MicroLED巨量转移和修复装置、方法及其设备与流程
micro led巨量转移和修复装置、方法及其设备
技术领域
1.本发明涉及一种micro led巨量转移装置,更具体地说是micro led巨量转移和修复装置、方法及其设备。
背景技术:
2.由于microled的尺寸非常小(6微米到20微米之间),因此,在从 microled晶圆上转移到目标基板上就变得非常困难,特别是还要在同一台设备上来检测,并修复损坏或不良的microled芯片则会更加的困难。
3.根据检索关键词“名称,摘要,权利要求书+=(micro led and坏点and 修复)”查有4件相关专利文献。其中有一件名称为micro-led芯片坏点修复方法,它在基板的每个子像素区中均设有主凹槽和备份凹槽,实施起来不一定可靠。
4.因此,本发明人认为有必要开发一种新的microled转移装置,既可以用于巨量转移,也可以用于修复的少量转移。使它也可以用于一体化的 micro-led生产设备。
技术实现要素:
5.本发明的目的是针对现有技术中存在的上述问题,提供micro led巨量转移和修复装置、方法及其设备。
6.本发明的目的通过下列技术方案来实现:
7.本发明micro led巨量转移装置,包括承载有micro led颗粒的原始载台和承载有目标基板的目标载台,及设于所述原始载台和所述目标载台侧边的动力部件;所述原始载台为巨量载台,设有micro led的晶圆片或是已经排列好micro led的储存盘;还包括设于所述原始载台上方的微米级视觉传感器,与所述微米级视觉传感器连接的转移控制电路,与所述转移控制电路连接的asic驱动器,与所述asic驱动器连接的led阵列板,及设于所述 led阵列板前侧的透镜阵列;所述动力部件的活动端设有黏取板,所述黏取板设有紫外光可逆胶层;所述微米级视觉传感器摄取所述原始载台中microled颗粒的分布位置,并转换成图像信号传送至所述转移控制电路;再经所述转移控制电路的处理,转换成控制信号输出至所述asic驱动器;所述asic 驱动器驱动所述led阵列板,以显示相同图像信号,并通过透镜阵列,对所述紫外光可逆胶层进行照射,只让有micro led颗粒分布的位置具有黏力,其他的位置不具有黏力;然后所述动力部件带动所述黏取板至所述原始载台,直接黏取对应位置的micro led颗粒,再移送到目标基板的指定位置,被所述目标基板表面设有的异方性导电胶膜黏住,且micro led颗粒与异方性导电胶膜之间的黏力大于micro led颗粒与所述紫外光可逆胶层之间的黏力,所述动力部件向上移动,实现所述紫外光可逆胶层与micro led颗粒的分离,micro led颗粒被转移至所述目标基板。
8.优选,所述动力部件的活动端与所述黏取板之间设有黏力传感器,于所述黏取板与micro led颗粒分离时,检测出所述黏取板的表面黏力,当检测值低于设定值时,对所述黏取板表面的紫外光可逆胶层进行更换。
9.本发明microled巨量转移方法,采用前述的microled巨量转移装置,包括黏力明显下降步骤和更换紫外光可逆胶层步骤:
10.所述黏力明显下降步骤,是针对第二次巨量转移时,上一次巨量转移的microled颗粒分布位置未被本次巨量转移的分布装置包含的区域,被280-400nm的紫外光照射,黏力明显下降;
11.所述更换紫外光可逆胶层步骤,是在所述动力部件的活动端与所述黏取板之间设有黏力传感器,于所述黏取板与microled颗粒分离时,检测出所述黏取板的表面黏力,当检测值低于设定值时,对所述黏取板表面的紫外光可逆胶层进行更换。
12.本发明microled修复装置,包括承载有microled颗粒的原始载台和承载有目标基板的目标载台,及设于所述原始载台和所述目标载台侧边的动力部件;所述原始载台为良品载台,设有microled良品颗粒;所述目标载台为修复载台,用于microled颗粒的修复;所述目标基板为待修复基板;还包括设于所述原始载台上方的微米级视觉传感器,与所述微米级视觉传感器连接的修复转移控制电路,与所述修复转移控制电路连接的asic驱动器,与所述asic驱动器连接的led阵列板,及设于所述led阵列板前侧的透镜阵列;所述动力部件的活动端设有黏取板,所述黏取板设有紫外光可逆胶层;所述微米级视觉传感器摄取所述修复载台中microled坏点颗粒的分布位置,并转换成图像信号传送至所述修复转移控制电路;再经所述修复转移控制电路的处理,转换成控制信号输出至所述asic驱动器;所述asic驱动器驱动所述led阵列板,以显示