输送系统、输送装置和输送方法与流程
1.本发明涉及输送系统、输送装置和输送方法。
背景技术:
2.已知有使用在外周缘部配置有多个摄像机的检查用晶片的输送装置的示教方法(例如,参照专利文献1)。
3.已知有调整聚焦环(环状部件)的输送位置而使聚焦环(环状部件)的载置位置的精度提高的方法(例如,参照专利文献2)。
4.现有技术文献
5.专利文献
6.专利文献1:日本特开2019-102728号公报
7.专利文献2:日本特开2020-096122号公报
技术实现要素:
8.发明要解决的技术问题
9.本发明提供能够使对输送机器人的示教自动化的技术。
10.用于解决技术问题的技术手段
11.本发明的一方式的输送系统包括:基于动作指示利用末端执行器输送输送对象物的输送机器人;和将上述动作指示输出到上述输送机器人的控制部,上述末端执行器和上述输送对象物中的至少任一者具有传感器和摄像机(照相机、拍摄设备)中的至少任一者,上述控制部基于上述传感器的检测结果和上述摄像机的撮影结果中的至少任一者,计算上述末端执行器与上述输送对象物的相对位置,上述控制部基于上述相对位置决定上述末端执行器相对于上述输送对象物的教示位置,将上述动作指示输出到上述输送机器人以使得在该教示位置配置该末端执行器。
12.发明效果
13.依照本发明,能够使对输送机器人的示教自动化。
附图说明
14.图1是表示实施方式的处理系统的一个例子的图。
15.图2是表示实施方式的等离子体处理系统的一个例子的图。
16.图3是表示实施方式的等离子体处理装置的一个例子的图。
17.图4是真空输送机器人的叉形部件与基片的相对位置的说明图。
18.图5是大气输送机器人的叉形部件与基片的相对位置的说明图。
19.图6是表示静电电容传感器的一个例子的图。
20.图7是表示静电电容传感器的另一个例子的图。
21.图8是表示大气输送机器人的位置对准方法的一个例子的图。
22.图9是表示大气输送机器人、对准器与机器人端口的位置对准的一个例子的图。
23.图10是表示大气输送机器人与收纳器的位置对准的一个例子的图。
24.图11是表示大气输送机器人与收纳器的位置对准的另一个例子的图。
25.图12是表示大气输送机器人与装载锁定模块的位置对准的一个例子的图。
26.图13是表示大气输送机器人与装载锁定模块的位置对准的另一个例子的图。
27.图14是表示真空输送机器人的位置对准方法的一个例子的图。
28.图15是表示真空输送机器人与装载锁定模块的位置对准的一个例子的图。
29.图16是表示真空输送机器人与处理模块的位置对准的一个例子的图。
30.图17是实施方式的第一结构例的输送装置的末端执行器的俯视图。
31.图18是说明实施方式的第一结构例的输送装置的末端执行器与基片的相对位置的图。
32.图19是说明实施方式的第一结构例的输送装置的末端执行器与环状部件的相对位置的图。
33.图20是实施方式的第二结构例的输送装置的末端执行器的俯视图。
34.图21是说明由实施方式的第二结构例的输送装置的末端执行器进行的基片的位置偏离的测量的图。
35.图22是说明由实施方式的第二结构例的输送装置的末端执行器进行的基片的位置偏离的测量的图。
36.图23是说明由实施方式的第二结构例的输送装置的末端执行器进行的基片的位置偏离的测量的图。
37.图24是实施方式的第三结构例的输送装置的末端执行器的仰视图。
38.图25是本实施方式的输送机器人的末端执行器的俯视图。
39.图26是本实施方式的输送机器人的末端执行器的仰视图。
40.图27是说明由本实施方式的输送机器人的末端执行器进行的基片的位置偏离的测量的图。
41.图28是说明由本实施方式的输送机器人的末端执行器进行的基片的位置偏离的测量的图。
42.图29是说明由本实施方式的输送机器人的末端执行器进行的基片的位置偏离的测量的图。
43.图30是说明本实施方式的输送系统的处理的流程图。
44.图31是说明本实施方式的输送系统的处理的流程图。
45.图32是说明本实施方式的输送系统的处理的流程图。
46.图33是说明本实施方式的输送系统的处理的图。
具体实施方式
47.以下,参照所附的附图,对本发明的非限定性的例示的实施方式进行说明。在所附的所有附图中,对相同或者相应的部件或零件,标注相同的附图标记,并省略重复的说明。
48.《第一实施方式》
49.[处理系统]
[0050]
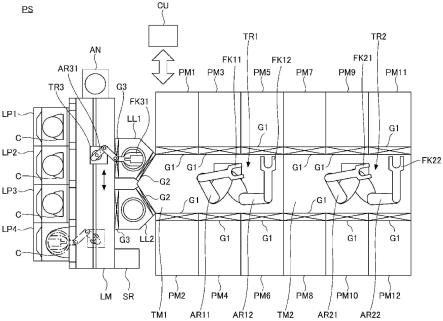
参照图1,对实施方式的处理系统的一个例子进行说明。如图1所示,处理系统ps是能够对基片实施等离子体处理等的各种处理的系统。
[0051]
处理系统ps包括真空输送模块tm1、tm2、处理模块pm1~pm12、装载锁定模块ll1、ll2、大气输送模块lm、对准器(调节器、定位器(aligner))an、收纳器sr等。
[0052]
真空输送模块tm1、tm2分别具有俯视时呈大致四边形的形状。真空输送模块tm1在相对的2个侧面连接有处理模块pm1~pm6。真空输送模块tm1的其他相对的2个侧面中,在一个侧面连接有装载锁定模块ll1、ll2,在另一个侧面连接有用于与真空输送模块tm2连接的通道(未图示)。真空输送模块tm1的供装载锁定模块ll1、ll2连接的侧面,具有与2个装载锁定模块ll1、ll2相配合的角度。真空输送模块tm2在相对的2个侧面连接有处理模块pm7~pm12。真空输送模块tm2的其他相对的2个侧面中,在一个侧面连接有用于与真空输送模块tm1连接的通道(未图示)。真空输送模块tm1、tm2具有真空气氛的真空室,在内部分别配置有真空输送机器人tr1、tr2。
[0053]
真空输送机器人tr1、tr2构成为可转动、伸缩、升降的。真空输送机器人tr1、tr2基于后述的控制部cu输出的动作指示输送输送对象物。例如,真空输送机器人tr1利用配置于前端的叉形部件(叉部)fk11、fk12保持输送对象物,在装载锁定模块ll1、ll2、处理模块pm1~pm6和通道(未图示)之间输送输送对象物。例如,真空输送机器人tr2利用配置于前端的叉形部件fk21、fk22保持输送对象物,在处理模块pm7~pm12和通道(未图示)之间输送输送对象物。此外,叉形部件也称为拾取器、末端执行器。
[0054]
输送对象物包含基片和消耗部件。基片例如为半导体晶片、传感器晶片。消耗部件为可更换地安装于处理模块pm1~pm12内的部件,是由于在处理模块pm1~pm12内进行等离子体处理等的各种处理而消耗的部件。消耗部件例如包含构成后述的环状组件112、喷淋头13的部件。
[0055]
处理模块pm1~pm12具有处理室,具有配置于内部的工作台(载置台)。处理模块pm1~pm12在工作台设置了基片之后,将内部减压而导入处理气体,施加rf电功率而生成等离子体,利用等离子体对基片实施等离子体处理。真空输送模块tm1、tm2和处理模块pm1~pm12由可开闭的闸门(gate valve)g1分隔。
[0056]
装载锁定模块ll1、ll2配置于真空输送模块tm1与大气输送模块lm之间。装载锁定模块ll1、ll2具有能够将内部切换为真空、大气压的内压可变室。装载锁定模块ll1、ll2具有配置于内部的工作台。装载锁定模块ll1、ll2将基片从大气输送模块lm送入真空输送模块tm1时,将内部维持为大气压而从大气输送模块lm接收基片,将内部减压而向真空输送模块tm1送入基片。装载锁定模块ll1、ll2在将基片从真空输送模块tm1向大气输送模块lm送出时,将内部维持为真空而从真空输送模块tm1接收基片,将内部升压至大气压而向大气输送模块lm送入基片。装载锁定模块ll1、ll2和真空输送模块tm1由可开闭的闸门g2分隔。装载锁定模块ll1、ll2和大气输送模块lm由可开闭的闸门g3分隔。
[0057]
大气输送模块lm与真空输送模块tm1相对地配置。大气输送模块lm例如可以是efem(equipment front end module:设备前端模块)。大气输送模块lm为长方体状,具有ffu(fan filter unit:风机过滤器),是被保持为大气压气氛的大气输送室。在大气输送模块lm的沿长度方向的一个侧面,连接有2个装载锁定模块ll1、ll2。在大气输送模块lm的沿长度方向的另一个侧面,连接有机器人端口(端阜)lp1~lp4。在机器人端口lp1~lp4,能够
载置收纳多个(例如25个)基片的容器c。容器c例如可以是foup(front-opening unified pod:前开式晶片传送盒)。在大气输送模块lm内,配置有输送输送对象物的大气输送机器人tr3。
[0058]
大气输送机器人tr3构成为能够沿大气输送模块lm的长度方向移动,并且构成能够转动、伸缩、升降。大气输送机器人tr3基于后述的控制部cu输出的动作指示来输送输送对象物。例如,大气输送机器人tr3利用配置于前端的叉形部件fk31保持输送对象物,在机器人端口lp1~lp4、装载锁定模块ll1、ll2、对准器an和收纳器sr之间输送输送对象物。
[0059]
对准器an连接于大气输送模块lm的沿宽度方向的一个侧面。不过,对准器an也可以与大气输送模块lm的沿长度方向的侧面连接。此外,对准器an也可以设置于大气输送模块lm的内部。对准器an具有支承台、光学传感器(均未图示)等。此处所说的对准器,是指检测输送对象物的位置的装置。
[0060]
支承台是能够以在铅垂方向上延伸的轴线为中心旋转的台,构成为能够在其上支承基片。支承台在驱动装置(未图示)的作用下旋转。驱动装置由后述的控制部cu控制。当在来自驱动装置的动力的作用下而支承台旋转时,设置于该支承台之上的基片也能够旋转。
[0061]
光学传感器在基片旋转的期间,检测基片的边缘。光学传感器根据边缘的检测结果,来检测基片的缺口(或者,其他标记)的角度位置相对于基准角度位置的偏离量、和基片的中心位置相对于基准位置的偏离量。光学传感器将缺口的角度位置的偏离量和基片的中心位置的偏离量输出到后述的控制部cu。控制部cu基于缺口的角度位置的偏离量,计算用于将缺口的角度位置校正为基准角度位置的旋转支承台的旋转量。控制部cu控制驱动装置(未图示),以使旋转支承台以该旋转量旋转。由此,能够将缺口的角度位置校正为基准角度位置。此外,控制部cu基于基片的中心位置的偏离量控制从对准器an接收基片时的大气输送机器人tr3的叉形部件fk31的位置,以使得大气输送机器人tr3的叉形部件fk31上的规定位置与基片的中心位置一致。
[0062]
收纳器sr与大气输送模块lm的沿长度方向的侧面连接。但是,收纳器sr也可以与大气输送模块lm的沿宽度方向的侧面连接。此外,收纳器sr也可以设置于大气输送模块lm的内部。收纳器sr收纳输送对象物。
[0063]
在处理系统ps设置有控制部cu。控制部cu例如可以是计算机。控制部cu具有cpu(central processing unit:中央处理器)、ram(random access memory:随机存取存储器)、rom(read only memory:只读存储器)、辅助存储装置等。cpu基于保存在rom或者辅助存储装置中的程序进行动作,控制处理系统ps的各部。例如,控制部cu将动作指示输出到真空输送机器人tr1、tr2、大气输送机器人tr3等。动作指示包含输送输送对象物的叉形部件fk11、fk12、fk21、fk22、fk31与输送对象物的输送部位的位置对准的指示。
[0064]
[等离子体处理系统]
[0065]
参照图2,对能够作为处理模块pm1~pm12中所得任一者而采用的等离子体处理系统的一个例子进行说明。
[0066]
在一实施方式中,等离子体处理系统包含等离子体处理装置1和等离子体处理控制部2。等离子体处理装置1包含等离子体处理腔室10、基片支承部11和等离子体生成部12。等离子体处理腔室10具有等离子体处理空间。此外,等离子体处理腔室10具有:用于将至少一个处理气体供给到等离子体处理空间的至少一个气体供给口;和用于从等离子体处理空
间排出气体的至少一个气体排出口。气体供给口与后述的气体供给部20连接,气体排出口与后述的排气系统40连接。基片支承部11配置在等离子体处理空间内,具有用于支承基片的基片支承面。
[0067]
等离子体生成部12构成为能够从被供给到等离子体处理空间内的至少一个处理气体生成等离子体。在等离子体处理空间中形成的等离子体可以为电容耦合等离子体(ccp:capacitively coupled plasma)、电感耦合等离子体(icp:inductively coupled plasma)、ecr等离子体(electron-cyclotron-resonance plasma:电子回旋共振等离子体)、螺旋波激发等离子体(hwp:helicon wave plasma)或者表面波等离子体(swp:surface wave plasma)等。此外,也可以使用包含ac(alternating current:交流)等离子体生成部和dc(direct current:直流)等离子体生成部的各种类型的等离子体生成部。在一实施方式中,ac等离子体生成部中使用的ac信号(ac电功率)具有100khz~10ghz的范围内的频率。因此,ac信号包含rf(radio frequency:高频)信号和微波信号。在一实施方式中,rf信号具有200khz~150mhz的范围内的频率。
[0068]
等离子体处理控制部2处理使等离子体处理装置1执行在本发明中说明的各种工序的计算机可执行的命令。等离子体处理控制部2可构成为,能够控制等离子体处理装置1的各要素,以使得执行此处所说明的各种工序。在一实施方式中,也可以为,等离子体处理控制部2的一部分或者全部包含在等离子体处理装置1中。等离子体处理控制部2例如也可以包含计算机2a。计算机2a例如可以包含处理部(cpu:central processing unit,中央处理器)2a1、存储部2a2和通信接口2a3。处理部2a1可构成为,能够基于保存在存储部2a2中的程序来进行各种控制动作。存储部2a2可以包含ram(random access memory:随机存取存储器)、rom(read only memory:只读存储器)、hdd(hard disk drive:硬盘驱动器)、ssd(solid state drive:固态驱动器)或者它们的组合。通信接口2a3可以经由lan(local area network:局域网)等通信线路与等离子体处理装置1之间进行通信。
[0069]
参照图3,以下,说明作为等离子体处理装置1的一个例子的、电容耦合等离子体处理装置的结构例。
[0070]
电容耦合等离子体处理装置1包含等离子体处理腔室10、气体供给部20、电源30和排气系统40。此外,等离子体处理装置1包含基片支承部11和气体导入部。气体导入部构成为能够将至少一个处理气体导入等离子体处理腔室10内。气体导入部包含喷淋头13。基片支承部11配置在等离子体处理腔室10内。喷淋头13配置在基片支承部11的上方。在一实施方式中,喷淋头13构成等离子体处理腔室10的顶部(ceiling)的至少一部分。等离子体处理腔室10具有由喷淋头13、等离子体处理腔室10的侧壁10a和基片支承部11规定出的等离子体处理空间10s。侧壁10a接地。喷淋头13和基片支承部11与等离子体处理腔室10壳体电绝缘。
[0071]
基片支承部11包含主体部111和环状组件112。主体部111具有用于支承基片(晶片)w的中央区域(基片支承面)111a和用于支承环状组件112的环状区域(环状支承面)111b。主体部111的环状区域111b在俯视时包围主体部111的中央区域111a。基片w配置在主体部111的中央区域111a上,环状组件112以包围主体部111的中央区域111a上的基片w的方式配置在主体部111的环状区域111b上。在一实施方式中,主体部111包含基体和静电吸盘。基体包含导电性部件。基体的导电性部件作为下部电极发挥功能。静电吸盘配置在基体之
