该升降销以从下侧向上顶起基座上的单晶基板的下表面外周缘部的方式抬起单晶基板。在该情况下,在反应容器主体内,在预热环的下方设有具有升降销驱动臂和升降套筒的基板升降部,其中,升降销驱动臂以与多个升降销对应的方式设置有多个,并且在前端侧形成有用于从下方朝上对各自对应的升降销施力的升降销施力部,升降套筒能够允许旋转轴构件的旋转驱动,并以同轴且能够沿旋转轴构件的轴线升降的方式配置在旋转轴构件的外侧,且与升降销驱动臂的基端侧结合。
24.发明效果
25.本发明的气相生长装置构成为通过利用基座升降机构使基座升降,能够改变反应容器主体内的基座的高度方向保持位置。通过基座位置的改变,能够有级地或无级地对在装配于基座的单晶基板的主表面与反应容器主体的上部壁部下表面之间形成的原料气体流通空间的高度方向尺寸进行改变设定,由此单晶基板上半导体单晶层生长时的原料气体的流速甚至是半导体单晶层的调整成为可能。
26.而且,在本发明中,设置使基座在第一位置与第二位置之间升降的基座升降机构,利用基板搬送构件,相对于位于第二位置的状态的基座装卸单晶基板其中,第一位置形成为,基座的上表面位于比预热环的下表面靠上方的位置,并且,在与反应容器主体的顶板下表面之间形成具有预定的高度方向尺寸的原料气体流通空间,第二位置形成为,基座的上表面位于比预热环的下表面靠下方的位置,并且,在基座的上表面与预热环的下表面之间形成高度方向尺寸比原料气体流通空间大的基板装卸空间。由此,即使采用基座以及预热环与反应容器的顶板下表面之间的空间狭小化的结构,也能够在预热环的下方,充分确保向基座装卸基板时的基板搬送构件的移动空间。
附图说明
27.图1是示出本发明的气相生长装置的整体结构的一例的示意图。
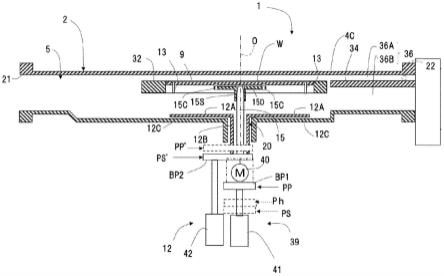
28.图2是反应室的侧视剖视图。
29.图3是硅外延晶片的示意图。
30.图4是示出图1的气相生长装置中基座的升降部分的一例的立体图。
31.图5是将图4中升降销的升降部分可透视地显示的立体图。
32.图6是图1的气相生长装置的控制系统的框图。
33.图7是示出图6的控制系统中控制程序的处理的流程的一例的流程图。
34.图8是说明图1的气相生长装置的动作的第一幅图。
35.图9是说明图1的气相生长装置的动作的第二幅图。
36.图10是说明图1的气相生长装置的动作的第三幅图。
37.图11是说明图1的气相生长装置的动作的第四幅图。
38.图12是说明图1的气相生长装置的动作的第五幅图。
39.图13是说明图1的气相生长装置的动作的第六幅图。
具体实施方式
40.以下,基于附图对用于实施本发明的方案进行说明。
41.图1是示意地示出本发明的气相生长装置的一例的侧视剖视图。如3所示,气相生长装置100用于使硅单晶薄膜el在硅单晶基板w(以下简称为“基板w”)的主表面(上表面)pp气相生长来制造硅外延晶片ew。如图1所示,气相生长装置100具备用于使硅单晶薄膜el在基板w上气相生长的反应室1、用于向该反应室1的内部搬送基板w的准备室(内部空间形成准备室)103以及与准备室103连结的加载锁定室104。准备室103配置在反应容器主体2与加载锁定室104之间。
42.在准备室103的内部,设有用于在加载锁定室104与反应室1之间相互搬送基板w的搬运机器人107。搬运机器人107具备构成连杆机构的多个机械臂105a、105b、105c。机械臂105a、105b、105c以能够绕各自的旋转轴线a1、a2、a3旋转的方式相互结合,由发达107m驱动机械臂105c转动,构成基板搬送构件的末端的机械臂105a(以下称为“基板搬送构件105a”)被驱动而沿水平方向进退。在基板搬送构件105a的前端设有基板保持部105h。在基板保持部105h的上表面载置基板,通过在这种状态下使基板搬送构件105a进退,能够搬送基板。即,搬运机器人107起到作为基板搬送构件驱动部的功能,相对于位于后述的第二位置(图2:ps)的状态的基座9,在基板保持部105h位于基座9的正上方的基板装卸位置与基板保持部105h位于形成于反应容器主体2外的准备室内的准备位置之间,使基板搬送构件105a沿水平方向往复移动。