二个相同的图像信号,并通过透镜阵列,对所述紫外光可逆胶层进行照射,只让有microled坏点颗粒分布的位置具有黏力,其他的位置不具有黏力;其中一个图像信号产生的黏力分布区域用于黏取microled坏点颗粒,另一个图像信号产生的黏力分布区域用于黏取microled良品颗粒;然后所述动力部件带动所述黏取板至所述修复载台,直接黏取对应位置的microled坏点颗粒,再转移至所述良品载台上方,黏取microled良品颗粒,以送到修复载台的microled坏点颗粒位置,被microled坏点颗粒位置表面设有的纳米导电银浆黏住,且microled良品颗粒与纳米导电银浆之间的黏力大于microled良品颗粒与所述紫外光可逆胶层之间的黏力,所述动力部件向上移动,实现所述紫外光可逆胶层与microled良品颗粒的分离,microled良品颗粒被转移至所述待修复基板;所述修复载台还设有用于点亮所述待修复基板的点亮治具。
13.优选地,所述修复转移控制电路对用于黏取microled坏点颗粒的黏力分布区域,进行累计,其密集度达到黏取板的紫外光可逆胶层的设定值时,发出更换紫外光可逆胶层的信号。
14.本发明microled修复方法,采用前述的修复装置;包括黏力明显下降步骤、移除步骤和照射位置挪动步骤:
15.所述黏力明显下降步骤,是针对第二次修复转移时,上一次修复转移的microled颗粒分布位置未被本次修复转移的分布装置包含的区域,被280-400nm的紫外光照射,黏力明显下降;
16.所述移除步骤,是设有的微米级修复用视觉传感器针对microled坏点颗粒的位置进行拍摄,获得坏点图像信号,再根据所述坏点图像信号,再利用所述led阵列板生成的紫外光对紫外光可逆胶层进行相对应的照射,相对应的位置获得黏力,从而将紫外光可逆胶层贴近待修复基板,将microled坏点颗粒黏住并移除;
17.所述照射位置挪动步骤,是第二次拾取micro led良品颗粒时,所述紫外光可逆胶层被照射的位置不同于上一次拾取micro led良品颗粒时的位置。
18.本发明micro led巨量转移、检测及修复设备,包括底座联接在一起的巨量转移装置、检测装置和修复装置;所述巨量转移装置为前述的microled巨量转移装置;所述修复装置为前述的micro led修复装置。
19.优选地,所述检测装置包括设于机座上的检测工位,设于检测工位侧边且对设于目标基板上的micro led颗粒进行点亮的的点亮治具,及设于所述检测工位上方的微米级检测用视觉传感器;还包括联接所述巨量转移装置与所述检测装置之间的检测滑轨,所述目标基板从所述巨量转移装置滑动至所述检测工位后,经检测合格时,由设有的检测动力部件取走;经检测有micro led坏点颗粒时,设有的检测动力部件将目标基板搬运至修复载台,成为待修复基板。
20.优选地,所述修复载台还设有位于待修复基板下方的超低温探针,压触于micro led坏点颗粒的位置,以对异方性导电胶膜进行黏力消除;所述超低温探针的直径近于20-30μm;还设有微米级修复用视觉传感器,以针对micro led坏点颗粒的位置进行拍摄,获得坏点图像信号,再根据所述坏点图像信号,再利用所述led阵列板生成的紫外光对紫外光可逆胶层进行相对应的照射,相对应的位置获得黏力,从而利用紫外光可逆胶层贴近待修复基板,将micro led坏点颗粒黏住并移除;所述修复装置还设有位于待修复基板上方的导电银桨棒,所述导电银桨棒的末端沾有纳米导电银浆,所述导电银桨棒对micro led坏点颗粒的位置进行纳米导电银浆的涂抹。
21.优选地,所述修复装置设有的修复动力部件根据坏点图像信号利用所述黏取板从所述原始载台黏取相应的micro led良品颗粒,植入至所述修复载台的待修复基板的micro led坏点颗粒位置;所述修复载台设有用于承载所述待修复基板的网状层,所述超低温探针穿过所述网状层,以低于-70℃以下的温度压触于micro led坏点颗粒的下方,解除micro led坏点颗粒与待修复基板之间的黏力;还包括水平面驱动部件,用于驱动所述网状层,以避开所述网状层的实体部分对所述超低温探针的阻挡。
22.本发明还公开了另外一种micro led巨量转移、检测及修复设备,它包括巨量转移单元、检测单元和坏点修复单元;
23.巨量转移单元包括机台一、机械臂一、巨量转移装置、基板、基板转移装置、硅片固定装置、精度定位装置和基板固定装置;基板设置在基板固定装置上;硅片固定装置和基板固定装置分别设置在机台一的进料端和出料端上;巨量转移装置设置在硅片固定装置和基板固定装置之间,巨量转移装置上设置有可黏力调节的紫外光可逆胶层;精度定位装置设置在巨量转移装置上;机械臂一设置在硅片固定装置的一侧,用于控制来料;基板转移装置设置在基板固定装置的一侧,用于控制出料。