上。静电吸盘的上表面具有基片支承面111a。环状组件112包含一个或多个环状部件。一个或多个环状部件中的至少一者为边缘环。此外,虽然省略图示,但基片支承部11也可以包含温度调节模块,该温度调节模块构成为能够将静电吸盘、环状组件112和基片中的至少一者调节为目标温度。温度调节模块也可以包含加热器、传热介质、流路或者它们的组合。如卤水、气体这样的传热流体能够在流路中流动。此外,基片支承部11也可以包含传热气体供给部,该传热气体供给部构成为能够对基片w的背面与基片支承面111a之间供给传热气体。
[0072]
喷淋头13构成为能够将来自气体供给部20的至少一个处理气体导入等离子体处理空间10s内。喷淋头13具有至少一个气体供给口13a、至少一个气体扩散室13b和多个气体导入口13c。被供给到气体供给口13a的处理气体,通过气体扩散室13b从多个气体导入口13c被导入等离子体处理空间10s内。此外,喷淋头13包含导电性部件。喷淋头13的导电性部件作为上部电极发挥功能。此外,气体导入部除了喷淋头13之外,还可以包含安装在形成于侧壁10a的一个或多个开口部的一个或多个侧部气体注入部(sgi:side gas injector)。
[0073]
气体供给部20也可以包含至少一个气体源21和至少一个流量控制器22。在一实施方式中,气体供给部20构成为能够将至少一个处理气体从与之分别对应的气体源21经由与之分别对应的流量控制器22供给到喷淋头13。各流量控制器22例如也可以包含质量流量控制器或者压力控制式的流量控制器。而且,气体供给部20也可以包含对至少一个处理气体的流量进行调制或者使其脉冲化的至少一个流量调制器。
[0074]
电源30包含经由至少一个阻抗匹配电路与等离子体处理腔室10耦合的rf电源31。rf电源31构成为能够将如生成源rf信号和偏置rf信号这样的至少一个rf信号(rf电功率)供给到基片支承部11的导电性部件和/或喷淋头13的导电性部件。由此,从被供给到等离子体处理空间10s的至少一个处理气体形成等离子体。因此,rf电源31能够作为等离子体生成部12的至少一部分发挥功能。此外,通过将偏置rf信号供给到基片支承部11的导电性部,能够在基片w产生偏置电位,将所形成的等离子体中的离子成分吸引到基片w。
[0075]
在一实施方式中,rf电源31包含第一rf生成部31a和第二rf生成部31b。第一rf生成部31a经由至少一个阻抗匹配电路与基片支承部11的导电性部件和/或喷淋头13的导电性部件耦合,构成为能够生成等离子体生成用的生成源rf信号(生成源rf电功率)。在一实施方式中,生成源rf信号具有13mhz~150mhz的范围内的频率。在一实施方式中,第一rf生成部31a也可以构成为能够生成具有不同频率的多个生成源rf信号。所生成的一个或多个生成源rf信号被供给到基片支承部11的导电性部件和/或喷淋头13的导电性部件。第二rf生成部31b经由至少一个阻抗匹配电路与基片支承部11的导电性部件耦合,构成为能够生成偏置rf信号(偏置rf电功率)。在一实施方式中,偏置rf信号具有比生成源rf信号低的频率。在一实施方式中,偏置rf信号具有400khz~13.56mhz的范围内的频率。在一实施方式中,第二rf生成部31b也可以构成为能够生成具有不同频率的多个偏置rf信号。所生成的一个或多个偏置rf信号被供给到基片支承部11的导电性部件。此外,各种实施方式中,也可以将生成源rf信号和偏置rf信号中的至少一者脉冲化。
[0076]
另外,电源30也可以包含与等离子体处理腔室10耦合的dc电源32。dc电源32包含第一dc生成部32a和第二dc生成部32b。在一实施方式中,第一dc生成部32a与基片支承部11的导电性部件连接,构成为能够生成第一dc信号。所生成的第一dc信号被施加到基片支承部11的导电性部件。在一实施方式中,第一dc信号也可以被施加到如静电吸盘内的电极的
这样的其他的电极。在一实施方式中,第二dc生成部32b与喷淋头13的导电性部件连接,构成为能够生成第二dc信号。所生成的第二dc信号被施加到喷淋头13的导电性部件。各种实施方式中,也可以将第一和第二dc信号脉冲华。此外,可以除了设置rf电源31之外还设置第一和第二dc生成部32a、32b,也可以代替第二rf生成部31b而设置第一dc生成部32a。
[0077]
排气系统40能够与设置于例如等离子体处理腔室10的底部的气体排出口10e连接。排气系统40也可以包含压力调节阀和真空泵。利用压力调节阀,调整等离子体处理空间10s内的压力。真空泵可以包含涡轮分子泵、干式泵或者它们的组合。
[0078]
[相对位置的计算方法]
[0079]
参照图4,对计算真空输送机器人tr1的叉形部件fk11与基片w的相对位置的方法的一个例子进行说明。此外,囧穿真空输送机器人tr1的叉形部件fk12和真空输送机器人tr2的叉形部件fk21、fk22与基片w的相对位置的方法也可以是同样的。
[0080]
图4是真空输送机器人tr1的叉形部件fk11与基片w的相对位置的说明图。图4的(a)是保持着基片w的叉形部件fk11的俯视图。图4的(b)是保持着基片w的叉形部件fk11的剖视图,表示由图4的(a)中的点划线4b-4b切断而得的剖面。
[0081]
叉形部件fk11具有俯视时呈大致u字的形状。叉形部件fk11包含多个衬垫pd、导体cd1等。多个衬垫pd与基片w的下表面而保持该基片w。当在叉形部件fk11的规定位置(例如中心位置)设置有基片w时,导体cd1设置于俯视时其中心与静电电容传感器cs的中心一致的位置。导体cd1例如为铝。
[0082]
基片w为圆板形状的传感器晶片。基片w包含位置检测传感器ps1~ps6、静电电容传感器cs等。
[0083]
位置检测传感器ps1~ps6例如在基片w的表面的外周缘部配置于同一圆周上。位置检测传感器ps1~ps6例如可以是构成为能够拍摄基片w的下方、侧方的摄像机。但是,位置检测传感器ps1~ps6的种类并不限定于此。
[0084]
静电电容传感器cs设置于基片w的规定位置。静电电容传感器cs检测与基片w在被保持于叉形部件fk11时与设置于叉形部件fk11的导体cd1的位置关系对应的静电电容,将检测值(检测结果)输出到控制部cu。
[0085]
参照图5,对计算大气输送机器人tr3的叉形部件fk31与基片w的相对位置的方法的一个例子进行说明。
[0086]
图5是大气输送机器人tr3的叉形部件fk31与基片w的相对位置的说明图。图5的(a)是保持着基片w的叉形部件fk31的俯视图。图5的(b)是保持着基片w的叉形部件fk31的剖视图,表示由图5的(a)中的点划线5b-5b切断而得的剖面。
[0087]
叉形部件fk31具有俯视时呈大致u字的形状。叉形部件fk31包含多个吸引孔v1、吸引通路v2、导体cd2等。叉形部件fk31利用多个吸引孔v1真空吸附基片w的下表面来进行保持。多个吸引孔v1经由吸引通路v2和排气管v3与排气装置v4连接。排气装置v4包含阀、调节器、真空泵等,一边调节压力一边对吸引通路v2和排气管v3内进行吸引。在排气管v3插设有吸附传感器v5。吸附传感器v5检测排气管v3内的压力(以下也称为“吸附压力“。),并输出到控制部cu。控制部cu基于由吸附传感器v5检测的吸附压力,计算叉形部件fk31的上表面与基片w的下表面接触时的高度位置。当在叉形部件fk31的规定位置(例如中心位置)设置有基片w时,导体cd2设置于俯视时其中心与静电电容传感器cs的中心一致的位置。导体cd2例
如为铝。
[0088]
基片w与图4的(a)和图4的(b)所示的基片w相同。即,基片w为圆板形状的传感器晶片。基片w包含位置检测传感器ps1~ps6、静电电容传感器cs等。
[0089]
静电电容传感器cs设置于基片w的规定位置。静电电容传感器cs检测与基片w被吸附保持于叉形部件fk31时与设置于叉形部件fk31的导体cd2的位置关系对应的静电电容,将检测值(检测结果)输出到控制部cu。
[0090]
静电电容传感器cs例如如图6所示,具有俯视时比导体cd1(cd2)大的圆形形状。但是,静电电容传感器cs也可以具有俯视时与导体cd1(cd2)相同大小的圆形形状,还可以具有俯视时比导体cd1(cd2)小的圆形形状。此外,静电电容传感器cs也可以具有与圆形形状不同的形状,例如矩形形状等多边形状。
[0091]
静电电容传感器cs例如如图7所示,也可以包含俯视时配置于正三角形的顶点的3个静电电容传感器cs1~cs3。3个静电电容传感器cs1~cs3分别具有俯视时比导体cd1(cd2)小的圆形形状。但是,多个静电电容传感器各自也可以具有与圆形形状不同的形状,例如矩形形状等多边形状。此外,静电电容传感器cs可以包含2个静电电容传感器,也可以包含4个以上的静电电容传感器。
[0092]
另外,在图4和图5的例子中,说明了静电电容传感器cs设置于基片w的情况,但并不限定于此。例如,静电电容传感器cs也可以设置于叉形部件fk11,fk31。
[0093]
[位置对准方法]
[0094]
对于实施方式的位置对准方法,以在前述的处理系统ps中实施的情况为例进行说明。
[0095]
实施方式的位置对准方法例如在处理系统ps启动时实施。此外,实施方式的位置对准方法例如在真空输送机器人tr1的叉形部件fk11、fk12、真空输送机器人tr2的叉形部件fk21、fk22、大气输送机器人tr3的叉形部件fk31进行更换时实施。此外,实施方式的位置对准方法例如在更换处理模块pm1~pm12内的零件(例如静电吸盘、边缘环)时实施。但是,实施方式的位置对准方法的实施时机并不限定于例示的时机。
[0096]
另外,在实施方式的位置对准方法之前,优选实施粗略示教。粗略示教是对于输送机器人的叉形部件,相对于输送对象物的输送部位暂时决定输送位置坐标的示教。粗略示教是为了使叉形部件所保持的输送对象物不与处理系统内的部件等接触而实施的示教,以较低的精度暂时决定输送位置坐标。此外,当处理系统的组装误差小等情况下,也可以根据处理系统的设计数值计算输送位置坐标,省略粗略示教。
[0097]
以下,首先对大气输送机器人tr3的位置对准方法进行说明,接着对真空输送机器人tr1、tr2的位置对准方法进行说明。
[0098]
(大气输送机器人的位置对准)
[0099]
参照图8,对大气输送机器人tr3的位置对准方法的一个例子进行说明。如图8所示,在大气输送机器人tr3的位置对准方法中,首先,在工序s10中,进行大气输送机器人tr3、对准器an与机器人端口lp1~lp4的位置对准。接着,在工序s20中,进行大气输送机器人tr3与收纳器sr的位置对准。接着,在工序s30中,进行大气输送机器人tr3与装载锁定模块ll1、ll2的位置对准。但是,工序s20与工序s30的顺序可以颠倒。
[0100]
参照图9,对大气输送机器人tr3、对准器an与机器人端口lp1的位置对准(工序
s10)的一个例子进行说明。此外,在工序s10开始时,使得在机器人端口lp1载置有收纳了传感器晶片的容器c。
[0101]
在步骤s11中,控制部cu控制大气输送机器人tr3,以利用叉形部件fk31从载置于机器人端口lp1的容器c内获取传感器晶片。此时,控制部cu基于叉形部件fk31的吸附传感器v5的检测值,计算叉形部件fk31的上表面与传感器晶片的下表面接触时的高度位置。此外,控制部cu基于计算出的高度位置对z轴的教示(示教)位置进行校正。
[0102]
在步骤s12中,控制部cu控制大气输送机器人tr3,以将叉形部件fk31获取到的传感器晶片输送到对准器an。
[0103]
在步骤s13中,控制部cu控制对准器an,以检测传感器晶片的水平方向的位置。水平方向的位置包含缺口的角度位置、传感器晶片的中心位置等。
[0104]
在步骤s14中,控制部cu基于对准器an的检测结果,计算机器人端口lp1与对准器an之间的水平方向的位置偏离量。此外,控制部cu基于计算出的位置偏离量,对x轴的教示位置和y轴的教示位置进行校正。
[0105]
在步骤s15中,控制部cu控制大气输送机器人tr3,以在校正后的位置利用叉形部件fk31从对准器an获取传感器晶片。
[0106]
在步骤s16中,控制部cu计算叉形部件fk31与传感器晶片的相对位置。例如,控制部cu基于设置于传感器晶片的静电电容传感器cs的检测值,计算叉形部件fk31与传感器晶片的相对位置。但是,控制部cu也可以基于设置于传感器晶片的位置检测传感器ps1~ps6的检测值,计算叉形部件fk31与传感器晶片的相对位置。
[0107]
在步骤s17中,控制部cu判断计算出的叉形部件fk31与传感器晶片的相对位置是否在基准值内。在步骤s17中,当相对位置在基准值内时,控制部cu使处理进行到步骤s18。另一方面,在步骤s17中,当相对位置不在基准值内时,控制部cu进行教示位置的校正以使得相对位置在基准值内,使处理返回步骤s15。
[0108]
在步骤s18中,控制部cu控制大气输送机器人tr3,以将叉形部件fk31获取到的传感器晶片输送到规定的回收位置。规定的回收位置可以是载置于机器人端口lp1的容器c、收纳器sr等。在传感器晶片被回收后,控制部cu使处理结束。
[0109]
以上,对大气输送机器人tr3、对准器an与机器人端口lp1的位置对准的一个例子进行了说明,但对于机器人端口lp2~lp4利用与机器人端口lp1同样的方法也能够进行位置对准。
[0110]
参照图10,对大气输送机器人tr3与收纳器sr的位置对准(工序s20)的一个例子进行说明。此外,在工序s20开始时,使大气输送机器人tr3、对准器an与机器人端口lp1的位置对准(工序s10)完成。
[0111]
在步骤s21中,控制部cu控制大气输送机器人tr3,以利用叉形部件fk31在收纳器sr的规定位置(例如中心位置)设置传感器晶片。此时,控制部cu基于传感器晶片的位置检测传感器ps1~ps6的检测值控制大气输送机器人tr3,以将传感器晶片设置在收纳器sr的规定位置。
[0112]
在步骤s22中,控制部cu控制大气输送机器人tr3,以利用叉形部件fk31从收纳器sr获取传感器晶片。此时,控制部cu基于叉形部件fk31的吸附传感器v5的检测值,计算叉形部件fk31的上表面与传感器晶片的下表面接触时的高度位置。此外,控制部cu基于计算出
的高度位置,对z轴的教示位置进行校正。
[0113]
在步骤s23中,控制部cu控制大气输送机器人tr3,以利用叉形部件fk31将传感器晶片输送到对准器an。
[0114]
在步骤s24中,控制部cu控制对准器an,以检测传感器晶片的水平方向的位置。
[0115]
在步骤s25中,控制部cu基于对准器an的检测结果,计算收纳器sr与对准器an之间的水平方向的位置偏离量。此外,控制部cu基于计算出的位置偏离量,对x轴的教示位置和y轴的教示位置进行校正。
[0116]
在步骤s26中,控制部cu控制大气输送机器人tr3,以利用叉形部件fk31将传感器晶片输送到规定的回收位置。规定的回收位置可以为载置于机器人端口lp1的容器c、收纳器sr等。在传感器晶片被回收后,控制部cu使处理结束。
[0117]
参照图11,对大气输送机器人tr3与收纳器sr的位置对准(工序s20)的另一个例子进行说明。此外,在工序s20开始时,使大气输送机器人tr3、对准器an与机器人端口lp1的位置对准(工序s10)完成。
[0118]
在步骤s21a中,控制部cu控制大气输送机器人tr3,以利用叉形部件fk31在收纳器sr的规定位置(例如中心位置)设置传感器晶片。此外,控制部cu基于叉形部件fk31的吸附传感器v5的检测值,计算叉形部件fk31的上表面与传感器晶片的下表面接触时的高度位置。此外,控制部cu基于计算出的高度位置,对z轴的教示位置进行校正。
[0119]
在步骤s22a中,控制部cu计算收纳器sr与传感器晶片的相对位置。例如,控制部cu基于设置于传感器晶片的位置检测传感器ps1~ps6的检测值,计算收纳器sr与传感器晶片的相对位置。但是,控制部cu也可以基于设置于传感器晶片的静电电容传感器cs的检测值,计算收纳器sr与传感器晶片的相对位置。