43.在准备室103的与反应容器主体2相连的部分,能够开闭地配置有用于确保反应容器主体2与准备室103之间的气密状态的准备室闸门108(l型闸阀)。另外,加载锁定室104用于以堆叠状态存放多个基板w。
44.图2示出反应室1的详细构造。反应室1具有在水平方向的第一端部侧形成气体导入口22且同样地在第二端部侧形成气体排出口21的反应容器主体2。用于薄膜形成的原料气体g构成为,从气体导入口22被导入反应容器主体2内,在该反应容器主体2的内部空间5中沿着被保持为大致水平且旋转的基板w的主表面流动后,从气体排出口21排出。反应容器主体2整体以及内部的其他结构构件均由石英以及不锈钢等金属材料构成。
45.在图2中,在反应容器主体2的内部空间5中,配置有被马达40驱动而绕垂直的旋转
轴线o旋转的圆盘状的基座9,在形成于其上表面的浅的沉头孔9b(参照图4中)内,仅配置一块用于制造图3的硅外延晶片ew的基板w。即,该反应室1构成为水平单片式气相生长装置。基板w例如直径为100mm或其以上。另外,如图1所示,与基板w的配置区域对应地在反应容器主体2的上下,以预定间隔配置有用于基板加热的红外线加热灯11。另外,如图2所示,在反应容器主体2内,以包围基座9的方式配置预热环32。
46.原料气体g用于在上述基板w上使硅单晶薄膜气相生长,从sihcl3、sicl4、sih2cl2、sih4、si2h6等硅化合物中选择。原料气体g中可以适当调配作为掺杂气体的b2h6或是ph3、作为稀释气体的h2、n2、ar等。另外,在薄膜的气相生长处理之前在进行基板前处理(例如自然氧化膜、附着有机物的除去处理)时,进行将由稀释气体对从hcl、hf、clf3、nf3等适当选择的腐蚀性气体进行稀释后的前处理用气体供给至反应容器主体2内的处理或者在h2环境气体中实施高温热处理。
47.如图2所示,基座9经由上端结合于该基座9的下表面的旋转轴构件15被马达40驱动而旋转。旋转轴构件15的前端与基座9的下表面中央区域结合,另一方面,在旋转轴构件15的轴线方向中间位置,结合有多个基座支撑臂15d的基端部。各基座支撑臂15d的前端侧沿基座9的半径方向地水平延伸,各个前端部利用结合销15c与基座9的下表面结合。结合销15c起到用于在基座支撑臂15d与基座9的下表面之间形成微小的间隙(本实施方式中1mm左右)的间隔物的作用。如图5所示,旋转轴构件15由轴主体15a和热电偶15b构成,轴主体15a的上端部外周面成为前端侧的直径变小的锥面。轴主体15a的直径缩小的上端部以不能相对转动的方式嵌合在筒状的套筒15s内(此外,在图5中,省略了基座支撑臂15d以及结合销15c的图示)。
48.在反应室1中,设置有使基座9在图2所示的第一位置pp与第二位置ps(在图2中,各位置pp、ps以及ph表示基材bp1的位置,但在以下的说明中用作表示基座9的位置)之间升降的基座升降机构39。在基座9位于第一位置pp的状态下,基座9的上表面位于比预热环32的下表面靠上方的位置,并且,在基座9的上表面与反应容器主体2的顶板下表面之间,确保具有预定的高度方向尺寸的原料气体流通空间5p(参照图13)。上述的第一位置pp以所确保的原料气体流通空间5p的高度方向尺寸为5mm以上15mm以下的比较小的值的方式确定(本实施方式中,约10mm)。
49.另一方面,在基座9位于第二位置ps的状态下,基座9的上表面位于比预热环32的下表面靠下方的位置,并且,在基座9的上表面与预热环32的下表面之间,确保高度方向尺寸比原料气体流通空间5p大的基板装卸空间5t(参照图9~图12)。
50.基座升降机构39构成为使基座9与旋转轴构件15(以及马达40)一同升降,本实施方式中该升降驱动部由气缸41(也可以是电动缸)构成。气缸41的缸杆的前端经由基材bp1而与包含旋转轴构件15以及马达40的基座组件相结合。
51.此外,本实施方式中,由三位置气缸构成气缸41,以能够使基座9的高度方向位置在第一位置pp、第二位置ps以及位于它们中间的基准位置pm这3个位置间切换。另外,基座9的第一位置pp确定为该基座9上的基板w的主表面与预热环32的上表面对齐。通过使预热环32的上表面与基座9上的硅单晶基板w的主表面对齐,在基板w的主表面与预热环32之间不产生阶梯差,能够有效地抑制原料气体气流通过这里时的扰乱。