24.检测单元包括机台二、机械臂二、待检测基板、点亮检测装置、点亮动作装置、点亮测位装置、点亮控制装置和点亮捕捉装置;点亮控制装置和点亮动作装置设置在机台二的进料端上;待检测基板设置在点亮控制装置上;点亮检测装置设置在点亮动作装置上;点亮测位装置设置在点亮检测装置上;点亮捕捉装置设置在点亮测位装置上;机械臂二设置在机台二的出料端上,用于取出合格品。
25.坏点修复单元包括机台三、机械臂三、上加热装置、修复动作装置、不良基板、植入
装置、修复转移组件、修复硅片固定装置和下加热装置;下加热装置和修复动作装置设置在机台三靠近机台二的一侧;不良基板设置在下加热装置上;上加热装置和植入装置设置在修复动作装置上;修复硅片固定装置设置在机台三远离机台二的一侧;修复转移组件设置在修复硅片固定装置和修复动作装置之间;机械臂三设置在修复硅片固定装置的一侧,用于修复硅片的进料。
26.优选的,巨量转移单元、检测单元和坏点修复单元为集成一体式结构。
27.优选的,机台一上设置有滑轨一;基板固定装置滑动设置在滑轨一上。
28.优选的,精度定位装置上设置有机器视觉系统,包括高清镜头和ccd相机,识别精度达到6微米以下。
29.优选的,机器视觉系统是对micro led的晶圆片或是已经排列好microled的储存盘进行辨识,经过影像讯号处理和算法之后,再将led芯片分布的影像转成数字讯号,以搭配具有asic驱动芯片、排成陣列的led透镜和旋转镜面及扫描系统所构成的系统。
30.优选的,巨量转移装置通过机器视觉系统投影,让有micro led分布区域的紫外光可逆胶层具有黏力,其他的位置不具有黏力。
31.优选的,机台二上设置有滑轨二;滑轨二设置在机台一和机台三之间;点亮控制装置滑动设置在滑轨二上。
32.优选的,修复转移组件包括修复转移装置一、修复转移装置二、颗粒固定装置、滑轨三、滑轨四和安装架一;滑轨三设置在机台三上,位于修复动作装置的下方;修复转移装置一滑动设置在滑轨三上;安装架一设置在滑轨二的上方,位于修复动作装置和机械臂三之间;滑轨二设置在安装架一上;修复转移装置二滑动设置在滑轨二上;修复转移装置一和修复转移装置二上均设置有颗粒固定装置。
33.优选的,修复硅片固定装置上设置有修复硅片固定动作装置。
34.优选的,机台一上设置有安装架二;安装架二上设置有滑轨四;巨量转移装置和基板转移装置滑动设置在滑轨四上。
35.与现有技术相比,本发明的有益效果为:本发明micro led转移装置因采用了微米级视觉传感器,获得micro led颗粒的分布位置,再通过asic 驱动器来驱动led阵列板,经过透镜阵列,对黏取板中的紫外光可逆胶层进行定向投射曝光,获得精准的可黏贴区域,进而以此对micro led颗粒进行精准黏贴,实现micro led颗粒的转移,可以用于载体变化时的巨量转移,也可以用于修复时的少量转移。进一步地,采用黏力传感器,利用分离动作获取紫外光可逆胶层的黏力,以便及时更换新的紫外光可逆胶层,提高了生产效率。本发明micro led转移一体化设备利用底座联接在一起的巨量转移装置、检测装置和修复转移装置,成为一台紧凑型的设备,让设备的效率大幅提高;效率和良率更高、成本更低、工艺更简单;且透过材料科技,让非常困难的micro led的巨量转移、检测和修复工作可以非常快速有效的完成,更能促进micro led显示产业能快速蓬勃发展。
附图说明
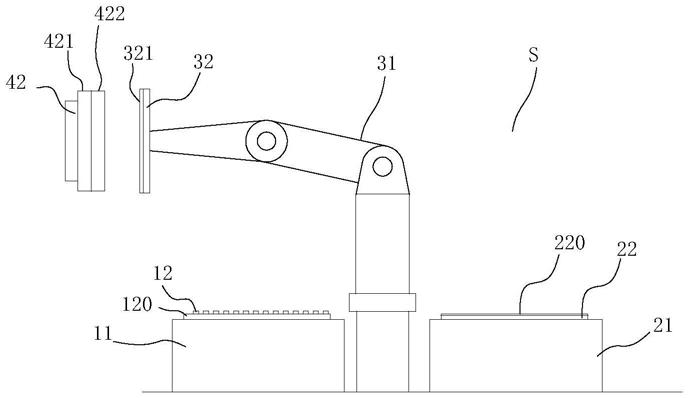
36.图1为本发明micro led转移装置具体实施例一的结构示意图(动力部件为多轴旋转机器人结构,led陈列板侧立放置);
37.图2为本发明micro led转移装置具体实施例二的结构示意图(动力部件为滑轨式
机械臂结构,led陈列板朝上放置);
38.图3为图1和图2实施例的电路方框图;
39.图4为本发明micro led巨量转移、检测及修复设备具体实施例一的结构示意图;
40.图5为图4中的修复转移装置局部放大图;
41.图6为图4实施例的电路方框图;
42.图7为本发明micro led巨量转移、检测及修复设备其它实施例的正视图;
43.图8为本发明micro led巨量转移、检测及修复设备其它实施例的俯视图;
44.图9为本发明micro led巨量转移、检测及修复设备其它实施例的立体结构示意图。