[0120]
在步骤s23a中,控制部cu判断计算出的收纳器sr与传感器晶片的相对位置是否在基准值内。在步骤s23a中,当相对位置在基准值内时,控制部cu使处理进行到步骤s27a。另一方面,在步骤s23a中,当相对位置不在基准值内时,控制部cu进行教示位置的校正以使得相对位置在基准值内,使处理进行到步骤s24a。
[0121]
在步骤s24a中,控制部cu控制大气输送机器人tr3,以在校正后的位置利用叉形部件fk31从收纳器sr获取传感器晶片。
[0122]
在步骤s25a中,控制部cu控制大气输送机器人tr3,以将叉形部件fk31获取到的传感器晶片送回收纳器sr。
[0123]
在步骤s26a中,控制部cu计算收纳器sr与传感器晶片的相对位置。例如,控制部cu基于设置于传感器晶片的位置检测传感器ps1~ps6的检测值,计算收纳器sr与传感器晶片的相对位置。但是,控制部cu也可以基于设置于传感器晶片的静电电容传感器cs的检测值,计算收纳器sr与传感器晶片的相对位置。控制部cu在计算出相对位置后,使处理返回步骤s23a。
[0124]
在步骤s27a中,控制部cu控制大气输送机器人tr3,以利用叉形部件fk31将传感器晶片输送到规定的回收位置。规定的回收位置可以是载置于机器人端口lp1的容器c、收纳器sr等。在传感器晶片被回收后,控制部cu使处理结束。
[0125]
参照图12,对大气输送机器人tr3与装载锁定模块ll1的位置对准(工序s30)的一个例子进行说明。此外,在工序s30开始时,使大气输送机器人tr3、对准器an与机器人端口
lp1的位置对准(工序s10)完成。
[0126]
在步骤s31中,控制部cu控制大气输送机器人tr3,以利用叉形部件fk31在装载锁定模块ll1的规定位置(例如中心位置)设置传感器晶片。此时,控制部cu基于传感器晶片的位置检测传感器ps1~ps6的检测值控制大气输送机器人tr3,以将传感器晶片设置在装载锁定模块ll1的规定位置。
[0127]
在步骤s32中,控制部cu控制大气输送机器人tr3,以利用叉形部件fk31从装载锁定模块ll1获取传感器晶片。此时,控制部cu基于叉形部件fk31的吸附传感器v5的检测值,计算叉形部件fk31的上表面与传感器晶片的下表面接触时的高度位置。此外,控制部cu基于计算出的高度位置,对z轴的教示位置进行校正。
[0128]
在步骤s33中,控制部cu控制大气输送机器人tr3,以利用叉形部件fk31将传感器晶片输送到对准器an。
[0129]
在步骤s34中,控制部cu控制对准器an,以检测传感器晶片的水平方向的位置。
[0130]
在步骤s35中,控制部cu基于对准器an的检测结果,计算装载锁定模块ll1与对准器an之间的水平方向的位置偏离量。此外,控制部cu基于计算出的位置偏离量,对x轴的教示位置和y轴的教示位置进行校正。
[0131]
在步骤s36中,控制部cu控制大气输送机器人tr3,以利用叉形部件fk31将传感器晶片输送到规定的回收位置。规定的回收位置可以是载置于机器人端口lp1的容器c、收纳器sr等。在传感器晶片被回收后,控制部cu使处理结束。
[0132]
以上,对大气输送机器人tr3与装载锁定模块ll1的位置对准的一个例子进行了说明,对于装载锁定模块ll2利用与装载锁定模块ll1同样的方法也能够进行位置对准。
[0133]
参照图13,对大气输送机器人tr3与装载锁定模块ll1的位置对准(工序s20)的另一个例子进行说明。此外,在工序s30开始时,使大气输送机器人tr3、对准器an与机器人端口lp1的位置对准(工序s10)完成。
[0134]
在步骤s31a中,控制部cu控制大气输送机器人tr3,以利用叉形部件fk31在装载锁定模块ll1的规定位置(例如中心位置)设置传感器晶片。此外,控制部cu基于叉形部件fk31的吸附传感器v5的检测值,计算叉形部件fk31的上表面与传感器晶片的下表面接触时的高度位置。此外,控制部cu基于计算出的高度位置,对z轴的教示位置进行校正。
[0135]
在步骤s32a中,控制部cu计算装载锁定模块ll1与传感器晶片的相对位置。例如,控制部cu基于设置于传感器晶片的位置检测传感器ps1~ps6的检测值,计算装载锁定模块ll1与传感器晶片的相对位置。但是,控制部cu也可以基于设置于传感器晶片的静电电容传感器cs的检测值,计算装载锁定模块ll1与传感器晶片的相对位置。
[0136]
在步骤s33a中,控制部cu判断计算出的装载锁定模块ll1与传感器晶片的相对位置是否在基准值内。在步骤s33a中,当相对位置在基准值内时,控制部cu使处理进行到步骤s37a。另一方面,在步骤s33a中,当相对位置不在基准值内时,控制部cu进行教示位置的校正以使得相对位置在基准值内,使处理进行到步骤s34a。
[0137]
在步骤s34a中,控制部cu控制大气输送机器人tr3,以在校正后的位置利用叉形部件fk31从装载锁定模块ll1获取传感器晶片。
[0138]
在步骤s35a中,控制部cu控制大气输送机器人tr3,以将叉形部件fk31获取到的传感器晶片送回装载锁定模块ll1。
[0139]
在步骤s36a中,控制部cu计算装载锁定模块ll1与传感器晶片的相对位置。例如,控制部cu基于设置于传感器晶片的位置检测传感器ps1~ps6的检测值,计算装载锁定模块ll1与传感器晶片的相对位置。但是,控制部cu也可以基于设置于传感器晶片的静电电容传感器cs的检测值,计算装载锁定模块ll1与传感器晶片的相对位置。控制部cu在计算出相对位置后,使处理返回步骤s33a。
[0140]
在步骤s37a中,控制部cu控制大气输送机器人tr3,以利用叉形部件fk31将传感器晶片输送到规定位置。规定的回收位置可以是载置于机器人端口lp1的容器c、收纳器sr等。在传感器晶片被回收后,控制部cu使处理结束。
[0141]
以上,对大气输送机器人tr3与装载锁定模块ll1的位置对准的另一个例子进行了说明,但对于装载锁定模块ll2利用与装载锁定模块ll1同样的方法也能够进行位置对准。
[0142]
(真空输送机器人的位置对准)
[0143]
参照图14,对真空输送机器人tr1、tr2的位置对准方法的一个例子进行说明。如图14所示,在真空输送机器人tr1、tr2的位置对准方法中,首先,在工序s40中,进行真空输送机器人tr1、tr2与装载锁定模块ll1、ll2的位置对准。接着,在工序s50中,进行真空输送机器人tr1、tr2与处理模块pm1~pm12的位置对准。
[0144]
参照图15,对真空输送机器人tr1的叉形部件fk11与装载锁定模块ll1的位置对准(工序s40)的一个例子进行说明。此外,在工序s40开始时,使在装载锁定模块ll1的规定位置(例如中心位置)设置有传感器晶片。
[0145]
在步骤s41中,控制部cu控制真空输送机器人tr1,以利用叉形部件fk11获取设置于装载锁定模块ll1的规定位置(例如中心位置)的传感器晶片。
[0146]
在步骤s42中,控制部cu计算叉形部件fk11与传感器晶片的相对位置。例如,控制部cu基于设置于传感器晶片的静电电容传感器cs的检测值,计算叉形部件fk11与传感器晶片的相对位置。但是,控制部cu也可以基于设置于传感器晶片的位置检测传感器ps1~ps6的检测值,计算叉形部件fk11与传感器晶片的相对位置。
[0147]
在步骤s43中,控制部cu判断计算出的叉形部件fk11与传感器晶片的相对位置是否在基准值内。在步骤s43中,当相对位置在基准值内时,控制部cu使处理进行到步骤s47。另一方面,在步骤s43中,当相对位置不在基准值内时,控制部cu进行教示位置的校正以使得相对位置在基准值内,使处理进行到步骤s43。
[0148]
在步骤s44中,控制部cu控制真空输送机器人tr1,以利用叉形部件fk11将传感器晶片送回装载锁定模块ll1。
[0149]
在步骤s45中,控制部cu基于相对位置的检测结果,计算叉形部件fk11与装载锁定模块ll1之间的水平方向的位置偏离量。此外,控制部cu基于计算出的位置偏离量,对x轴的教示位置和y轴的教示位置进行校正。
[0150]
在步骤s46中,控制部cu控制真空输送机器人tr1,以在校正后的位置利用叉形部件fk11从装载锁定模块ll1获取传感器晶片。
[0151]
在步骤s47中,控制部cu控制真空输送机器人tr1,以利用叉形部件fk11将传感器晶片输送到规定的回收位置。规定的回收位置可以为装载锁定模块ll1等。在传感器晶片被回收后,控制部cu使处理结束。
[0152]
以上,对真空输送机器人tr1的叉形部件fk11与装载锁定模块ll1的位置对准的一
个例子进行了说明,但对于装载锁定模块ll2利用与装载锁定模块ll1同样的方法也能够进行位置对准。
[0153]
参照图16,对真空输送机器人tr1的叉形部件fk11与处理模块pm1的位置对准(工序s50)的一个例子进行说明。此外,在工序s50开始时,使在装载锁定模块ll1的规定位置(例如中心位置)设置有传感器晶片。
[0154]
在步骤s51中,控制部cu控制真空输送机器人tr1,以利用叉形部件fk11在处理模块pm1设置传感器晶片。
[0155]
在步骤s52中,控制部cu计算处理模块pm1内的零件(例如静电吸盘、边缘环)与传感器晶片的相对位置。例如,控制部cu基于设置于传感器晶片的位置检测传感器ps1~ps6的检测值,计算处理模块pm1内的零件与传感器晶片的相对位置。但是,控制部cu也可以基于设置于传感器晶片的静电电容传感器cs的检测值,计算处理模块pm1内的零件与传感器晶片的相对位置。
[0156]
在步骤s53中,控制部cu判断计算出的处理模块pm1与传感器晶片的相对位置是否在基准值内。在步骤s53中,当相对位置在基准值内时,控制部cu使处理进行到步骤s57。另一方面,在步骤s53中,当相对位置不在基准值内时,控制部cu进行教示位置的校正以使得相对位置在基准值内,使处理进行到步骤s54。
[0157]
在步骤s54中,控制部cu控制真空输送机器人tr1,以在校正后的位置利用叉形部件fk11从处理模块pm1获取传感器晶片。
[0158]
在步骤s55中,控制部cu控制真空输送机器人tr1,以将叉形部件fk11获取到的传感器晶片送回处理模块pm1。
[0159]
在步骤s56中,控制部cu计算处理模块pm1内的零件(例如静电吸盘、边缘环)与传感器晶片的相对位置。例如,控制部cu基于设置于传感器晶片的位置检测传感器ps1~ps6的检测值,计算处理模块pm1内的零件与传感器晶片的相对位置。但是,控制部cu也可以基于设置于传感器晶片的静电电容传感器cs的检测值,计算处理模块pm1内的零件与传感器晶片的相对位置。控制部cu在计算出相对位置后,使处理返回步骤s53。
[0160]
在步骤s57中,控制部cu控制真空输送机器人tr1,以利用叉形部件fk11将传感器晶片输送到规定的回收位置。规定的回收位置可以为装载锁定模块ll1等。在传感器晶片被回收后,控制部cu使处理结束。
[0161]
以上,对真空输送机器人tr1的叉形部件fk11与处理模块pm1的位置对准的一个例子进行了说明,但对于处理模块pm2~pm6利用与处理模块pm1同样的方法也能够进行位置对准。
[0162]
如以上所说明的那样,依照实施方式,静电电容传感器将叉形部件与基片的相对位置作为配置信息输出到控制部,控制部基于该配置信息来决定叉形部件相对于基片的教示位置。由此,能够自动地调整叉形部件与基片之间的位置对准。
[0163]
另外,使用图8~图16对实施方式的位置对准方法进行了例示,但位置对准方法的具体的方式不一定必须限定于这些流程。
[0164]
在上述的实施方中,对利用静电电容传感器作为检测叉形部件与输送对象物的相对位置的传感器的情况进行了说明,但该传感器的种类并不限定于此。例如,也可以代替静电电容传感器,而利用光学传感器、磁传感器等非接触式传感器、摄像机等。光学传感器可
以为led(light emitting diode:发光二极管)传感器。摄像机例如为ccd摄像机。
[0165]
通过使用摄像机,起到基片w、末端执行器的位置精度提高的效果和能够观察随时间变化的效果。此外,通过使用摄像机,能够观察等离子体处理腔室10的整个内部。摄像机可以设置在与静电电容传感器相同的位置,也可以设置在末端执行器的根部。摄像机可以设置在末端执行器的上表面和下表面这两者,也可以设置在任意一者。当使用摄像机时,也能够以下部电极(吸盘)的槽、孔为标记,对末端执行器进行位置对准。
[0166]
在叉形部件设置摄像机的情况,能够控制对该后一基片w的等离子体处理的条件(例如等离子体处理腔室10的内部压力、处理气体流量、rf信号的功率等),以使得在后一基片w的等离子体处理时所附着的沉积物不会剥离、飞散。
[0167]
具体而言,例如在从等离子体处理腔室10送出的前一基片w时,利用摄像机拍摄等离子体处理腔室10的壁面、基片支承部11的表面。然后,基于通过拍摄而得到的等离子体处理腔室10的内部的沉积物的附着状态和成为预先决定的基准的沉积物的附着状态的变化量使后一基片w的等离子体处理的条件最优化,在对后一基片w进行等离子体处理时抑制沉积物的剥离、飞散的发生。
[0168]
另外,作为上述的“成为基准的沉积物的附着状态”,可以使用例如送出前一基片w时的拍摄结果,也可以使用例如在设置等离子体处理腔室10等时任意决定的状态。
[0169]
另外,摄像机的拍摄面例如能够根据对基片w的等离子体处理的条件来适当决定,也可以从等离子体处理腔室10的内部的侧壁面、顶面或者基片支承部11的上表面、侧面等有选择地拍摄。例如在根据等离子体处理的条件而已知容易附着沉积物的面时,可以仅拍摄该容易附着沉积物的一面或者拍摄多个面。此时,在拍摄等离子体处理腔室10的顶面时,摄像机优选设置在不与保持在叉形部件上的基片w发生干扰的位置。
[0170]
另外,对叉形部件的摄像机的设置数量没有特别限定,可以设置多个摄像机,也可以构成为一个摄像机可拍摄等离子体处理腔室10内的多个面。
[0171]
另外,在以上的说明中,根据基准的相对于附着状态的变化量,使对后一基片w的等离子体处理条件变化,但例如在等离子体处理腔室10的内部中的沉积物的附着量多的情况下,也可以进行控制以使得在对后一基片w的等离子体处理之前进行干式清洁处理,即进行沉积物的除去处理。此外,在该情况下,也可以根据沉积物的附着量来进行干式清洁处理的条件(例如清洁气体的流量、清洁时间等)的调整。
[0172]
另外,在以上的说明中,对在从等离子体处理腔室10送出前一基片w时拍摄等离子体处理腔室10的内部的情况为例进行了说明,但以独立于基片w的送出的方式使叉形部件进入等离子体处理腔室10的内部,进行沉积物的拍摄。
[0173]
在上述的实施方中,对基片为半导体晶片的情况进行了说明,但本发明并不限定于此。例如,基片也可以是lcd(liquid crystal display:液晶显示器)、fpd(flat panel display:平板显示器)中使用的各种基片、cd基板、印刷基板等。
[0174]
《第二实施方式》
[0175]
[处理系统]
[0176]
参照图1,对实施方式的处理系统的一个例子进行说明。如图1所示,处理系统ps是能够对基片实施等离子体处理等的各种处理的系统。
[0177]
处理系统ps包括真空输送模块tm1、tm2、处理模块pm1~pm12、装载锁定模块ll1、
ll2、大气输送模块lm、对准器an、收纳器sr等。
[0178]
真空输送模块tm1、tm2分别具有俯视时呈大致四边形的形状。真空输送模块tm1在相对的2个侧面连接有处理模块pm1~pm6。真空输送模块tm1的其他相对的2个侧面中,在一个侧面连接有装载锁定模块ll1、ll2,在另一个侧面连接有用于与真空输送模块tm2连接的通道(未图示)。真空输送模块tm1的供装载锁定模块ll1、ll2连接的侧面,具有与2个装载锁定模块ll1、ll2相配合的角度。真空输送模块tm2在相对的2个侧面连接有处理模块pm7~pm12。真空输送模块tm2的其他相对的2个侧面中,在一个侧面连接有用于与真空输送模块tm1连接的通道(未图示)。真空输送模块tm1、tm2具有真空气氛的真空室,在内部分别配置有真空输送机器人tr1、tr2。