52.在图2中,在反应容器主体2的气体导入口22侧形成有气体通道36。在气体通道36
内水平地配置有分隔板34,分隔板34的高度方向位置被确定板面前端与预热环32的侧面对置(分隔板34的周缘部例如能够固定于形成气体通道36的侧壁部内表面)。气体通道36的比分隔板34靠上侧的空间成为与原料气体流通空间5p(参照图13)连通的上侧通道空间36a。另外,气体通道36的比分隔板34靠下侧的空间成为与预热环32下方的仪器配置空间连通的下侧通道空间36b。通过设置上述的分隔板34,如图13所示,原料气体g能够不被从预热环32的周侧面向其下侧绕回的涡流等所扰乱地在原料气体流通空间5p内沿基板w的主表面流动,能够使得到的硅单晶膜的膜厚更均匀。
53.此外,本实施方式中,如图2所示,分隔板34的上表面确定为与预热环32的上表面对齐。由此,在预热环32与分隔板34之间不产生阶梯差,能够有效地抑制原料气体气流通过这里时的扰乱。
54.接下来,在基座9的外周缘部设置有多个升降销13。升降销13以从下侧顶起基板w的下表面外周缘部的方式使该基板w抬升,并使各个下端侧从基座9朝下突出。具体来说,如图4所示,在基座9的沉头孔9b的底部外周缘部,沿周向以上下贯通该底部的方式贯通形成多个升降销的插通孔14。如图5所示,升降销13的上端部被做成直径比基端侧大的头部,图4的插通孔14的上端部成为与升降销13的头部配合地直径扩大的沉头孔部。通过升降销13的头部下表面与插通孔14的沉头孔部的底面相抵,阻止升降销从基座9的脱落。
55.如图2所示,在预热环32的下方设有基板升降部20(指状晶片升降器)。如图5所示,基板升降部20包括升降套筒12b和基端侧结合于该升降套筒12b的多个升降销驱动臂12a。升降销驱动臂12a以与各升降销13对应的方式设置,在前端侧形成有用于将升降销13从下方朝上施力的升降销施力部12c。本实施方式中,升降销驱动臂12a绕基座9的中心轴线等角度间隔地配置有3个,分别从升降套筒12b沿基座9的半径方向水平地延伸。另外,形成升降销驱动臂12a的各前端部的升降销施力部12c的宽度比包含升降销驱动臂12a的基端侧的部分宽,升降销施力部12c成为在下侧与升降销13的下端面对置的升降板。另外,升降套筒12b为圆筒状,允许旋转轴构件15的旋转驱动,能够在旋转轴构件15的外侧同轴且沿旋转轴构件15的轴线o1与多个升降销驱动臂12a一体地升降。
56.如图2所示,基板升降部20被基板升降部升降机构12驱动而在上升位置pp’与下降位置ps’之间升降(在图2中,各位置pp’以及ps’表示基材bp2的位置,但在以下的说明中用作表示基板升降部20的位置)。本实施方式中该升降驱动部由气缸42(也可以是电动缸)构成。气缸42的缸杆的前端经由基材bp2而与升降套筒12b结合。
57.当升降套筒12b沿着旋转轴构件15相对于基座9的下表面相对地接近时,升降销13被升降销驱动臂12a的升降销施力部12c向上方施力。由此,基座9上的基板w被升降销13从下侧顶起而抬升,能够容易回收形成硅单晶后的基板w。
58.以下,对反应室1的控制方式的一例进行说明。图6是示出气相生长装置100的制系统的电气结构的框图。该控制系统以由控制用计算机70作为控制主体的方式构成。控制用计算机70为由内部总线75(数据总线+地址总线)将cpu(central processing unit;中央处理单元)71、存储有控制程序72a的rom(rad only memory:只读存储器)72(程序存储部)、在cpu71执行控制程序72a时成为工作存储器的ram(random access memory随机存取存取器)73、进行控制信息的电输入输出的输入输出部74等相互连接的构造。
59.图1所示的反应室1的各驱动要素以如下的方式连接于控制用计算机70。红外线加
热灯11经由灯控制电路11c与输入输出部74连接。另外,用于检测基板温度的热电偶(温度传感器)15b与输入输出部74连接。气体流量调节仪器52、54均具有流量检测部以及内置阀(未图示),并通过与输入输出部74连接,接收来自控制用计算机70的指示,由上述内置阀来连续可变地控制各配管上的原料气体。