45.图1-6的附图标记:
46.s
ꢀꢀꢀꢀꢀꢀ
转移装置
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
s1
ꢀꢀꢀꢀꢀꢀꢀ
巨量转移装置
47.s2
ꢀꢀꢀꢀꢀ
修复装置
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀqꢀꢀꢀꢀꢀꢀꢀꢀ
检测装置
48.11
ꢀꢀꢀꢀꢀ
原始载台
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
12
ꢀꢀꢀꢀꢀꢀꢀ
micro led颗粒
49.21
ꢀꢀꢀꢀꢀ
目标载台
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
22
ꢀꢀꢀꢀꢀꢀꢀ
目标基板
50.31
ꢀꢀꢀꢀꢀ
动力部件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
32
ꢀꢀꢀꢀꢀꢀꢀ
黏取板
51.40
ꢀꢀꢀꢀꢀ
转移控制电路
ꢀꢀꢀꢀꢀꢀꢀ
41
ꢀꢀꢀꢀꢀꢀꢀ
微米级视觉传感器
52.42
ꢀꢀꢀꢀꢀ
asic驱动器
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
421
ꢀꢀꢀꢀꢀꢀ
阵列板
53.422
ꢀꢀꢀꢀ
透镜阵列
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
50
ꢀꢀꢀꢀꢀꢀꢀ
检测工位
54.51
ꢀꢀꢀꢀꢀ
点亮治具
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
52
ꢀꢀꢀꢀꢀꢀꢀ
微米级检测用视觉传感器
55.53
ꢀꢀꢀꢀꢀ
检测滑轨
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
54
ꢀꢀꢀꢀꢀꢀꢀ
检测动力部件
56.60
ꢀꢀꢀꢀꢀ
修复载台
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
61
ꢀꢀꢀꢀꢀꢀꢀ
待修复基板
57.62
ꢀꢀꢀꢀꢀ
超低温探针
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
63
ꢀꢀꢀꢀꢀꢀꢀ
微米级修复用视觉传感器
58.64
ꢀꢀꢀꢀꢀ
导电银桨棒
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
65
ꢀꢀꢀꢀꢀꢀꢀ
修复动力部件
59.66
ꢀꢀꢀꢀꢀ
良品载台
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
67
ꢀꢀꢀꢀꢀꢀꢀ
网状层
60.70
ꢀꢀꢀꢀꢀ
总控制器
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
120
ꢀꢀꢀꢀꢀꢀ
micro led原始载体
61.220
ꢀꢀꢀꢀ
异方性导电胶膜
ꢀꢀꢀꢀꢀ
500
ꢀꢀꢀꢀꢀꢀ
检测控制电路
62.600
ꢀꢀꢀꢀ
修复转移控制电路
ꢀꢀꢀ
69
ꢀꢀꢀꢀꢀꢀꢀ
micro led良品颗粒
63.31a
ꢀꢀꢀꢀ
动力部件
64.图7-9的附图标记:
65.1、巨量转移单元;2、检测单元;3、坏点修复单元;4、控制系统; 01、机台一;02、机台二;03、机台三;04、机械臂一;05、机械臂二; 06、机械臂三;104、巨量转移装置;105、基板;106、基板转移装置;107、硅片固定装置;108、精度定位装置;109、基板固定装置;201、待检测基板;202、点亮检测装置;203、点亮动作装置;204、点亮测位装置;205、点亮控制装置;206、点亮捕捉装置;301、上加热装置;302、修复动作装置;303、不良基板;304、植入装置;305、修复转移装置一;306、修复转移装置二;307、修复硅片固定装置;311、修复硅片固定动作装置;312、下加热装置;313、颗粒固定装置。
具体实施方式
66.下面将通过以下实施例进行清楚、完整地描述本发明的技术方案中显然,以下将
描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