[0179]
真空输送机器人tr1、tr2构成为可转动、伸缩、升降的。真空输送机器人tr1、tr2基于后述的控制部cu输出的动作指示输送输送对象物。例如,真空输送机器人tr1利用分别配置于机械臂ar11、ar12的前端的末端执行器fk11、fk12保持输送对象物,在装载锁定模块ll1、ll2、处理模块pm1~pm6和通道(未图示)之间输送输送对象物。例如,真空输送机器人tr2利用分别配置于机械臂ar21、ar22的前端的末端执行器fk21、fk22保持输送对象物,在处理模块pm7~pm12和通道(未图示)之间输送输送对象物。此外,末端执行器也称为叉形部件、拾取器。
[0180]
输送对象物包含基片和消耗部件。基片例如为半导体晶片、传感器晶片。消耗部件为可更换地安装于处理模块pm1~pm12内的部件,是由于在处理模块pm1~pm12内进行等离子体处理等的各种处理而消耗的部件。消耗部件例如包含构成后述的环状组件112、喷淋头13的部件。
[0181]
处理模块pm1~pm12具有处理室,具有配置于内部的工作台(载置台)。处理模块pm1~pm12在工作台设置了基片之后,将内部减压而导入处理气体,施加rf电功率而生成等离子体,利用等离子体对基片实施等离子体处理。真空输送模块tm1、tm2和处理模块pm1~pm12由可开闭的闸门(gate valve)g1分隔。
[0182]
装载锁定模块ll1、ll2配置于真空输送模块tm1与大气输送模块lm之间。装载锁定模块ll1、ll2具有能够将内部切换为真空、大气压的内压可变室。装载锁定模块ll1、ll2具有配置于内部的工作台。装载锁定模块ll1、ll2将基片从大气输送模块lm送入真空输送模块tm1时,将内部维持为大气压而从大气输送模块lm接收基片,将内部减压而向真空输送模块tm1送入基片。装载锁定模块ll1、ll2在将基片从真空输送模块tm1向大气输送模块lm送出时,将内部维持为真空而从真空输送模块tm1接收基片,将内部升压至大气压而向大气输送模块lm送入基片。装载锁定模块ll1、ll2和真空输送模块tm1由可开闭的闸门g2分隔。装载锁定模块ll1、ll2和大气输送模块lm由可开闭的闸门g3分隔。
[0183]
大气输送模块lm与真空输送模块tm1相对地配置。大气输送模块lm例如可以是efem(equipment front end module:设备前端模块)。大气输送模块lm为长方体状,具有ffu(fan filter unit:风机过滤器),是被保持为大气压气氛的大气输送室。在大气输送模块lm的沿长度方向的一个侧面,连接有2个装载锁定模块ll1、ll2。在大气输送模块lm的沿长度方向的另一个侧面,连接有机器人端口lp1~lp4。在机器人端口lp1~lp4,能够载置收纳多个(例如25个)基片的容器c。容器c例如可以是foup(front-opening unified pod:前开式晶片传送盒)。在大气输送模块lm内,配置有输送输送对象物的大气输送机器人tr3。
[0184]
大气输送机器人tr3构成为能够沿大气输送模块lm的长度方向移动,并且构成能够转动、伸缩、升降。大气输送机器人tr3基于后述的控制部cu输出的动作指示来输送输送对象物。例如,大气输送机器人tr3利用配置于机械臂ar31的前端的末端执行器fk31保持输送对象物,在机器人端口lp1~lp4、装载锁定模块ll1、ll2、对准器an和收纳器sr之间输送输送对象物。
[0185]
对准器an连接于大气输送模块lm的沿宽度方向的一个侧面。不过,对准器an也可以与大气输送模块lm的沿长度方向的侧面连接。此外,对准器an也可以设置于大气输送模块lm的内部。对准器an具有支承台、光学传感器(均未图示)等。此处所说的对准器,是指检测输送对象物的位置的装置。
[0186]
支承台是能够以在铅垂方向上延伸的轴线为中心旋转的台,构成为能够在其上支承基片。支承台在驱动装置(未图示)的作用下旋转。驱动装置由后述的控制部cu控制。当在来自驱动装置的动力的作用下而支承台旋转时,设置于该支承台之上的基片也能够旋转。
[0187]
光学传感器在基片旋转的期间,检测基片的边缘。光学传感器根据边缘的检测结果,来检测基片的缺口(或者,其他标记)的角度位置相对于基准角度位置的偏离量、和基片的中心位置相对于基准位置的偏离量。光学传感器将缺口的角度位置的偏离量和基片的中心位置的偏离量输出到后述的控制部cu。控制部cu基于缺口的角度位置的偏离量,计算用于将缺口的角度位置校正为基准角度位置的旋转支承台的旋转量。控制部cu控制驱动装置(未图示),以使旋转支承台以该旋转量旋转。由此,能够将缺口的角度位置校正为基准角度位置。此外,控制部cu基于基片的中心位置的偏离量控制从对准器an接收基片时的大气输送机器人tr3的末端执行器fk31的位置,以使得大气输送机器人tr3的末端执行器fk31上的规定位置与基片的中心位置一致。
[0188]
收纳器sr与大气输送模块lm的沿长度方向的侧面连接。但是,收纳器sr也可以与大气输送模块lm的沿宽度方向的侧面连接。此外,收纳器sr也可以设置于大气输送模块lm的内部。收纳器sr收纳输送对象物。
[0189]
在处理系统ps设置有控制部cu。控制部cu例如可以是计算机。控制部cu具有cpu(central processing unit:中央处理器)、ram(random access memory:随机存取存储器)、rom(read only memory:只读存储器)、辅助存储装置等。cpu基于保存在rom或者辅助存储装置中的程序进行动作,控制处理系统ps的各部。例如,控制部cu将动作指示输出到真空输送机器人tr1、tr2、大气输送机器人tr3等。动作指示包含输送输送对象物的末端执行器fk11、fk12、fk21、fk22、fk31与输送对象物的输送部位的位置对准的指示。
[0190]
[等离子体处理系统]
[0191]
参照图2,对能够作为处理模块pm1~pm12中所得任一者而采用的等离子体处理系统的一个例子进行说明。
[0192]
在一实施方式中,等离子体处理系统包含等离子体处理装置1和等离子体处理控制部2。等离子体处理装置1包含等离子体处理腔室10、基片支承部11和等离子体生成部12。等离子体处理腔室10具有等离子体处理空间。此外,等离子体处理腔室10具有:用于将至少一个处理气体供给到等离子体处理空间的至少一个气体供给口;和用于从等离子体处理空间排出气体的至少一个气体排出口。气体供给口与后述的气体供给部20连接,气体排出口与后述的排气系统40连接。基片支承部11配置在等离子体处理空间内,具有用于支承基片
的基片支承面。
[0193]
等离子体生成部12构成为能够从被供给到等离子体处理空间内的至少一个处理气体生成等离子体。在等离子体处理空间中形成的等离子体可以为电容耦合等离子体(ccp:capacitively coupled plasma)、电感耦合等离子体(icp:inductively coupled plasma)、ecr等离子体(electron-cyclotron-resonance plasma:电子回旋共振等离子体)、螺旋波激发等离子体(hwp:helicon wave plasma)或者表面波等离子体(swp:surface wave plasma)等。此外,也可以使用包含ac(alternating current:交流)等离子体生成部和dc(direct current:直流)等离子体生成部的各种类型的等离子体生成部。在一实施方式中,ac等离子体生成部中使用的ac信号(ac电功率)具有100khz~10ghz的范围内的频率。因此,ac信号包含rf(radio frequency:高频)信号和微波信号。在一实施方式中,rf信号具有200khz~150mhz的范围内的频率。
[0194]
等离子体处理控制部2处理使等离子体处理装置1执行在本发明中说明的各种工序的计算机可执行的命令。等离子体处理控制部2可构成为,能够控制等离子体处理装置1的各要素,以使得执行此处所说明的各种工序。在一实施方式中,也可以为,等离子体处理控制部2的一部分或者全部包含在等离子体处理装置1中。等离子体处理控制部2例如也可以包含计算机2a。计算机2a例如可以包含处理部(cpu:central processing unit,中央处理器)2a1、存储部2a2和通信接口2a3。处理部2a1可构成为,能够基于保存在存储部2a2中的程序来进行各种控制动作。存储部2a2可以包含ram(random access memory:随机存取存储器)、rom(read only memory:只读存储器)、hdd(hard disk drive:硬盘驱动器)、ssd(solid state drive:固态驱动器)或者它们的组合。通信接口2a3可以经由lan(local area network:局域网)等通信线路与等离子体处理装置1之间进行通信。
[0195]
参照图3,以下,说明作为等离子体处理装置1的一个例子的、电容耦合等离子体处理装置的结构例。
[0196]
电容耦合等离子体处理装置1包含等离子体处理腔室10、气体供给部20、电源30和排气系统40。此外,等离子体处理装置1包含基片支承部11和气体导入部。气体导入部构成为能够将至少一个处理气体导入等离子体处理腔室10内。气体导入部包含喷淋头13。基片支承部11配置在等离子体处理腔室10内。喷淋头13配置在基片支承部11的上方。在一实施方式中,喷淋头13构成等离子体处理腔室10的顶部(ceiling)的至少一部分。等离子体处理腔室10具有由喷淋头13、等离子体处理腔室10的侧壁10a和基片支承部11规定出的等离子体处理空间10s。侧壁10a接地。喷淋头13和基片支承部11与等离子体处理腔室10壳体电绝缘。
[0197]
基片支承部11包含主体部111和环状组件112。主体部111具有用于支承基片(晶片)w的中央区域(基片支承面)111a和用于支承环状组件112的环状区域(环状支承面)111b。主体部111的环状区域111b在俯视时包围主体部111的中央区域111a。基片w配置在主体部111的中央区域111a上,环状组件112以包围主体部111的中央区域111a上的基片w的方式配置在主体部111的环状区域111b上。在一实施方式中,主体部111包含基体和静电吸盘。基体包含导电性部件。基体的导电性部件作为下部电极发挥功能。静电吸盘配置在基体之上。静电吸盘的上表面具有基片支承面111a。环状组件112包含一个或多个环状部件。一个或多个环状部件中的至少一者为边缘环。此外,虽然省略图示,但基片支承部11也可以包含
温度调节模块,该温度调节模块构成为能够将静电吸盘、环状组件112和基片中的至少一者调节为目标温度。温度调节模块也可以包含加热器、传热介质、流路或者它们的组合。如卤水、气体这样的传热流体能够在流路中流动。此外,基片支承部11也可以包含传热气体供给部,该传热气体供给部构成为能够对基片w的背面与基片支承面111a之间供给传热气体。
[0198]
喷淋头13构成为能够将来自气体供给部20的至少一个处理气体导入等离子体处理空间10s内。喷淋头13具有至少一个气体供给口13a、至少一个气体扩散室13b和多个气体导入口13c。被供给到气体供给口13a的处理气体,通过气体扩散室13b从多个气体导入口13c被导入等离子体处理空间10s内。此外,喷淋头13包含导电性部件。喷淋头13的导电性部件作为上部电极发挥功能。此外,气体导入部除了喷淋头13之外,还可以包含安装在形成于侧壁10a的一个或多个开口部的一个或多个侧部气体注入部(sgi:side gas injector)。
[0199]
气体供给部20也可以包含至少一个气体源21和至少一个流量控制器22。在一实施方式中,气体供给部20构成为能够将至少一个处理气体从与之分别对应的气体源21经由与之分别对应的流量控制器22供给到喷淋头13。各流量控制器22例如也可以包含质量流量控制器或者压力控制式的流量控制器。而且,气体供给部20也可以包含对至少一个处理气体的流量进行调制或者使其脉冲化的至少一个流量调制器。
[0200]
电源30包含经由至少一个阻抗匹配电路与等离子体处理腔室10耦合的rf电源31。rf电源31构成为能够将如生成源rf信号和偏置rf信号这样的至少一个rf信号(rf电功率)供给到基片支承部11的导电性部件和/或喷淋头13的导电性部件。由此,从被供给到等离子体处理空间10s的至少一个处理气体形成等离子体。因此,rf电源31能够作为等离子体生成部12的至少一部分发挥功能。此外,通过将偏置rf信号供给到基片支承部11的导电性部,能够在基片w产生偏置电位,将所形成的等离子体中的离子成分吸引到基片w。
[0201]
在一实施方式中,rf电源31包含第一rf生成部31a和第二rf生成部31b。第一rf生成部31a经由至少一个阻抗匹配电路与基片支承部11的导电性部件和/或喷淋头13的导电性部件耦合,构成为能够生成等离子体生成用的生成源rf信号(生成源rf电功率)。在一实施方式中,生成源rf信号具有13mhz~150mhz的范围内的频率。在一实施方式中,第一rf生成部31a也可以构成为能够生成具有不同频率的多个生成源rf信号。所生成的一个或多个生成源rf信号被供给到基片支承部11的导电性部件和/或喷淋头13的导电性部件。第二rf生成部31b经由至少一个阻抗匹配电路与基片支承部11的导电性部件耦合,构成为能够生成偏置rf信号(偏置rf电功率)。在一实施方式中,偏置rf信号具有比生成源rf信号低的频率。在一实施方式中,偏置rf信号具有400khz~13.56mhz的范围内的频率。在一实施方式中,第二rf生成部31b也可以构成为能够生成具有不同频率的多个偏置rf信号。所生成的一个或多个偏置rf信号被供给到基片支承部11的导电性部件。此外,各种实施方式中,也可以将生成源rf信号和偏置rf信号中的至少一者脉冲化。
[0202]
另外,电源30也可以包含与等离子体处理腔室10耦合的dc电源32。dc电源32包含第一dc生成部32a和第二dc生成部32b。在一实施方式中,第一dc生成部32a与基片支承部11的导电性部件连接,构成为能够生成第一dc信号。所生成的第一dc信号被施加到基片支承部11的导电性部件。在一实施方式中,第一dc信号也可以被施加到如静电吸盘内的电极的这样的其他的电极。在一实施方式中,第二dc生成部32b与喷淋头13的导电性部件连接,构成为能够生成第二dc信号。所生成的第二dc信号被施加到喷淋头13的导电性部件。各种实
施方式中,也可以将第一和第二dc信号脉冲华。此外,可以除了设置rf电源31之外还设置第一和第二dc生成部32a、32b,也可以代替第二rf生成部31b而设置第一dc生成部32a。
[0203]
排气系统40能够与设置于例如等离子体处理腔室10的底部的气体排出口10e连接。排气系统40也可以包含压力调节阀和真空泵。利用压力调节阀,调整等离子体处理空间10s内的压力。真空泵可以包含涡轮分子泵、干式泵或者它们的组合。
[0204]
(实施方式的第一结构例)
[0205]
对实施方式的第一结构例的输送装置170的末端执行器100进行说明。图17是实施方式的第一结构例的输送装置170的末端执行器100的俯视图。
[0206]
另外,在图中,为了方便说明而有时设定了xyz正交坐标系。关于与附图的纸面垂直的坐标轴,在坐标轴的圆圈之中叉号标记表示相对于纸面向里的方向为正,在圆圈之中黑点标记表示相对于纸面的跟前侧为正。但是,该坐标系是为了说明而规定的,并不限定末端执行器等的姿态。
[0207]
另外,在本发明中,只要没有特别说明,就将x轴和y轴作为与末端执行器的载置面平行的方向的轴。y轴为末端执行器的前端部延伸的方向的轴。x轴为与y轴垂直的轴。z轴为与该x轴、y轴垂直的方向的轴。此外,有时将z轴方向称为上下方向。