60.驱动基座9的马达40经由伺服控制部40c与输入输出部74连接。伺服控制部40c监视马达40的旋转速度,并且参照来自控制用计算机70的旋转速度指示值进行驱动控制,使得马达40(甚至是基座9)的旋转速度保持固定。
61.另外,对基座9进行升降驱动的气缸41经由缸驱动器41c与输入输出部74连接,对基板升降部20进行升降驱动的气缸42经由缸驱动器42c与输入输出部74连接。再有,驱动搬运机器人107的马达107m(图1)经由伺服控制部107c而与输入输出部74连接。伺服控制部107c基于来自安装于马达107m的输出轴的脉冲发射器40p(旋转传感器)的脉冲输入,掌握基板搬送构件105a的位置,接收来自控制用计算机70的驱动指令信息,进行其驱动控制。
62.以下,参照图7的流程图和图8~图13的动作说明图,对被控制程序72a控制的气相生长装置100的动作进行说明。在图7的s101中,随着控制程序72a开始执行,通过使气缸41、42(图6)动作,使基座9移动至图8所示的基准位置ph,使基板升降部20(指状晶片升降器:以下,在图7内记载为“fwl”)移动至上升位置pp’。基座9的基准位置ph和基板升降部20的上升位置pp’确定为,基座9的下表面与基板升降部20的升降销施力部12c之间的距离比升降销13从基座9的下表面突出的长度短。由此,升降销13被基板升降部20向上方施力,成为从基座9的上表面突出的状态。另外,在此期间,根据图1,基板w从加载锁定室104被移送至准备室103内,并装载于基板搬送构件105a的基板保持部105h。
63.接下来,在图7的s102中,通过使气缸41、42(图2)动作,如图9所示,使基座9移动至第二位置ps,使基板升降部20移动至下降位置ps’。基座9和基板升降部20以使升降销13从基座9的上表面突出的状态一体地下降,成为在升降销13与预热环32的下表面之间确保用于接受基板搬送构件105a的间隙即基板装卸空间5t的状态。
64.在这种状态下,在图7的s103中驱动气缸81(图6),使准备室闸门108(图1)成为打开状态。而且,在s104中驱动马达107m(图1),使装载有基板w的状态的基板搬送构件105a前进。由此,如图10所示,基板搬送构件105a的基板保持部105h与基板w一同进入基板装卸空间5t内。此时,在升降销13的上端与基板保持部105h的下表面之间,以及基板保持部105h的上表面与预热环21的下表面之间,分别形成有间隙。在本实施方式中,这些间隙的大小均设定为3.5mm左右。
65.接下来在图7的s105中使气缸41、42(图2)工作,如图11所示,使基座9回到基准位置ph,使基板升降部20回到上升位置pp’。基座9和基板升降部20以使升降销13从基座9的上表面突出的状态一体地上升。上升后的升降销13抵接于从基板保持部105h露出的基板w的背面,并将该基板w向基板保持部105h的上方抬升。
66.回到图7,在s106中驱动马达107m(图1),如图12所示,使基板w脱离后的状态的基板搬送构件105a后退。当基板搬送构件105a的后退结束后进入s107,驱动气缸81(图6),使准备室闸门108(图1)成为关闭状态。接下来进入s108使气缸41(图2)工作,如图13所示,仅使基座9上升至第一位置pp。基板升降部20的高度方向位置被维持而升降销13处于静止状态,由此基座9的上表面相对于被升降销13的上端支撑的基板w的背面接近,基板w嵌入该沉
头孔9b(图4)。这样一来,成为在基座9装配有基板w,并且基板w的主表面与预热环32的上表面位置对齐的状态。此时,原料气体流通空间5p的高度方向尺寸被确保为5mm以上15mm以下(本实施方式中,约10mm)的比较小的值。
67.接下来,在s109中使红外线加热灯11工作从而将内部空间5升温至设定温度。在s110中,开始基座9的旋转驱动,在s111中以预定的设定流量开始原料气体的流通。由此,在基板w上成膜硅单晶层。