67.应当理解,当在本说明书和所附权利要求书中使用时,术语“包括”和“包含”指示所描述特征、整体、步骤、操作、元素和/或组件的存在,但并不排除一个或多个其它特征、整体、步骤、操作、元素、组件和/或其集合的存在或添加。
68.还应当理解,在此本发明实施例说明书中所使用的术语仅仅是出于描述特定实施例的目的而并不意在限制本发明实施例。如在本实用新型实施例说明书和所附权利要求书中所使用的那样,除非上下文清楚地指明其它情况,否则单数形式的“一”、“一个”及“该”意在包括复数形式。
69.特别强调附图中的结构为放大之后的示意图表达,各个部门的放大比例不相同,目的是为了更清楚地表达本发明设备在工作时结构原理。
70.如图1-3所示,本发明micro led转移装置s,包括承载有micro led颗粒12的原始载台11和承载有目标基板22的目标载台21,及设于原始载台11 和目标载台21侧边的动力部件31;还包括设于原始载台11上方的微米级视觉传感器41,与微米级视觉传感器41连接的转移控制电路40,与转移控制电路40连接的asic驱动器42,与asic驱动器42连接的led阵列板421,及设于led阵列板421前侧的透镜阵列422;动力部件31的活动端设有黏取板32,黏取板32设有紫外光可逆胶层321;微米级视觉传感器41摄取原始载台11 中micro led颗粒的分布位置,并转换成图像信号传送至转移控制电路40;再经转移控制电路40的处理,转换成控制信号输出至asic驱动器42;asic 驱动器42驱动led阵列板421,以显示相同图像信号,并通过透镜阵列422,对紫外光可逆胶层进行照射,只让有micro led颗粒分布的位置具有黏力,其他的位置不具有黏力;然后动力部件31带动黏取板32至原始载台11,直接黏取对应位置的micro led颗粒,再移送到目标基板22的指定位置,被目标基板22表面设有的异方性导电胶膜黏住,且micro led颗粒与异方性导电胶膜之间的黏力大于micro led颗粒与紫外光可逆胶层之间的黏力,动力部件31向上移动,实现紫外光可逆胶层与micro led颗粒的分离,micro led 颗粒被转移至目标基板22。
71.更具体地,原始载台可以是巨量载台,设有micro led的晶圆片或是已经排列好micro led的储存盘。所以也称之为micro led巨量转移装置。
72.于其它实施例中,动力部件的活动端与黏取板之间设有黏力传感器,于黏取板与micro led颗粒分离时,检测出黏取板的表面黏力,当检测值低于设定值时,对黏取板表面的紫外光可逆胶层进行更换。
73.本发明还公开了micro led巨量转移方法,采用前述的micro led巨量转移装置,包括黏力明显下降步骤和更换紫外光可逆胶层步骤:
74.黏力明显下降步骤,是针对第二次巨量转移时,上一次巨量转移的 micro led颗粒分布位置未被本次巨量转移的分布装置包含的区域,被280-400nm的紫外光照射,黏力明显下降;
75.更换紫外光可逆胶层步骤,是在动力部件的活动端与黏取板之间设有黏力传感器,于黏取板与micro led颗粒分离时,检测出黏取板的表面黏力,当检测值低于设定值时,对黏取板表面的紫外光可逆胶层进行更换。
76.图1-3的实施例,用于修复时,原始载台也可以是良品载台,设有microled良品颗粒。成为microled修复装置,具体结构为:
77.目标载台为修复载台,用于microled颗粒的修复;目标基板为待修复基板;还包括设于原始载台上方的微米级视觉传感器,与微米级视觉传感器连接的修复转移控制电路,与修复转移控制电路连接的asic驱动器,与asic驱动器连接的led阵列板,及设于led阵列板前侧的透镜阵列;动力部件的活动端设有黏取板,黏取板设有紫外光可逆胶层;微米级视觉传感器摄取修复载台中microled坏点颗粒的分布位置,并转换成图像信号传送至修复转移控制电路;再经修复转移控制电路的处理,转换成控制信号输出至asic驱动器;asic驱动器驱动led阵列板,以显示二个相同的图像信号,并通过透镜阵列,对紫外光可逆胶层进行照射,只让有microled坏点颗粒分布的位置具有黏力,其他的位置不具有黏力;其中一个图像信号产生的黏力分布区域用于黏取microled坏点颗粒,另一个图像信号产生的黏力分布区域用于黏取microled良品颗粒;然后动力部件带动黏取板至修复载台,直接黏取对应位置的microled坏点颗粒,再转移至良品载台上方,黏取microled良品颗粒,以送到修复载台的microled坏点颗粒位置,被microled坏点颗粒位置表面设有的纳米导电银浆黏住,且microled良品颗粒与纳米导电银浆之间的黏力大于microled良品颗粒与紫外光可逆胶层之间的黏力,动力部件向上移动,实现紫外光可逆胶层与microled良品颗粒的分离,microled良品颗粒被转移至待修复基板;所述修复载台还设有用于点亮所述待修复基板的点亮治具。