[0208]
输送装置170例如表示真空输送机器人tr1、真空输送机器人tr2和大气输送机器人tr3中的至少任一者。输送装置170输送基片w和设置在等离子体处理装置1(基片处理装置)内的消耗零件。
[0209]
输送装置170包括末端执行器100、机械臂160和控制装置150。
[0210]
末端执行器100例如表示末端执行器fk11、末端执行器fk12、末端执行器fk22和末端执行器fk31中的至少任一者。机械臂160例如为与末端执行器100对应的机械臂ar11、ar12、ar21、ar22、ar31中的任一者。末端执行器100在大气压气氛下和真空气氛下中的至少一者,输送输送对象物。
[0211]
控制装置150控制机械臂160。此外,控制装置150与后述的静电电容传感器121、静电电容传感器122和静电电容传感器123分别连接。控制装置150基于静电电容传感器121、静电电容传感器122和静电电容传感器123各自测量出的结果,测量基片w与末端执行器100的位置关系。然后,控制装置150基于测量出的基片w与末端执行器100的位置关系,在基片w的位置偏离于所希望的位置的情况,对位置偏离进行校正。
[0212]
末端执行器100载置基片和要设置在等离子体处理装置1的消耗零件。要设置在等离子体处理装置1的消耗零件例如为环状组件112的环状部件。
[0213]
末端执行器100具有俯视时呈大致u字的形状。末端执行器100具有相对于通过x轴方向的中心的中心轴ax在俯视时对称的形状。
[0214]
末端执行器100具有基部101、前端部102和前端部103。前端部102和前端部103分别从基部101在+y轴方向上延伸地设置。前端部102和前端部103各自为在x轴方向上较短、在y轴方向上较长的俯视时呈大致长方形的形状。前端部102与前端部103在+x轴方向上隔开间隔地设置。末端执行器100例如由陶瓷形成。
[0215]
末端执行器100具有载置基片和消耗零件中的任一者的载置面100s。末端执行器100在载置面100s具有静电电容传感器121、静电电容传感器122和静电电容传感器123、以及保护基片w不与载置面100s接触的多个衬垫140。
[0216]
静电电容传感器121、静电电容传感器122和静电电容传感器123各自具有俯视时呈大致圆形形状的电极。静电电容传感器121、静电电容传感器122和静电电容传感器123分别测量各自的电极与载置在载置面100s的基片w之间的静电电容。即,静电电容传感器121、静电电容传感器122和静电电容传感器123分别测量各自的电极与基片w的俯视时的重叠。
[0217]
静电电容传感器121设置在基部101的x轴方向的中心。即,静电电容传感器121设置在中心轴ax上。静电电容传感器122设置在前端部102的y轴方向的+y侧的前端。静电电容传感器123设置在前端部103的y轴方向的+y侧的前端。
[0218]
对静电电容传感器121、静电电容传感器122和静电电容传感器123各自的位置进行说明。图18是说明实施方式的第一结构例的输送装置170的末端执行器100与基片w的相对位置的图。此外,图18表示基片w相对于末端执行器100载置于没有位置偏离的基准位置的状态。
[0219]
关于静电电容传感器121、静电电容传感器122和静电电容传感器123各自,在基片w载置于基准位置的情况下,静电电容传感器121、静电电容传感器122和静电电容传感器123各自的电极设置在从上表面观察时被基片w大致覆盖一半的位置。
[0220]
静电电容传感器121、静电电容传感器122和静电电容传感器123各自与控制装置150连接。控制装置150在接收基片w时,根据由静电电容传感器121、静电电容传感器122和静电电容传感器123分别测量出的静电电容,计算基片w相对于末端执行器100的载置基片的基准位置的位置偏离量。例如,控制装置150求取基片w的中心位置。然后,根据该中心位置相对于基准位置的偏离量计算基片w的位置偏离量。此外,静电电容传感器121、静电电容传感器122和静电电容传感器123也可以在输送中对基片w进行输送中计测。
[0221]
当基片w处于基准位置时,静电电容传感器121、静电电容传感器122和静电电容传感器123各自所检测的静电电容彼此相等。另一方面,当基片w偏离于基准位置时,位于位置发生偏离的方向的静电电容传感器所检测的静电电容较大。因此,根据静电电容传感器121、静电电容传感器122和静电电容传感器123各自所检测的静电电容,求取基片w的中心位置。
[0222]
控制装置150在计算出的位置偏离量比所希望的范围大时,即,基片w偏离于所希望的位置时,对基片w的位置偏离进行校正,再次载置基片w。
[0223]
另外,作为静电电容传感器的数量,不限于3个,例如,也可以具有4个以上。即,末端执行器100可以具有在至少2处以上设置的静电电容传感器。此外,静电电容传感器也可以设置在末端执行器100的同一圆周上的至少3处以上。
[0224]
另外,作为末端执行器100的输送对象物,不限于基片w。例如,也可以将环状组件112的环状部件、上部电极(例如,喷淋头13)作为输送对象物。图19是说明实施方式的第一结构例的输送装置170的末端执行器100与环状部件rng的相对位置的图。
[0225]
环状组件112的环状部件rng的内径与基片w的外形大致相等。因此,如图19所示,末端执行器100能够测量环状部件rng的位置偏离。
[0226]
[作用和效果]
[0227]
利用实施方式的第一结构例的输送装置170的末端执行器100,能够检测基片w相对于末端执行器100的位置偏离。检测基片w相对于末端执行器100的位置偏离,对基片w的位置进行校正,由此能够提高输送基片w时其相对于末端执行器100的位置精度。通过提高
基片w相对于末端执行器100的位置精度,使输送精度提高,能够提高输送装置的性能。
[0228]
另外,利用实施方式的第一结构例的输送装置170的末端执行器100,能够实时地对基片w的搭载位置进行校正。因此,能够提高输送装置的可靠性。
[0229]
而且,利用实施方式的第一结构例的输送装置170的末端执行器100,在处理多个基片w时,对各个基片w,测量位置偏离,能够对搭载位置进行校正。因此,能够提高输送装置的性能。
[0230]
而且,利用实施方式的第一结构例的输送装置170的末端执行器100,能够对位置偏离进行校正,因此不需要输送装置的高精度的示教,能够实现示教的自动化。因此,能够节省人力。此外,能够提高生产性。
[0231]
另外,利用实施方式的第一结构例的输送装置170的末端执行器100,能够对位置偏离进行校正,因此能够应用反复输送性能低的输送装置。因此,能够降低输送装置的成本。
[0232]
而且,利用实施方式的第一结构例的末端执行器100,能够对位置偏离进行校正,因此能够跟踪对象的温度变化和由消耗引起的形状的变化。
[0233]
例如,虽然使用传感器晶片等,能够测量环状组件112的环状部件的中心位置,但是当末端执行器与基片w的位置偏离于基准位置时,也不能将基片w载置在环状部件的中心位置。依照实施方式的第一结构例的末端执行器100,能够对基片w相对于末端执行器100的位置偏离进行校正,因此能够将基片w载置在环状组件112的环状部件的中心位置。
[0234]
另外,即使使用传感器晶片等,使输送机器人进行示教,由于环境的变化(例如,温度)或者传感器晶片与实际输送的基片w的差异等,在运送基片w时,不限于能够以与进行示教时相同精度来运送基片w。依照实施方式的第一结构例的末端执行器100,能够对基片w相对于末端执行器100的位置偏离进行校正,因此能够以高位置精度来输送基片w。
[0235]
(实施方式的第二结构例)
[0236]
下面,对实施方式的第二结构例的输送装置270的末端执行器200进行说明。图20是实施方式的第二结构例的输送装置270的末端执行器200的俯视图。末端执行器200不具有实施方式的第一结构例的输送装置170的末端执行器100的静电电容传感器121、静电电容传感器122和静电电容传感器123,而具有光学传感器222和光学传感器223。
[0237]
输送装置270包括末端执行器200、机械臂160和控制装置250。
[0238]
光学传感器222和光学传感器223各自以光学的方式检测在光学传感器222和光学传感器223各自的上侧是否存在基片w。光学传感器222和光学传感器223各自与控制装置250连接。
[0239]
例如,光学传感器222和光学传感器223各自为图像传感器。作为图像传感器的光学传感器222和光学传感器223各自拍摄光学传感器222和光学传感器223各自的上侧。然后,控制装置250根据拍摄到的图像,判断在光学传感器222和光学传感器223各自的上侧是否存在基片w。
[0240]
另外,光学传感器222和光学传感器223各自为例如距离传感器。作为距离传感器的光学传感器222和光学传感器223各自计测至位于光学传感器222和光学传感器223各自的上侧的物体的距离。然后,控制装置250根据计测出的距离,判断在光学传感器222和光学传感器223各自的上侧是否存在基片。
[0241]
另外,光学传感器222和光学传感器223各自为例如反射型光强度传感器。作为反射型光强度传感器的光学传感器222和光学传感器223各自计测对光学传感器222和光学传感器223各自的上侧照射光,而从位于上侧的物体反射回来的光的强度。然后,控制装置250根据计测出的光的强度,判断在光学传感器222和光学传感器223各自的上侧是否存在基片w。
[0242]
另外,光学传感器222和光学传感器223各自为例如led传感器。
[0243]
对位置偏离的测量方法进行说明。图21至图23是说明由实施方式的第二结构例的输送装置270的末端执行器200进行的基片的位置偏离的测量的图。
[0244]
在载置于基片支承部11的基片w的下侧,沿箭头am,使末端执行器200移动。如图21所示,起初,基片w不位于光学传感器222和光学传感器223各自的上侧。因此,光学传感器222和光学传感器223各自没有检测到基片w。
[0245]
进而,当使末端执行器200沿箭头am移动时,如图22所示,基片w位于光学传感器222和光学传感器223各自的上侧。因此,光学传感器222和光学传感器223各自检测到基片w。
[0246]
进而,当使末端执行器200沿箭头am移动时,如图23所示,基片w不位于光学传感器222和光学传感器223各自的上侧。因此,光学传感器222和光学传感器223各自没有检测到基片w。
[0247]
然后,控制装置250使用光学传感器222和光学传感器223各自检测到的基片w存在的位置的信息,检测基片w相对于末端执行器200的位置偏离。例如,控制装置250求取基片w的中心位置。然后,控制装置250根据该中心位置相对于基准位置的偏离量计算基片w的位置偏离量。
[0248]
控制装置250也可以根据例如光学传感器222和光学传感器223各自检测出的基片w的端点的信息,求取基片w的中心位置。利用各光学传感器222和光学传感器223,求取合计4个光学传感器222和光学传感器223各自检测的基片w的端点。可以根据该4个端点的坐标,例如通过最小二乘法求取基片w的中心坐标,也可以从该4个端点提取3个端点,将通过3个端点的圆的中心坐标作为基片w的中心坐标。此外,关于中心坐标的求取方法,不限于上述而可以采用公知的方法。
[0249]
另外,在上述的说明中,对沿箭头am移动的情况,即,载置(接收)基片w的情况进行了说明,但是在与箭头am反向地移动的情况,即,载置基片w后使末端执行器200待机和避让的情况下也可以计测基片w的位置。
[0250]
另外,光学传感器222和光学传感器223不限于检测基片w的位置,也可以检测设置在等离子体处理装置1(基片处理装置)内的消耗零件,例如,环状组件112的环状部件的位置。此外,光学传感器的数量不限于2个,例如,可以具有2个以上。即,光学传感器也可以设置在至少2处以上。
[0251]
[作用和效果]
[0252]
利用实施方式的第二结构例的末端执行器200,除了实施方式的第一结构例的末端执行器100的效果之外,能够在将输送对象物载置在基片支承部11等的设置上后,检测输送对象物的位置。
[0253]
(实施方式的第三结构例)
[0254]
下面,对实施方式的第三结构例的输送装置370的末端执行器300进行说明。图24是实施方式的第三结构例的输送装置370的末端执行器300的仰视图。末端执行器300在实施方式的第一结构例的输送装置170的末端执行器100的基础上具有静电电容传感器331、静电电容传感器332和静电电容传感器333。末端执行器300的俯视图与图17同样故而省略。
[0255]
输送装置370包括末端执行器300、机械臂160和控制装置350。
[0256]
末端执行器300在载置面的相反侧的底面300s1具有静电电容传感器331、静电电容传感器332和静电电容传感器333。即,末端执行器300在下侧具有静电电容传感器331、静电电容传感器332和静电电容传感器333。
[0257]
静电电容传感器331、静电电容传感器332和静电电容传感器333各自具有俯视时呈大致圆形形状的电极。静电电容传感器331、静电电容传感器332和静电电容传感器333分别测量各自的电极与位于底面300s1的下侧的基片w之间的静电电容。静电电容传感器331、静电电容传感器332和静电电容传感器333分别测量俯视时各自的电极与基片w的俯视时的重叠。
[0258]
静电电容传感器331设置在基部101的x轴方向的中心。静电电容传感器331设置在与静电电容传感器121对应的位置。静电电容传感器332设置在前端部102的y轴方向的+y侧的前端。静电电容传感器332设置在与静电电容传感器122对应的位置。静电电容传感器333设置在前端部103的y轴方向的+y侧的前端。静电电容传感器333设置在与静电电容传感器123对应的位置。
[0259]
静电电容传感器331、静电电容传感器332和静电电容传感器333对基片w检测载置对象例如载置在基片支承部11后的基片w的位置。通过检测载置后的基片w的位置,能够检测在载置基片w后基片w是否载置于正确的位置。例如,当基片w被偏离地载置时,控制装置350再次校正基片w的位置而进行载置。
[0260]
另外,静电电容传感器331、静电电容传感器332和静电电容传感器333不限于检测基片w的位置,也可以检测设置在等离子体处理装置1(基片处理装置)内的消耗零件例如环状组件112的环状部件的位置。
[0261]
另外,静电电容传感器331、静电电容传感器332和静电电容传感器333各自为第二传感器的一个例子。
[0262]
[作用和效果]
[0263]
利用实施方式的第三结构例的末端执行器300,除了实施方式的第一结构例的末端执行器100的效果之外,能够在将输送对象物载置在基片支承部11等的设置上后,检测输送对象物的位置
[0264]
另外,也可以代替静电电容传感器331、静电电容传感器332和静电电容传感器333,而在底面使用实施方式的第二结构例中说明的光学传感器。此外,关于载置面的传感器,不限于静电电容传感器,也可以采用光学传感器。
[0265]
在上述的实施方中,基片与末端执行器的位置关系的计算由控制装置进行,但是基片与末端执行器的位置关系的计算不限于控制装置。例如,控制部cu也可以基于安装于输送装置(输送机器人)的末端执行器所具有的静电电容传感器和光学传感器中的至少任一者的检测结果,计算与输送对象物的相对位置(位置关系)。此外,控制部cu也可以基于计算出的相对位置,决定对于该输送装置(输送机器人)的教示位置。而且,控制部cu也可以将
动作指示输出到输送装置(输送机器人)以将末端执行器配置在所决定的教示位置。此外,将具有控制部cu和输送装置的系统称为输送系统。
[0266]