68.此时,如图13所示,原料气体流通空间5p的高度方向尺寸如上所述地成为小的值,由此实现基板w上硅单晶层的生长速度提高,在谋求生产效率提高方面是有利的。另外,由于基座9靠近红外线加热灯11,因此在将基板w加热至目标温度时的升温速度加快,能够实现加热时间的缩短。另外,原料气体流通空间5p的气体充填速度增加也有助于提高基板w的升温速度。若原料气体流通空间5p的高度方向尺寸超过15mm,则存在使硅单晶层的生长速度提高的效果不够的情况。另一方面,在原料气体流通空间5p的高度方向尺寸不足5mm的情况下,对于原料气体流通空间5p的原料气体的流通阻力过剩,存在难以确保原料气体的流速的情况。
69.此外,反应室1虽然构成为冷壁型的气相生长装置,但在采用这种冷壁型的气相生长装置的情况下,专利文献2中启示了,通过使原料气体的流速增大,在外延生长中,存在能够抑制作为反应生成物的硅沉积物向形成反应容器主体2的石英玻璃的内壁累积的可能性。基于本发明的结构,例如图13那样,通过缩小设定原料气体流通空间5p的高度方向尺寸使原料气体的流速增大,具有能够更有效地抑制硅沉积物向反应容器主体2的内面累积的可能性。例如在实施作为硅源气体使用sih2cl2(二氯硅烷s)、高温(例如1150℃)且低压(例如60torr)下的外延生长等情况下,在采用容易产生硅沉积物的累积的条件的情况下,认为上述的效果会尤其显著地发挥。
70.回到图7,若成膜结束则进入s112,停止基座9的旋转。另外,在s113中,停止原料气体的流通。在s114中,通过使气缸41、42(图2)工作来使基座9移动至基准位置ph,使基板升降部20移动至上升位置pp’。这样一来,成为与图12同样的状态,升降销13上升,成膜结束后的基板w向基板保持部105h的上方抬升。
71.而且,在图7的s115中,驱动气缸81(图6),使准备室闸门108(图1)成为打开状态。在s116中驱动马达107m(图1),使空的状态的基板搬送构件105a前进(与图11同样的状态)。在s117中,通过使气缸41、42(图6)工作,使基座9移动至图2的第二位置ps,使基板升降部20移动至下降位置ps’。基座9与基板升降部20以使升降销13从基座9的上表面突出的状态一体地下降。这样一来,成为与图10同样的状态,被升降销13的上端支撑的成膜后的基板w被基板保持部105h限制下降并置于其上,另一方面,升降销13向基板w的下方脱离。
72.而且,图7的s118中驱动马达107m(图1),使放置有基板w的状态的基板搬送构件105a后退。由此,已成膜的基板w被回收至准备室103。s119中驱动气缸81(图6),使准备室闸门108(图1)成为关闭状态。
73.以上,对本发明的实施方式进行了说明,但本发明并不限定于此。例如,作为上述实施方式中反应室1,例示了通过cvd(chemical vapor deposition:化学气相沉积)制造硅外延晶片的单片式装置,当制造对象物不限于硅外延晶片,本发明也能够应用于在例如青玉、硅等单晶基板上通过movpe(metal-oxide vapor phase epitaxy:金属氧化物气相外
延)使化合物半导体单晶层外延生长的装置。
74.附图标记说明
75.1反应室
76.2反应容器主体
77.5内部空间
78.5p原料气体流通空间
79.5t基板装卸空间
80.7排出管
81.9基座
82.9a套筒
83.9b沉头孔
84.11红外线加热灯
85.12基板升降部升降机构
86.12a升降销驱动臂
87.12b升降套筒
88.12c升降销施力部
89.13升降销
90.14插通孔
91.15旋转轴构件
92.15a轴主体
93.15b热电偶
94.15c结合销
95.15d基座支撑臂
96.20基板升降部
97.21气体排出口
98.22气体导入口
99.32预热环
100.34分隔板
101.36气体通道
102.36a上侧通道空间
103.36b下侧通道空间
104.39基座升降机构
105.40马达
106.41、42气缸
107.100气相生长装置
108.105a基板搬送构件
109.105h基板保持部
110.el硅单晶薄膜
111.ew硅外延晶片
112.pp第一位置
113.ps第二位置
114.o旋转轴线
115.pp主表面
116.w硅单晶基板。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1