78.也就是利用图1-3所示的结构,但是其中的紫外光可逆胶层有双重作用,一部分用来microled坏点颗粒;另外一部分用于黏取microled良品颗粒。更具体地,修复转移控制电路对用于黏取microled坏点颗粒的黏力分布区域,进行累计,其密集度达到黏取板的紫外光可逆胶层的设定值时,发出更换紫外光可逆胶层的信号。
79.本发明microled修复方法,采用前述的修复装置;包括黏力明显下降步骤、移除步骤和照射位置挪动步骤:
80.黏力明显下降步骤,是针对第二次修复转移时,上一次修复转移的microled颗粒分布位置未被本次修复转移的分布装置包含的区域,被280-400nm的紫外光照射,黏力明显下降;
81.移除步骤,是设有的微米级修复用视觉传感器针对microled坏点颗粒的位置进行拍摄,获得坏点图像信号,再根据坏点图像信号,再利用led阵列板生成的紫外光对紫外光可逆胶层进行相对应的照射,相对应的位置获得黏力,从而将紫外光可逆胶层贴近待修复基板,将microled坏点颗粒黏住并移除;
82.照射位置挪动步骤,是第二次拾取microled良品颗粒时,紫外光可逆胶层被照射的位置不同于上一次拾取microled良品颗粒时的位置。
83.如图4至图6所示的实施例,本发明microled巨量转移、检测及修复设备,包括底座联接在一起的巨量转移装置s1、检测装置q和修复装置s2;巨量转移装置s1为前述的microled巨量转移装置、修复装置s2为前述的microled修复装置。
84.更具体地,检测装置q包括设于机座上的检测工位50,设于检测工位50侧边且对设于目标基板上的microled颗粒进行点亮的点亮治具51,及设于检测工位50上方的微米级检测用视觉传感器52。
85.更具体地,还包括联接巨量转移装置s1与检测装置q之间的检测滑轨 53,目标基板从巨量转移装置的目标载台滑动至检测工位50后,经检测合格时,由设有的检测动力部件54取走;经检测有micro led坏点颗粒时,设有的检测动力部件54将目标基板搬运至修复载台60,成为待修复基板61。
86.更具体地,修复载台60还设有位于待修复基板61下方的超低温探针62,压触于micro led坏点颗粒的位置,以对异方性导电胶膜进行黏力消除;超低温探针的直径近于20-30μm;;修复载台60还设有用于点亮待修复基板 61的点亮治具(图中未示出);还设有微米级修复用视觉传感器63,以针对micro led坏点颗粒的位置进行拍摄,获得坏点图像信号,再根据坏点图像信号,再利用led阵列板生成的紫外光对紫外光可逆胶层进行相对应的照射,相对应的位置获得黏力,从而利用紫外光可逆胶层贴近待修复基板61,将micro led坏点颗粒黏住并移除;修复装置s2还设有位于待修复基板61 上方的导电银桨棒64,导电银桨棒64的末端沾有纳米导电银浆,导电银桨棒64对micro led坏点颗粒的位置进行纳米导电银浆的涂抹。
87.更具体地,修复装置s2的修复动力部件65根据坏点图像信号利用黏取板从原始载台(又叫良品载台66)黏取相应的micro led良品颗粒,植入至修复载台60的待修复基板61的micro led坏点颗粒位置。
88.更具体地,修复载台60设有用于承载待修复基板61的网状层67,超低温探针62穿过网状层67,以低于-70℃以下的温度压触于micro led坏点颗粒的下方,解除micro led坏点颗粒与目标基板之间的黏力。还包括水平面驱动部件,用于驱动网状层,以避开网状层的实体部分对超低温探针的阻挡。待修复基板61修复好之后送回检测装置,再重新接上点亮治具,进行点亮测试以确认修复工作顺利完成,检测无误之后,再由检测动力部件移送至下一个合格的工序。
89.为了实现巨量转移装置、检测装置和修复装置的一体化操作,还需要一个总控制器70,以对巨量转移装置、检测装置和修复装置进行协同控制。
90.图7-9还公开了本发明一种micro led巨量转移、检测及修复设备的其它实施例,具体说明如下:
91.实施例一
92.如图7所示,本发明提出的micro led巨量转移、检测及修复设备,包括巨量转移单元1、检测单元2、坏点修复单元3和控制系统4。