在上述的实施方中,对利用静电电容传感器和光学传感器作为检测叉形部件与输送对象物的相对位置的传感器的情况进行了说明,但是该传感器的种类并不限定于此。例如,也可以代替静电电容传感器或者光学传感器,而利用磁传感器等非接触式传感器等。此外,也可以与第一实施方式同样,利用摄像机作为传感器。
[0267]
在上述的实施方中,对基片为半导体晶片的情况进行了说明,但本发明并不限定于此。例如,基片也可以是lcd(liquid crystal display:液晶显示器)、fpd(flat panel display:平板显示器)中使用的各种基片、cd基板、印刷基板等。
[0268]
《第三实施方式》
[0269]
[处理系统]
[0270]
参照图1,对实施方式的处理系统的一个例子进行说明。如图1所示,处理系统ps是能够对基片实施等离子体处理等的各种处理的系统。
[0271]
处理系统ps包括真空输送模块tm1、tm2、处理模块pm1~pm12、装载锁定模块ll1、ll2、大气输送模块lm、对准器an、收纳器sr等。
[0272]
真空输送模块tm1、tm2分别具有俯视时呈大致四边形的形状。真空输送模块tm1在相对的2个侧面连接有处理模块pm1~pm6。真空输送模块tm1的其他相对的2个侧面中,在一个侧面连接有装载锁定模块ll1、ll2,在另一个侧面连接有用于与真空输送模块tm2连接的通道(未图示)。真空输送模块tm1的供装载锁定模块ll1、ll2连接的侧面,具有与2个装载锁定模块ll1、ll2相配合的角度。真空输送模块tm2在相对的2个侧面连接有处理模块pm7~pm12。真空输送模块tm2的其他相对的2个侧面中,在一个侧面连接有用于与真空输送模块tm1连接的通道(未图示)。真空输送模块tm1、tm2具有真空气氛的真空室,在内部分别配置有真空输送机器人tr1、tr2。
[0273]
真空输送机器人tr1、tr2构成为可转动、伸缩、升降的。真空输送机器人tr1、tr2基于后述的控制部cu输出的动作指示输送输送对象物。例如,真空输送机器人tr1利用分别配置于机械臂ar11、ar12的前端的末端执行器fk11、fk12保持输送对象物,在装载锁定模块ll1、ll2、处理模块pm1~pm6和通道(未图示)之间输送输送对象物。例如,真空输送机器人tr2利用分别配置于机械臂ar21、ar22的前端的末端执行器fk21、fk22保持输送对象物,在处理模块pm7~pm12和通道(未图示)之间输送输送对象物。此外,末端执行器也称为叉形部件、拾取器。
[0274]
输送对象物包含基片和消耗部件。基片例如为半导体晶片、传感器晶片。消耗部件为可更换地安装于处理模块pm1~pm12内的部件,是由于在处理模块pm1~pm12内进行等离子体处理等的各种处理而消耗的部件。消耗部件例如包含构成后述的环状组件112、喷淋头13的部件。
[0275]
处理模块pm1~pm12具有处理室,具有配置于内部的工作台(载置台)。处理模块pm1~pm12在工作台设置了基片之后,将内部减压而导入处理气体,施加rf电功率而生成等离子体,利用等离子体对基片实施等离子体处理。真空输送模块tm1、tm2和处理模块pm1~pm12由可开闭的闸门(gate valve)g1分隔。
[0276]
装载锁定模块ll1、ll2配置于真空输送模块tm1与大气输送模块lm之间。装载锁定
模块ll1、ll2具有能够将内部切换为真空、大气压的内压可变室。装载锁定模块ll1、ll2具有配置于内部的工作台。装载锁定模块ll1、ll2将基片从大气输送模块lm送入真空输送模块tm1时,将内部维持为大气压而从大气输送模块lm接收基片,将内部减压而向真空输送模块tm1送入基片。装载锁定模块ll1、ll2在将基片从真空输送模块tm1向大气输送模块lm送出时,将内部维持为真空而从真空输送模块tm1接收基片,将内部升压至大气压而向大气输送模块lm送入基片。装载锁定模块ll1、ll2和真空输送模块tm1由可开闭的闸门g2分隔。装载锁定模块ll1、ll2和大气输送模块lm由可开闭的闸门g3分隔。
[0277]
大气输送模块lm与真空输送模块tm1相对地配置。大气输送模块lm例如可以是efem(equipment front end module:设备前端模块)。大气输送模块lm为长方体状,具有ffu(fan filter unit:风机过滤器),是被保持为大气压气氛的大气输送室。在大气输送模块lm的沿长度方向的一个侧面,连接有2个装载锁定模块ll1、ll2。在大气输送模块lm的沿长度方向的另一个侧面,连接有机器人端口lp1~lp4。在机器人端口lp1~lp4,能够载置收纳多个(例如25个)基片的容器c。容器c例如可以是foup(front-opening unified pod:前开式晶片传送盒)。在大气输送模块lm内,配置有输送输送对象物的大气输送机器人tr3。
[0278]
大气输送机器人tr3构成为能够沿大气输送模块lm的长度方向移动,并且构成能够转动、伸缩、升降。大气输送机器人tr3基于后述的控制部cu输出的动作指示来输送输送对象物。例如,大气输送机器人tr3利用配置于机械臂ar31的前端的末端执行器fk31保持输送对象物,在机器人端口lp1~lp4、装载锁定模块ll1、ll2、对准器an和收纳器sr之间输送输送对象物。
[0279]
对准器an连接于大气输送模块lm的沿宽度方向的一个侧面。不过,对准器an也可以与大气输送模块lm的沿长度方向的侧面连接。此外,对准器an也可以设置于大气输送模块lm的内部。对准器an具有支承台、光学传感器(均未图示)等。此处所说的对准器,是指检测输送对象物的位置的装置。
[0280]
支承台是能够以在铅垂方向上延伸的轴线为中心旋转的台,构成为能够在其上支承基片。支承台在驱动装置(未图示)的作用下旋转。驱动装置由后述的控制部cu控制。当在来自驱动装置的动力的作用下而支承台旋转时,设置于该支承台之上的基片也能够旋转。
[0281]
光学传感器在基片旋转的期间,检测基片的边缘。光学传感器根据边缘的检测结果,来检测基片的缺口(或者,其他标记)的角度位置相对于基准角度位置的偏离量、和基片的中心位置相对于基准位置的偏离量。光学传感器将缺口的角度位置的偏离量和基片的中心位置的偏离量输出到后述的控制部cu。控制部cu基于缺口的角度位置的偏离量,计算用于将缺口的角度位置校正为基准角度位置的旋转支承台的旋转量。控制部cu控制驱动装置(未图示),以使旋转支承台以该旋转量旋转。由此,能够将缺口的角度位置校正为基准角度位置。此外,控制部cu基于基片的中心位置的偏离量控制从对准器an接收基片时的大气输送机器人tr3的末端执行器fk31的位置,以使得大气输送机器人tr3的末端执行器fk31上的规定位置与基片的中心位置一致。
[0282]
收纳器sr与大气输送模块lm的沿长度方向的侧面连接。但是,收纳器sr也可以与大气输送模块lm的沿宽度方向的侧面连接。此外,收纳器sr也可以设置于大气输送模块lm的内部。收纳器sr收纳输送对象物。
[0283]
在处理系统ps设置有控制部cu。控制部cu例如可以是计算机。控制部cu具有cpu
(central processing unit:中央处理器)、ram(random access memory:随机存取存储器)、rom(read only memory:只读存储器)、辅助存储装置等。cpu基于保存在rom或者辅助存储装置中的程序进行动作,控制处理系统ps的各部。例如,控制部cu将动作指示输出到真空输送机器人tr1、tr2、大气输送机器人tr3等。动作指示包含输送输送对象物的末端执行器fk11、fk12、fk21、fk22、fk31与输送对象物的输送部位的位置对准的指示。
[0284]
[等离子体处理系统]
[0285]
参照图2,对能够作为处理模块pm1~pm12中所得任一者而采用的等离子体处理系统的一个例子进行说明。
[0286]
在一实施方式中,等离子体处理系统包含等离子体处理装置1和等离子体处理控制部2。等离子体处理装置1包含等离子体处理腔室10、基片支承部11和等离子体生成部12。等离子体处理腔室10具有等离子体处理空间。此外,等离子体处理腔室10具有:用于将至少一个处理气体供给到等离子体处理空间的至少一个气体供给口;和用于从等离子体处理空间排出气体的至少一个气体排出口。气体供给口与后述的气体供给部20连接,气体排出口与后述的排气系统40连接。基片支承部11配置在等离子体处理空间内,具有用于支承基片的基片支承面。
[0287]
等离子体生成部12构成为能够从被供给到等离子体处理空间内的至少一个处理气体生成等离子体。在等离子体处理空间中形成的等离子体可以为电容耦合等离子体(ccp:capacitively coupled plasma)、电感耦合等离子体(icp:inductively coupled plasma)、ecr等离子体(electron-cyclotron-resonance plasma:电子回旋共振等离子体)、螺旋波激发等离子体(hwp:helicon wave plasma)或者表面波等离子体(swp:surface wave plasma)等。此外,也可以使用包含ac(alternating current:交流)等离子体生成部和dc(direct current:直流)等离子体生成部的各种类型的等离子体生成部。在一实施方式中,ac等离子体生成部中使用的ac信号(ac电功率)具有100khz~10ghz的范围内的频率。因此,ac信号包含rf(radio frequency:高频)信号和微波信号。在一实施方式中,rf信号具有200khz~150mhz的范围内的频率。
[0288]
等离子体处理控制部2处理使等离子体处理装置1执行在本发明中说明的各种工序的计算机可执行的命令。等离子体处理控制部2可构成为,能够控制等离子体处理装置1的各要素,以使得执行此处所说明的各种工序。在一实施方式中,也可以为,等离子体处理控制部2的一部分或者全部包含在等离子体处理装置1中。等离子体处理控制部2例如也可以包含计算机2a。计算机2a例如可以包含处理部(cpu:central processing unit,中央处理器)2a1、存储部2a2和通信接口2a3。处理部2a1可构成为,能够基于保存在存储部2a2中的程序来进行各种控制动作。存储部2a2可以包含ram(random access memory:随机存取存储器)、rom(read only memory:只读存储器)、hdd(hard disk drive:硬盘驱动器)、ssd(solid state drive:固态驱动器)或者它们的组合。通信接口2a3可以经由lan(local area network:局域网)等通信线路与等离子体处理装置1之间进行通信。
[0289]
参照图3,以下,说明作为等离子体处理装置1的一个例子的、电容耦合等离子体处理装置的结构例。
[0290]
电容耦合等离子体处理装置1包含等离子体处理腔室10、气体供给部20、电源30和排气系统40。此外,等离子体处理装置1包含基片支承部11和气体导入部。气体导入部构成
为能够将至少一个处理气体导入等离子体处理腔室10内。气体导入部包含喷淋头13。基片支承部11配置在等离子体处理腔室10内。喷淋头13配置在基片支承部11的上方。在一实施方式中,喷淋头13构成等离子体处理腔室10的顶部(ceiling)的至少一部分。等离子体处理腔室10具有由喷淋头13、等离子体处理腔室10的侧壁10a和基片支承部11规定出的等离子体处理空间10s。侧壁10a接地。喷淋头13和基片支承部11与等离子体处理腔室10壳体电绝缘。
[0291]
基片支承部11包含主体部111和环状组件112。主体部111具有用于支承基片(晶片)w的中央区域(基片支承面)111a和用于支承环状组件112的环状区域(环状支承面)111b。主体部111的环状区域111b在俯视时包围主体部111的中央区域111a。基片w配置在主体部111的中央区域111a上,环状组件112以包围主体部111的中央区域111a上的基片w的方式配置在主体部111的环状区域111b上。在一实施方式中,主体部111包含基体和静电吸盘。基体包含导电性部件。基体的导电性部件作为下部电极发挥功能。静电吸盘配置在基体之上。静电吸盘的上表面具有基片支承面111a。环状组件112包含一个或多个环状部件。一个或多个环状部件中的至少一者为边缘环。此外,虽然省略图示,但基片支承部11也可以包含温度调节模块,该温度调节模块构成为能够将静电吸盘、环状组件112和基片中的至少一者调节为目标温度。温度调节模块也可以包含加热器、传热介质、流路或者它们的组合。如卤水、气体这样的传热流体能够在流路中流动。此外,基片支承部11也可以包含传热气体供给部,该传热气体供给部构成为能够对基片w的背面与基片支承面111a之间供给传热气体。
[0292]
喷淋头13构成为能够将来自气体供给部20的至少一个处理气体导入等离子体处理空间10s内。喷淋头13具有至少一个气体供给口13a、至少一个气体扩散室13b和多个气体导入口13c。被供给到气体供给口13a的处理气体,通过气体扩散室13b从多个气体导入口13c被导入等离子体处理空间10s内。此外,喷淋头13包含导电性部件。喷淋头13的导电性部件作为上部电极发挥功能。此外,气体导入部除了喷淋头13之外,还可以包含安装在形成于侧壁10a的一个或多个开口部的一个或多个侧部气体注入部(sgi:side gas injector)。
[0293]
气体供给部20也可以包含至少一个气体源21和至少一个流量控制器22。在一实施方式中,气体供给部20构成为能够将至少一个处理气体从与之分别对应的气体源21经由与之分别对应的流量控制器22供给到喷淋头13。各流量控制器22例如也可以包含质量流量控制器或者压力控制式的流量控制器。而且,气体供给部20也可以包含对至少一个处理气体的流量进行调制或者使其脉冲化的至少一个流量调制器。
[0294]
电源30包含经由至少一个阻抗匹配电路与等离子体处理腔室10耦合的rf电源31。rf电源31构成为能够将如生成源rf信号和偏置rf信号这样的至少一个rf信号(rf电功率)供给到基片支承部11的导电性部件和/或喷淋头13的导电性部件。由此,从被供给到等离子体处理空间10s的至少一个处理气体形成等离子体。因此,rf电源31能够作为等离子体生成部12的至少一部分发挥功能。此外,通过将偏置rf信号供给到基片支承部11的导电性部,能够在基片w产生偏置电位,将所形成的等离子体中的离子成分吸引到基片w。
[0295]
在一实施方式中,rf电源31包含第一rf生成部31a和第二rf生成部31b。第一rf生成部31a经由至少一个阻抗匹配电路与基片支承部11的导电性部件和/或喷淋头13的导电性部件耦合,构成为能够生成等离子体生成用的生成源rf信号(生成源rf电功率)。在一实施方式中,生成源rf信号具有13mhz~150mhz的范围内的频率。在一实施方式中,第一rf生
成部31a也可以构成为能够生成具有不同频率的多个生成源rf信号。所生成的一个或多个生成源rf信号被供给到基片支承部11的导电性部件和/或喷淋头13的导电性部件。第二rf生成部31b经由至少一个阻抗匹配电路与基片支承部11的导电性部件耦合,构成为能够生成偏置rf信号(偏置rf电功率)。在一实施方式中,偏置rf信号具有比生成源rf信号低的频率。在一实施方式中,偏置rf信号具有400khz~13.56mhz的范围内的频率。在一实施方式中,第二rf生成部31b也可以构成为能够生成具有不同频率的多个偏置rf信号。所生成的一个或多个偏置rf信号被供给到基片支承部11的导电性部件。此外,各种实施方式中,也可以将生成源rf信号和偏置rf信号中的至少一者脉冲化。
[0296]