93.如图8-9所示,巨量转移单元1包括机台一01、机械臂一04、巨量转移装置104、基板105、基板转移装置106、硅片固定装置107、精度定位装置 108和基板固定装置109;基板105设置在基板固定装置109上;硅片固定装置107和基板固定装置109分别设置在机台一01的进料端和出料端上;巨量转移装置104设置在硅片固定装置107和基板固定装置109之间,巨量转移装置104上设置有可黏力调节的紫外光可逆胶层;精度定位装置108设置在巨量转移装置104上;机械臂一04设置在硅片固定装置107的一侧,用于控制来料;基板转移装置106设置在基板固定装置109的一侧,用于控制出料。
94.如8-9所示,检测单元2包括机台二02、机械臂二05、待检测基板201、点亮检测装置202、点亮动作装置203、点亮测位装置204、点亮控制装205 和点亮捕捉装置206;点亮控制装置205和点亮动作装置203设置在机台二02 的进料端上;待检测基板201设置在点亮控制
装置205上;点亮检测装置202 设置在点亮动作装置203上;点亮测位装置204设置在点亮检测装置202上;点亮捕捉装置206设置在点亮测位装置204上;机械臂二05设置在机台二02 的出料端上,用于取出合格品。
95.如图8-9所示,坏点修复单元3包括机台三03、机械臂三06、上加热装置301、修复动作装置302、不良基板303、植入装置304、修复转移组件、修复硅片固定装置307和下加热装置312;下加热装置312和修复动作装置 302设置在机台三03靠近机台二02的一侧;不良基板303设置在下加热装置 312上;上加热装置301和植入装置304设置在修复动作装置302上;修复硅片固定装置307设置在机台三03远离机台二02的一侧;修复转移组件设置在修复硅片固定装置307和修复动作装置302之间;机械臂三06设置在修复硅片固定装置307的一侧,用于修复硅片的进料。
96.实施例二
97.如图7所示,本发明提出的micro led巨量转移、检测及修复设备,包括巨量转移单元1、检测单元2、坏点修复单元3和控制系统4。巨量转移单元1、检测单元2和坏点修复单元3为集成一体式结构。
98.如图8-9所示,巨量转移单元1包括机台一01、机械臂一04、巨量转移装置104、基板105、基板转移装置106、硅片固定装置107、精度定位装置 108和基板固定装置109;基板105设置在基板固定装置109上;硅片固定装置107和基板固定装置109分别设置在机台一01的进料端和出料端上;巨量转移装置104设置在硅片固定装置107和基板固定装置109之间,巨量转移装置104上设置有可黏力调节的紫外光可逆胶层;精度定位装置108设置在巨量转移装置104上;机械臂一04设置在硅片固定装置107的一侧,用于控制来料;基板转移装置106设置在基板固定装置109的一侧,用于控制出料。
99.更具体地,机台一01上设置有滑轨一;基板定装置109滑动设置在滑轨一上。
100.更具体地,精度定位装置108上设置有机器视觉系统,包括高清镜头和ccd相机,识别精度达到6微米以下。机器视觉系统是对micro led的晶圆片或是已经排列好micro led的储存盘进行辨识,经过影像讯号处理和算法之后,再将led芯片分布的影像转成数字讯号,以搭配具有asic驱动芯片、排成陣列的led透镜和旋转镜面及扫描系统所构成的系统。
101.更具体地,巨量转移装置104通过机器视觉系统投影,让有micro led 分布区域的紫外光可逆胶层具有黏力,其他的位置不具有黏力。
102.更具体地,机台一01上设置有安装架二;安装架二上设置有滑轨四;巨量转移装置104和基板转移装置106滑动设置在滑轨四上。
103.如图8-9所示,检测单元2包括机台二02、机械臂二05、待检测基板201、点亮检测装置202、点亮动作装置203、点亮测位装置204、点亮控制装置205 和点亮捕捉装置206;点亮控制装置205和点亮动作装置203设置在大理石机台二02的进料端上;待检测基板201设置在点亮控制装置205上;点亮检测装置202设置在点亮动作装置203上;点亮测位装置204设置在点亮检测装置 202上;点亮捕捉装置206设置在点亮测位装置204上;机械臂二05设置在机台二02的出料端上,用于取出合格品。
104.更具体地,机台二02上设置有滑轨二;滑轨二设置在机台一01和机台三03之间;点亮控制装置205滑动设置在滑轨二上。
105.如图8-9所示,坏点修复单元3包括机台三03、机械臂三06、上加热装置301、修复动