另外,电源30也可以包含与等离子体处理腔室10耦合的dc电源32。dc电源32包含第一dc生成部32a和第二dc生成部32b。在一实施方式中,第一dc生成部32a与基片支承部11的导电性部件连接,构成为能够生成第一dc信号。所生成的第一dc信号被施加到基片支承部11的导电性部件。在一实施方式中,第一dc信号也可以被施加到如静电吸盘内的电极的这样的其他的电极。在一实施方式中,第二dc生成部32b与喷淋头13的导电性部件连接,构成为能够生成第二dc信号。所生成的第二dc信号被施加到喷淋头13的导电性部件。各种实施方式中,也可以将第一和第二dc信号脉冲华。此外,可以除了设置rf电源31之外还设置第一和第二dc生成部32a、32b,也可以代替第二rf生成部31b而设置第一dc生成部32a。
[0297]
排气系统40能够与设置于例如等离子体处理腔室10的底部的气体排出口10e连接。排气系统40也可以包含压力调节阀和真空泵。利用压力调节阀,调整等离子体处理空间10s内的压力。真空泵可以包含涡轮分子泵、干式泵或者它们的组合。
[0298]
《本实施方式的输送机器人470的末端执行器400》
[0299]
对本实施方式的输送机器人470的末端执行器400进行说明。图25是本实施方式的输送机器人470的末端执行器400的俯视图。图26是本实施方式的输送机器人470的末端执行器400的仰视图。
[0300]
另外,在图中,为了方便说明而有时设定了xyz正交坐标系。关于与附图的纸面垂直的坐标轴,在坐标轴的圆圈之中叉号标记表示相对于纸面向里的方向为正,在圆圈之中黑点标记表示相对于纸面的跟前侧为正。但是,该坐标系是为了说明而规定的,并不限定末端执行器等的姿态。
[0301]
另外,在本发明中,只要没有特别说明,就将x轴和y轴作为与末端执行器的载置面平行的方向的轴。y轴为末端执行器的前端部延伸的方向的轴。x轴为与y轴垂直的轴。z轴为与该x轴、y轴垂直的方向的轴。此外,有时将z轴方向称为上下方向。
[0302]
输送机器人470例如表示真空输送机器人tr1、真空输送机器人tr2和大气输送机器人tr3中的至少任一者。输送机器人470基于来自控制部cu的动作指示来输送基片w和设置在等离子体处理装置1(基片处理装置)内的消耗零件。
[0303]
输送机器人470具有末端执行器400、机械臂160和控制装置450。输送机器人470的控制装置450与控制部cu可通信地连接。控制部cu对输送机器人470输出动作指示。输送机器人470基于控制部cu输出的动作指示,利用末端执行器400输送输送对象物。此外,将输送机器人470和控制部cu的组合称为输送系统480。
[0304]
末端执行器400例如表示末端执行器fk11、末端执行器fk12、末端执行器fk21、末端执行器fk22和末端执行器fk31中的至少任一者。机械臂160例如为与末端执行器400对应
的机械臂ar11、机械臂ar12、机械臂ar21、机械臂ar22和机械臂ar31中的任一者。末端执行器400在大气压气氛下和真空气氛下中的至少一者输送输送对象物。
[0305]
控制装置450控制机械臂160。此外,控制装置450与后述的光学传感器422和光学传感器423分别连接。控制装置450基于光学传感器422和光学传感器423各自测量出的结果,测量基片w与末端执行器400的位置关系。然后,控制装置450将测量出的基片w与末端执行器400的位置关系发送到控制部cu。此外,控制部cu也可以基于光学传感器422和光学传感器423各自测量出的结果,测量基片w与末端执行器400的位置关系。
[0306]
末端执行器400载置基片和要设置在等离子体处理装置1的消耗零件。少设置在等离子体处理装置1的消耗零件例如为环状组件112的环状部件。
[0307]
末端执行器400具有俯视时呈大致u字的形状。末端执行器400具有相对于通过x轴方向上的中心在y轴方向上延伸中心轴ax在俯视时对称的形状。
[0308]
末端执行器400具有基部101、前端部102和前端部103。前端部102和前端部103各自从基部101在+y轴方向上延伸地设置。前端部102和前端部103各自为在x轴方向上短、在y轴方向上长的俯视时呈大致长方形的形状。前端部102与前端部103在+x轴方向上隔开间隔地设置。末端执行器400例如由陶瓷形成。
[0309]
末端执行器400具有载置基片和消耗零件中的任一者的载置面100s1。末端执行器400在载置面100s1具有光学传感器422、光学传感器423和保护基片w不与载置面100s1接触的多个衬垫140。光学传感器422设置在前端部102的y轴方向的+y侧的前端。光学传感器423设置在前端部103的y轴方向的+y侧的前端。
[0310]
另外,末端执行器400在载置面100s1的相反侧的底面100s2,具有光学传感器522和光学传感器523。光学传感器522和光学传感器523分别设置在光学传感器422和光学传感器423的背侧。
[0311]
光学传感器422和光学传感器423各自以光学的方式检测在光学传感器422和光学传感器423各自的上侧是否存在基片w。光学传感器422和光学传感器423各自与控制装置450连接。
[0312]
光学传感器522和光学传感器523各自以光学的方式检测在光学传感器522和光学传感器523的各自下侧是否存在基片w。此外,光学传感器522和光学传感器523各自检测处于光学传感器522和光学传感器523的各自的下侧的、例如基片载置面或者环状组件的环状部件等。光学传感器522和光学传感器523各自通过检测处于光学传感器522和光学传感器523的各自的下侧的、例如基片载置面或者环状组件的环状部件等,来检测基片或者环状部件的载置部位的状态。光学传感器522和光学传感器523各自与控制装置450。
[0313]
例如,光学传感器422、光学传感器423、光学传感器522和光学传感器523各自为图像传感器。作为图像传感器的光学传感器422和光学传感器423各自拍摄光学传感器422和光学传感器423各自的上侧。此外,作为图像传感器的光学传感器522和光学传感器523各自拍摄光学传感器522和光学传感器523的各自的下侧。
[0314]
于是,控制装置450根据拍摄到的图像,判断在光学传感器422和光学传感器423各自的上侧是否存在基片。此外,控制装置450根据拍摄到图像,判断在光学传感器522和光学传感器523的各自的下侧是否存在基片。而且,控制装置450判断处于光学传感器522和光学传感器523的各自的下侧的、例如基片载置面或者环状组件的环状部件等的状态(位置等)。
[0315]
另外,光学传感器422、光学传感器423、光学传感器522和光学传感器523各自为例如距离传感器。作为距离传感器的光学传感器422和光学传感器423各自计测至位于光学传感器422和光学传感器423各自的上侧的物体的距离。此外,作为距离传感器的光学传感器522和光学传感器523各自计测至位于光学传感器522和光学传感器523的各自的下侧的物体的距离。
[0316]
于是,控制装置450根据计测出的距离,判断在光学传感器422和光学传感器423各自的上侧是否存在基片。此外,根据计测出的距离,判断在光学传感器522和光学传感器523的各自的下侧是否存在基片。而且,控制装置450判断处于光学传感器522和光学传感器523的各自的下侧的、例如基片载置面或者环状组件的环状部件等的状态(位置等)。
[0317]
另外,光学传感器422、光学传感器423、光学传感器522和光学传感器523各自为例如反射型光强度传感器。作为反射型光强度传感器的光学传感器422和光学传感器423各自计测对光学传感器422和光学传感器423各自的上侧照射光,从位于上侧的物体反射回来的光的强度。此外,作为反射型光强度传感器的光学传感器522和光学传感器523各自计测对光学传感器522和光学传感器523的各自的下侧照射光,从位于下侧的物体反射回来的光的强度。
[0318]
而且,控制装置450根据计测出的光的强度,判断在光学传感器422和光学传感器423各自的上侧是否存在基片。此外,控制装置450根据计测出的光的强度,判断在光学传感器522和光学传感器523的各自的下侧是否存在基片。而且,控制装置450判断处于光学传感器522和光学传感器523的各自的下侧的、例如基片载置面或者环状组件的环状部件等的状态(位置等)。
[0319]
另外,光学传感器422、光学传感器423、光学传感器522和光学传感器523各自为例如led传感器。
[0320]
对位置偏离的测量方法进行说明。图27至图29是说明由本实施方式的输送机器人470的末端执行器400进行的基片的位置偏离的测量的图。此处,对载置于基片支承部11的基片w的位置偏离的测量进行说明。例如,对于装载锁定模块中的基片w的测量能够同样地进行测量。基片w位于末端执行器400的上侧。此外,对于末端执行器400的下侧的测量能够同样地进行测量。
[0321]
在载置于基片支承部11的基片w的下侧,沿箭头am,使末端执行器400移动。如图27所示,最初,基片w不位于光学传感器422和光学传感器423各自的上侧。因此,光学传感器422和光学传感器423各自没有检测到基片w。
[0322]
进而,当使末端执行器400沿箭头am移动时,如图28所示,基片w位于光学传感器422和光学传感器423各自的上侧。因此,光学传感器422和光学传感器423各自检测到基片w。
[0323]
进而,当使末端执行器400沿箭头am移动时,如图29所示,基片w不位于光学传感器422和光学传感器423各自的上侧。因此,光学传感器422和光学传感器423各自没有检测到基片w。
[0324]
然后,控制装置450使用光学传感器422和光学传感器423各自检测到的基片w存在的位置的信息,检测基片w相对于末端执行器400的位置偏离。例如,控制装置450求取基片w的中心位置。然后,控制装置450根据该中心位置相对于基准位置的偏离量计算基片w的位
置偏离量。此外,也可以代替控制装置450,而是控制部cu计算基片w的位置偏离量。
[0325]
控制装置450也可以根据例如光学传感器422和光学传感器423各自检测到的基片w的端点的信息,求取基片w的中心位置。利用各光学传感器422和光学传感器423,求取合计4个基片w的端点。可以根据该4个端点的坐标,例如通过最小二乘法求取基片w的中心坐标,也可以从该4个端点提取3个端点,将通过3个端点的圆的中心坐标作为基片w的中心坐标。此外,关于中心坐标的求取方法,不限于上述而可以采用公知的方法。
[0326]
另外,在上述的说明中,对沿箭头am移动的情况,即,载置(接收)基片w的情况进行了说明,但是在与箭头am反向地移动的情况,即,载置基片w后使末端执行器400待机和避让的情况下也可以计测基片w的位置。
[0327]
另外,光学传感器522和光学传感器523不限于检测基片w的位置,也可以检测设置在等离子体处理装置1(基片处理装置)内的消耗零件,例如环状组件112的环状部件的位置。环状组件112的环状部件(边缘环)的内径与基片w的外径大致相等,因此能够与基片w的位置偏离量的计算同样地计算环状部件的位置偏离量。此外,光学传感器的数量不限于2个,例如也可以具有2个以上。即,光学传感器也可以设置在至少2处以上。
[0328]
《本实施方式的输送系统480的处理》
[0329]
对本实施方式的输送系统480的处理进行说明。图30至图32是说明本实施方式的输送系统480的处理的流程图。图33是说明本实施方式的输送系统480的处理的图。此外,在图33中,将输送机器人470的末端执行器400表示为末端执行器fk。
[0330]
此处,对图30所示的将基片w从装载锁定模块llm送出,而后送入处理模块pm的输送方法进行说明。
[0331]
[将基片w从装载锁定模块llm送出的工序]
[0332]
首先,将基片w从装载锁定模块llm送出(步骤s100)。关于步骤s100的将基片w从装载锁定模块llm送出的工序(步骤s100)的详情,使用图31进行说明。
[0333]
如图33的a所示,当从装载锁定模块llm输出基片w时,基片w成为由销pin从装载锁定模块llm上举到上侧的状态。然后,控制部cu测量基片w的位置。具体而言,一边使末端执行器fk沿箭头a1的方向移动,一边输送机器人470的控制装置450测量基片w的位置(步骤s110)。此外,为了测量基片w的位置,使用关于图33的a的箭头s1的方向在载置面100s1侧的光学传感器422和光学传感器423进行测量。
[0334]
步骤s110的测量如图33的b所示,末端执行器fk移动至基片w的插入侧的相反侧。然后,输送机器人470的控制装置450将测量基片w的位置得到的结果发送到控制部cu。
[0335]
控制部cu计算基片w的位置与所希望的位置的偏离量(步骤s115)。控制部cu判断计算出的偏离量是否为第一阈值以上(步骤s120)。当计算出的偏离量为第一阈值以上时(步骤s120的是(yes)),控制部cu判断计算出的偏离量是否为比第一阈值大的第二阈值以上(步骤s130)。
[0336]
当计算出的偏离量为第二阈值以上时(步骤s130的是),控制部cu认为发生了难以修复的故障而执行紧急停止处理(步骤s140)。控制部cu例如产生警告而使系统,作为紧急停止处理。
[0337]
另一方面,当在步骤s130中偏离量小于第二阈值时(步骤s130的否(no)),控制部cu判断为能够校正基片w的偏离而进行偏离校正处理(步骤s150)。控制部cu例如对末端执
行器fk的位置进行校正,以对偏离量进行校正。
[0338]
而且,当在步骤s120中偏离量小于第一阈值时(步骤s120的否)和步骤s150的处理结束后,执行基片输送处理(步骤s160)。在步骤s160中,如图33的c所示,在末端执行器fk载置基片w,使载置着基片w的末端执行器fk沿箭头a2的方向移动,送出基片w。
[0339]
[将基片w送入处理模块pm的工序]
[0340]
接着,将基片w送入处理模块pm(步骤s200)。对步骤s200的将基片w送入处理模块pm的工序(步骤s200)的详情,使用图32进行说明。
[0341]
如图33的d所示,当对处理模块送入基片w时,使末端执行器fk沿箭头a3的方向移动。然后,基片w成为由销pin从处理模块pm上举到上侧的状态。
[0342]
然后,一边使末端执行器fk沿箭头a4的方向移动,一边输送机器人470的控制装置450测量基片w和载置基片w的载置部位的位置(步骤s210)。此外,为了测量基片w和载置基片w的载置部位的位置,使用关于图33的e的箭头s1的方向在载置面100s1侧的光学传感器422和光学传感器423进行测量。此外,使用关于图33的e的箭头s2的方向在底面100s2侧的光学传感器522和光学传感器523进行测量。
[0343]
载置基片w的载置部位的位置的测量,可以计测环状组件112的环状部件(边缘环)的端部来测量,也可以计测基片支承面111a或者边缘环状支承面111b来测量。
[0344]
在步骤s210的测量后,输送机器人470的控制装置450将基片w的位置作为测量出的结果发送到控制部cu。
[0345]
控制部cu计算基片w的位置与载置部位的位置的偏离量(步骤s215)。控制部cu判断计算出的偏离量是否为第一阈值以上(步骤s220)。当计算出的偏离量为第一阈值以上时(步骤s220的是),控制部cu判断计算出的偏离量是否为比第一阈值大的第二阈值以上(步骤s230)。
[0346]
当计算出的偏离量为第二阈值以上时(步骤s230的是),控制部cu认为发生了难以修复的故障而执行紧急停止处理(步骤s240)。控制部cu例如产生警告而使系统,作为紧急停止处理。
[0347]
另一方面,当在步骤s230中偏离量小于第二阈值时(步骤s230的否),控制部cu判断为能够校正基片w的偏离而进行偏离校正处理(步骤s250)。控制部cu将基片w再次载置在末端执行器fk,例如对末端执行器fk的位置进行校正,以对偏离量进行校正。然后,再次载置在处理模块pm。接着,返回步骤s210而再次反复进行处理。
[0348]
而且,当在步骤s220中偏离量小于第一阈值时(步骤s220的否),执行基片载置处理(步骤s260)。通过执行步骤s260,如图33的f所示,在处理模块pm载置基片w。
[0349]