作装置302、不良基板303、植入装置304、修复转移组件、修复硅片固定装置307和下加热装置312;下加热装置312和修复动作装置 302设置在机台三03靠近机台二02的一侧;不良基板303设置在下加热装置 312上;上加热装置301和植入装置304设置在修复动作装置302上;修复硅片固定装置307设置在机台三03远离机台二02的一侧;修复转移组件设置在修复硅片固定装置307和修复动作装置302之间;机械臂三06设置在修复硅片固定装置307的一侧,用于修复硅片的进料。
106.更具体地,修复转移组件包括修复转移装置一305、修复转移装置二 306、颗粒固定装置313、滑轨三、滑轨四和安装架一;滑轨三设置在机台三03上,位于修复动作装置302的下方;修复转移装置一305滑动设置在滑轨三上;安装架一设置在滑轨二的上方,位于修复动作装置302和机械臂三 06之间;滑轨二设置在安装架一上;修复转移装置二306滑动设置在滑轨二上;修复转移装置一305和修复转移装置二306上均设置有颗粒固定装置 313。
107.更具体地,修复硅片固定装置307上设置有修复硅片固定动作装置311。
108.本发明的先以高分辨率并可清楚识别6微米以下的机器视觉系统(镜头 +ccd),来对micro led的晶圆片或是已经排列好micro led的储存盘来进行辨识,经过影像讯号处理和算法之后,再将led芯片分布的影像转成数字讯号,以搭配具有asic驱动芯片、排成陣列的led透镜、和旋转镜面及扫描系统所构成的系统,投射在巨量转移装置104的紫外光可逆胶(又叫做光可逆胶粘剂)的表面,只让有micro led分布的位置具有黏力,其他的位置不具有黏力,然后直接黏取硅片固定装置107对应位置的micro led,黏好之后,再移动到目标基板105的指定位置,来进行巨量转移。等转移完成之后,巨量转移装置104会自动重新回归到起始位置,准备对下一片micro led的晶圆片或是已经排列好的储存盘来进行重新辨识。此时将重新进行机器视觉的识别,若micro led的分布位置与前一次不同,本设备会针对相对应的位置和利用二种不同波长的紫外光来对黏着机构表面的黏力来进行调节,然后再黏取芯片和完成巨量转移。
109.基板转移装置106转移基板105上的micro led芯片。点亮检测装置202、点亮动作装置203、点亮测位装置204、点亮控制装置205配合,进行点亮测试。该过程中通过精密光学测量装置以及精密机械传动、光栅定位装置、控制系统,到达定位位置即可点亮,继而通过光学检测装置定位坏点位置并做系统位置标记,合格点亮产品通过机械臂二05转移至设备外,不良产品移动至不良基板303上。先以极小的超低温探针(可达-70℃以下的低溫) 针对坏的micro led颗粒先进行解焊,及去除异方性导电胶膜的黏力,再透过紫外光控制系统,精准的让黏着机构的表面只会对不良micro led的位置具有黏力,并将不良的micro led芯片进行拔除。上加热装置301和下加热装置312对精准孔加热。修复转移组件将好的micro led颗粒从修复硅片固定装置307转移至已经拔除的位置上,重新点上导电银浆。如此便完成microled的修复工作,修复好之后再重新接上点亮治具,进行点亮测试以确认修复工作顺利完成。
110.综上所述,本发明micro led转移装置因采用了微米级视觉传感器,获得micro led颗粒的分布位置,再通过asic驱动器来驱动led阵列板,经过透镜阵列,对黏取板中的紫外光可逆胶层进行定向投射曝光,获得精准的可黏贴区域,进而以此对micro led颗粒进行精准黏贴,实现micro led颗粒的转移,可以用于载体变化时的巨量转移,也可以用于修复时的少量转移。进一步地,采用黏力传感器,利用分离动作获取紫外光可逆胶层的黏力,以
便及时更换新的紫外光可逆胶层,提高了生产效率。本发明micro led 转移一体化设备利用底座联接在一起的巨量转移装置、检测装置和修复转移装置,成为一台紧凑型的设备,让设备的效率大幅提高;效率和良率更高、成本更低、工艺更简单;且透过材料科技,让非常困难的micro led 的巨量转移、检测和修复工作可以非常快速有效的完成,更能促进microled显示产业能快速蓬勃发展。
111.上述仅以实施例来进一步说明本发明的技术内容,以便于读者更容易理解,但不代表本发明的实施方式仅限于此,任何依本发明所做的技术延伸或再创造,均受本发明的保护。本发明的保护范围以权利要求书为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1