另外,在上述的说明中,在步骤s120和步骤s220中,利用相同的第一阈值进行判断,但是也可以在步骤s120和步骤s220中使用不同的阈值。步骤s130和步骤s230的第二阈值也可以相同。
[0350]
[作用和效果]
[0351]
利用本实施方式的输送系统480,能够由输送系统480自行诊断并自行校正基片w的位置偏离。因此,利用输送系统480,能够在输送基片w时提高位置精度。通过在输送基片w时使位置精度提高,使输送精度提高,能够提高输送机器人的性能。此外,通过进行自行校正,能够延长装置运行时间。
[0352]
另外,利用本实施方式的输送系统480,能够实时地对基片w的搭载位置进行校正。因此,能够提高输送机器人的可靠性。
[0353]
另外,利用本实施方式的输送系统480,能够对位置偏离进行校正,因此不需要输送机器人的高精度的示教,能够实现示教的自动化。因此,能够节省人力。此外,缩短调整的时间,能够提高生产性。在进行高精度的示教时,使腔室大气开放而进行调整,但由于不需要输送机器人的高精度的示教,因此能够缩短使腔室大气开放的时间。
[0354]
另外,利用本实施方式的输送系统480,能够对位置偏离进行校正,因此能够应用反复输送性能低的输送机器人。因此,能够降低输送机器人的成本。
[0355]
另外,利用本实施方式的输送系统480,能够对位置偏离进行校正,因此能够跟踪对象的温度变化和由消耗引起的形状的变化。
[0356]
例如,虽然使用传感器晶片等,能够测量环状组件112的环状部件的中心位置,但是当末端执行器和基片w的位置偏离于基准位置时,不能将基片w载置在环状部件的中心位置。利用本实施方式的输送系统480,能够对基片w的位置偏离进行校正,因此能够将基片w载置在环状组件112的环状部件的中心位置。
[0357]
另外,即使使用传感器晶片等,使输送机器人进行示教,由于环境的变化(例如,温度)或者传感器晶片与实际输送的基片w的差异等,在运送基片w时,不限于能够以与进行示教时相同精度来运送基片w。利用本实施方式的输送系统480,能够对基片w的位置偏离进行校正,因此能够以高位置精度输送基片w。
[0358]
另外,在上述的说明中,对使用本实施方式的输送系统480输送基片w的情况进行了说明,但输送对象物不限于基片w。例如,也可以使用本实施方式的输送系统480,在输送环状组件112、构成的喷淋头13的部件时使用输送系统480。
[0359]
在上述的实施方中,对利用光学传感器作为检测叉形部件与输送对象物的相对位置的传感器的情况进行了说明,但该传感器的种类并不限定于此。例如,也可以代替光学传感器,而利用磁传感器等非接触式传感器等。此外,也可以与第一实施方式同样,利用摄像机作为传感器。
[0360]
在上述的实施方中,对基片为半导体晶片的情况进行了说明,但本发明并不限定于此。例如,基片也可以是lcd(liquid crystal display:液晶显示器)、fpd(flat panel display:平板显示器)中使用的各种基片、cd基板、印刷基板等。
[0361]
《第一~第三实施方式的作用和效果》
[0362]
以上说明的第一~第三依照实施方式,还起到以下说明的(1)输送机器人的自发热影响降低的效果和(2)输送路径差异影响降低的效果。
[0363]
(1)一直以来,由于输送机器人的自发热,有时发生一些的控制误差。然而,在第一~第三实施方式中,由于对输送对象物与末端执行器的位置关系逐一进行测量,因此无论是否存在自发热,都能够进行位置校正。此外,由于输送机器人的冷却变得不重要,因此能够降低致冷剂(例如冷却气体)的流量。
[0364]
(2)一直以来,根据输送路径的不同而输送机器人的姿态不同,因此当输送路径不同时有时产生控制误差。然而,在第一~第三实施方式中,由于对输送对象物与末端执行器的位置关系逐一进行测量,因此无论输送路径如何,都能够进行位置校正。
[0365]
应当认为,本次公开的实施方式在所有方面均为例示,而并非限制性的。上述的实
施方式在不脱离所附的权利要求及其主旨的情况下,能够以各种方式省略、替换、改变。
[0366]
对于本发明,参照例示的实施方式进行了说明,但该说明并非用于解释为限定性的含义。例示的实施方式的各种修正和组合、以及本发明的其他实施方式,在参展说明时对于本领域技术人员是显而易见的。例如,图4至图7和图17至图29的实施方式,可以在另外的实施方式中组合。同样,图8至图16的实施方式也可以与图17至图29组合。因此,所附的权利要求的范围包含任意这样的修正或者实施方式。
[0367]
关于以上的实施方式,还公开以下以下的付记。
[0368]
(付记1)
[0369]
一种输送系统,其包括:
[0370]
基于动作指示利用末端执行器输送输送对象物的输送机器人;和
[0371]
将上述动作指示输出到上述输送机器人的控制部,
[0372]
上述末端执行器和上述输送对象物中的至少任一者具有传感器和摄像机中的至少任一者,
[0373]
上述控制部基于上述传感器的检测结果和上述摄像机的撮影结果中的至少任一者,计算上述末端执行器与上述输送对象物的相对位置,
[0374]
上述控制部基于上述相对位置决定上述末端执行器相对于上述输送对象物的教示位置,将上述动作指示输出到上述输送机器人以使得在该教示位置配置该末端执行器。
[0375]
(付记2)
[0376]
如付记1记载的输送系统,其中,
[0377]
上述动作指示包含输送上述输送对象物的末端执行器与上述输送对象物的输送部位的位置对准的指示。
[0378]
(付记3)
[0379]
如付记2记载的输送系统,其中,
[0380]
上述输送部位包含如下装置中的至少一者:
[0381]
机器人端口,其载置收纳上述输送对象物的容器;
[0382]
在大气压气氛下检测上述输送对象物的位置的对准器;
[0383]
在大气压气氛下收纳上述输送对象物的收纳器;
[0384]
装载锁定模块,其收纳上述输送对象物并能够切换为大气压气氛和真空气氛;以及
[0385]
收纳上述输送对象物以进行等离子体处理的处理模块。
[0386]
(付记4)
[0387]
如付记2或者付记3记载的输送系统,其中,
[0388]
上述输送对象物是基片和包围该基片的环状组件中的至少任一者,
[0389]
上述基片和上述环状组件具有检测上述输送部位的位置的位置检测传感器。
[0390]
(付记5)
[0391]
如付记1至付记4中的任一者记载的输送系统,其中,
[0392]
上述输送机器人在大气压气氛下和真空气氛下中的至少任一者输送上述输送对象物。
[0393]
(付记6)
[0394]
一种由输送系统进行的输送方法,其中,
[0395]
上述输送系统包括:
[0396]
基于动作指示利用末端执行器输送输送对象物的输送机器人;和
[0397]
将上述动作指示输出到上述输送机器人的控制部,
[0398]
上述末端执行器和上述输送对象物中的至少任一者具有传感器和摄像机中的至少任一者,
[0399]
上述输送方法包括:
[0400]
上述控制部基于上述传感器的检测结果和上述摄像机的撮影结果中的至少任一者,计算上述末端执行器与上述输送对象物的相对位置的工序;和
[0401]
上述控制部基于上述相对位置决定上述末端执行器相对于上述输送对象物的教示位置,将上述动作指示输出到上述输送机器人以使得在该教示位置配置该末端执行器的工序。
[0402]
(付记7)
[0403]
如付记6记载的输送方法,其中,
[0404]
上述动作指示包含输送上述输送对象物的末端执行器与上述输送对象物的输送部位的位置对准的指示。
[0405]
(付记8)
[0406]
如付记7记载的输送方法,其中,
[0407]
上述输送部位包含如下装置中的至少一者:
[0408]
机器人端口,其载置收纳上述输送对象物的容器;
[0409]
在大气压气氛下检测上述输送对象物的位置的对准器,在大气压气氛下收纳上述输送对象物的收纳器,
[0410]
装载锁定模块,其收纳上述输送对象物并能够切换为大气压气氛和真空气氛,和
[0411]
收纳上述输送对象物以进行等离子体处理的处理模块。
[0412]
(付记9)
[0413]
如付记7或者付记8记载的输送方法,其中,
[0414]
上述输送对象物是基片和包围该基片的环状组件中的至少任一者,
[0415]
上述基片和上述环状组件具有检测上述输送部位的位置的位置检测传感器。
[0416]
(付记10)
[0417]
如付记6至付记9中的任一者记载的输送方法,其中,
[0418]
上述输送机器人在大气压气氛下和真空气氛下中的至少任一者输送上述输送对象物。
[0419]
(付记11)
[0420]
如付记6至付记10中的任一者记载的输送方法,其中,
[0421]
在上述输送系统启动时、上述末端执行器进行更换时和收纳上述输送对象物以进行等离子体处理的处理模块内的零件的更换时中的至少一个时间,实施上述输送方法。
[0422]
(付记12)
[0423]
一种输送输送对象物的输送装置,其包括:
[0424]
载置上述输送对象物的末端执行器;
[0425]
使上述末端执行器移动的机械臂;和
[0426]
控制上述机械臂的控制装置,
[0427]
上述末端执行器在载置上述输送对象物的一侧具有传感器和摄像机中的至少任一者,
[0428]
上述传感器和上述摄像机中的至少任一者测量上述输送对象物与上述末端执行器的位置关系。
[0429]
(付记13)
[0430]
如付记12记载的输送装置,其中,
[0431]
上述输送对象物是基片和包围该基片的环状组件中的至少任一者。
[0432]
(付记14)
[0433]
如付记12或者付记13记载的输送装置,其中,
[0434]
上述传感器和上述摄像机中的至少任一者计测上述输送对象物的中心位置。
[0435]
(付记15)
[0436]
如付记14记载的输送装置,其中,
[0437]
上述传感器和上述摄像机中的至少任一者在输送上述输送对象物的时候,计测上述输送对象物的中心位置。
[0438]
(付记16)
[0439]
如付记15记载的输送装置,其中,
[0440]
上述末端执行器具有上述传感器,
[0441]
上述传感器是设置在上述末端执行器的至少2处以上的静电电容传感器。
[0442]
(付记17)
[0443]
如付记16记载的输送装置,其中,
[0444]
上述静电电容传感器设置在上述末端执行器的同一圆周上的至少3处以上。
[0445]
(付记18)
[0446]
如付记14至付记17中的任一者记载的输送装置,其中,
[0447]
上述传感器和上述摄像机中的至少任一者在接收上述输送对象物时计测上述输送对象物的中心位置。
[0448]
(付记19)
[0449]
如付记14至付记18中的任一者记载的输送装置,其中,
[0450]
上述传感器和上述摄像机中的至少任一者在将上述输送对象物载置在基片处理装置内时,计测上述输送对象物的中心位置。
[0451]
(付记20)
[0452]
如付记18或者付记19记载的输送装置,其中,
[0453]
上述末端执行器具有上述传感器
[0454]
上述传感器是设置在上述末端执行器的至少2处以上的光学传感器。
[0455]
(付记21)
[0456]
如付记20记载的输送装置,其中,
[0457]
上述光学传感器设置在上述末端执行器的前端。
[0458]
(付记22)
[0459]
如付记14至付记19中的任一者记载的输送装置,其中,
[0460]
上述控制装置在上述中心位置偏离于所希望的位置的情况下,对上述输送对象物的位置偏离进行校正。
[0461]
(付记23)
[0462]
如付记12至付记22中的任一者记载的输送装置,其中,
[0463]
在上述末端执行器的下侧还具有第二传感器,
[0464]
上述控制装置测量载置有上述输送对象物的部位的位置偏离并对其进行校正。
[0465]
(付记24)
[0466]
如付记12至付记23中的任一者记载的输送装置,其中,
[0467]
上述输送装置在大气压气氛下和真空气氛下的至少一者下输送上述输送对象物。
[0468]
(付记25)
[0469]
一种输送系统,其包括:
[0470]
基于动作指示利用末端执行器输送输送对象物的输送机器人;和
[0471]
将上述动作指示输出到上述输送机器人的控制部,
[0472]
上述末端执行器具有传感器和摄像机中的至少任一者,
[0473]
上述控制部基于上述传感器的检测结果和上述摄像机中的至少任一者,计算上述末端执行器与上述输送对象物的相对位置,
[0474]
上述控制部基于上述相对位置决定上述末端执行器相对于上述输送对象物的教示位置,将上述动作指示输出到上述输送机器人以使得在该教示位置配置该末端执行器。
[0475]
(付记26)
[0476]
一种由输送系统进行的输送方法,其中,
[0477]
上述输送系统
は
,
[0478]
基于动作指示利用末端执行器输送输送对象物的输送机器人;和
[0479]
将上述动作指示输出到上述输送机器人的控制部,
[0480]
上述末端执行器在载置上述输送对象物的一侧具有传感器和摄像机中的至少任一者,
[0481]
上述输送方法包括:
[0482]
(a)上述控制部基于上述传感器的检测结果和上述摄像机的撮影结果中的至少任一者,测量上述输送对象物的位置的工序;以及
[0483]
(b)上述控制部计算测量出的上述输送对象物的位置与所希望的位置的偏离量的工序。
[0484]
(付记27)
[0485]
如付记26记载的输送方法,其中,
[0486]
还包括(c)上述控制部在上述偏离量为第一阈值以上且小于第二阈值的情况下,对上述偏离量进行校正的工序。
[0487]
(付记28)
[0488]
如付记27记载的输送方法,其中,
[0489]
还包括(d)上述控制部在上述偏离量为上述第二阈值以上的情况下,发出警告并使系统停止的工序。
[0490]
(付记29)
[0491]
如付记26至付记28中的任一者记载的输送方法,其中,
[0492]
上述的(a)的工序在上述末端执行器接收上述输送对象物时进行。
[0493]
(付记30)
[0494]
如付记26至付记28中的任一者记载的输送方法,其中,
[0495]
上述的(a)的工序在上述末端执行器对上述输送对象物进行载置时进行。
[0496]
(付记31)
[0497]
如付记26至付记30中的任一者记载的输送方法,其中,
[0498]
上述末端执行器具有上述传感器,
[0499]
上述传感器为光学传感器。
[0500]
(付记32)
[0501]
一种输送系统,其包括:
[0502]
基于动作指示利用末端执行器输送输送对象物的输送机器人;和
[0503]
将上述动作指示输出到上述输送机器人的控制部,
[0504]
上述末端执行器在载置上述输送对象物的一侧具有传感器和上述摄像机中的至少任一者,
[0505]
上述控制部执行:
[0506]
(a)基于上述传感器的检测结果和上述摄像机的撮影结果中的至少任一者,测量上述输送对象物的位置的工序;以及
[0507]
(b)计算测量出的上述输送对象物的位置与所希望的位置的偏离量的工序。
[0508]
附图标记说明
[0509]
cu
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
控制部
[0510]
cs
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
静电电容传感器
[0511]
tr1
ꢀꢀꢀꢀꢀꢀꢀ
真空输送机器人(真空输送机器)
[0512]
fk11、fk12
ꢀꢀ
叉形部件(叉部)
[0513]
tr2
ꢀꢀꢀꢀꢀꢀꢀ
真空输送机器人
[0514]
fk21、fk22
ꢀꢀ
叉形部件
[0515]
tr3
ꢀꢀꢀꢀꢀꢀꢀ
大气输送机器人(大气输送机器)
[0516]
fk31
ꢀꢀꢀꢀꢀꢀ
叉形部件(叉部)
[0517]wꢀꢀꢀꢀꢀꢀꢀꢀꢀ
基片。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1