开关装置的制作方法
1.本发明涉及开关装置,特别涉及按压式开关装置。
背景技术:
2.作为开关装置,已知一种开关装置,该开关装置设有:被按入部件,其在从外部接受按压时,在规定的移动方向上从基准位置向按入位置侧移动,在从按压中被释放时,从按入位置返回基准位置;多个固定触点部;可动触点部,其对与多个固定触点部间的导通状态进行切换。该开关装置的可动触点部与被按入部件的移动联动,与固定触点部接触/分离(例如专利文献1)。
3.现有技术文献
4.专利文献
5.专利文献1:(日本)实用新案登录第3169859号公报
技术实现要素:
6.发明所要解决的技术问题
7.在上述专利文献1的开关装置中,因为可动触点部附设在被按入部件,所以可动触点部的移动量与被按入部件的移动量必然相同。因此,当试图相对于使开关装置工作的周边配件的位置差异确保鲁棒性,较长地确保被按入部件的行程时,可动触点部的移动量也必然增加。当可动触点部的移动量增加时,可动触点部在固定触点部上滑动的滑动距离增长,所以,存在固定触点部的磨损量增加、进而可动触点部及固定触点部间的接触可靠性降低这样的问题。
8.本发明是为了解决上述现有的问题点而提出的,目的在于提供一种开关装置,能够抑制可动触点部及固定触点部间的接触可靠性降低。
9.用于解决技术问题的技术方案
10.为了实现上述目的,本技术所述的开关装置具有:被按入部件,其在从外部接受按压时,在规定的移动方向上从基准位置向按入位置侧移动,在从按压中被释放时,返回所述基准位置;施力部件,其将所述被按入部件向所述基准位置施力;多个固定触点部;至少一个可动触点部,其在与所述被按入部件的移动方向交叉的方向上可摆动地设置,对与所述多个固定触点部间的导通状态进行切换。该开关装置的特征在于,所述被按入部件具有在与移动方向斜交的方向上形成、且在所述可动触点部可滑动的滑动部,在所述被按入部件从所述基准位置向所述按入位置侧移动时,通过所述被按入部件的所述滑动部的滑动,所述可动触点部被所述滑动部进行按压,由此,所述可动触点部摆动,与所述多个固定触点部之中的至少一个接触/分离。
11.另外,基于所述开关装置,所述滑动部也可以包括在与所述被按入部件的移动方向斜交的方向上阶梯性地形成的多个倾斜面。
12.另外,基于所述开关装置,所述可动触点部与所述多个固定触点部之中的一个接
触时所述倾斜面的形成方向和所述可动触点部与所述多个固定触点部之中的任意一个都不接触时所述倾斜面的形成方向相比较,也可以相对于所述被按入部件的移动方向形成较小的角度。
13.另外,基于所述开关装置,所述可动触点部也可以具有与所述多个固定触点部之中的一个电连接的臂部,通过所述被按入部件的所述滑动部的滑动,所述臂部被所述滑动部按压,由此,所述可动触点部摆动,与所述多个固定触点部之中其它的固定触点部接触/分离。
14.另外,基于所述开关装置,所述可动触点部也可以具有与所述多个固定触点部之中的至少一个接触/分离的多个接触部。
15.另外,基于所述开关装置,也可以具有多个所述可动触点部。
16.另外,基于所述开关装置,所述被按入部件也可以相对于多个所述可动触点部的每一个具有所述滑动部。
17.另外,基于所述开关装置,也可以具有一对可动触点部,所述被按入部件相对于所述一对可动触点部具有一对所述滑动部。
18.另外,基于所述开关装置,多个固定触点部也可以具有第一固定触点部及第二固定触点部,所述可动触点部与所述第一固定触点部电连接,在所述被按入部件向所述按入位置侧移动时,与所述第二固定触点部接触,在所述被按入部件向所述基准位置侧移动时,与第二固定触点部分离。
19.另外,基于所述开关装置,多个固定触点部也可以具有第一固定触点部及第二固定触点部,所述可动触点部与所述第一固定触点部电连接,在所述被按入部件向所述按入位置侧移动时,与所述第二固定触点部分离,在所述被按入部件向所述基准位置侧移动时,与所述第二固定触点部接触。
20.另外,基于所述开关装置,多个固定触点部也可以具有第一固定触点部、第二固定触点部及第三固定触点部,所述可动触点部与所述第一固定触点部电连接,在所述被按入部件向所述按入位置侧移动时,与所述第二固定触点部分离并且与所述第三固定触点部接触,在所述被按入部件向所述基准位置侧移动时,与所述第三固定触点部分离并且与所述第二固定触点部接触。
21.发明的效果
22.根据本发明,能够抑制可动触点部及固定触点部间的接触可靠性降低。
附图说明
23.图1是表示第一实施方式的开关装置的一个例子的立体图。
24.图2是表示图1的开关装置的内部结构的一个例子的立体透视图。
25.图3是从左方向观察图2的开关装置的内部结构的侧视图。
26.图4是从上方观察图2的开关装置的内部结构的俯视图。
27.图5是表示第一实施方式的滑动部的一个例子的示意图。
28.图6是示意性地表示第一实施方式的第一固定触点部及第二固定触点部绝缘的状态的侧视图及俯视图。
29.图7是示意性地表示第一实施方式的第一固定触点部及第二固定触点部导通的状
态的侧视图及俯视图。
30.图8是表示第二实施方式的开关装置的内部结构的一个例子的立体透视图。
31.图9是从上方观察图8的开关装置的内部结构的俯视图。
32.图10是示意性地表示第二实施方式的第一固定触点部及第二固定触点部导通的状态的侧视图及俯视图。
33.图11是示意性地表示第二实施方式的第一固定触点部及第二固定触点部绝缘的状态的侧视图及俯视图。
34.图12是表示第三实施方式的开关装置的内部结构的一个例子的立体透视图。
35.图13是从左方向观察图12的开关装置的内部结构的侧视图。
36.图14是从上方观察图12的开关装置的内部结构的俯视图。
37.图15是示意性地表示第三实施方式的第一固定触点部及第二固定触点部绝缘的状态的侧视图及俯视图。
38.图16是示意性地表示第三实施方式的第一固定触点部及第二固定触点部导通的状态的侧视图及俯视图。
39.图17是示意性地表示第四实施方式的第一固定触点部及第二固定触点部导通的状态的俯视图。
40.图18是示意性地表示第四实施方式的第一固定触点部及第三固定触点部导通的状态的俯视图。
具体实施方式
41.下面,参照附图,针对本发明的实施方式进行说明。需要说明的是,对于在如下说明的各实施方式之间相同的结构主要部件,使用相同的标记,因为上述结构主要部件的说明重复,因而省略。
42.<应用例>
43.本技术所述的开关例如是将座椅位置检测、天窗开闭检测、车门开闭检测等作为用途而使用的车载微动开关。
44.(第一实施方式)
45.—开关装置—
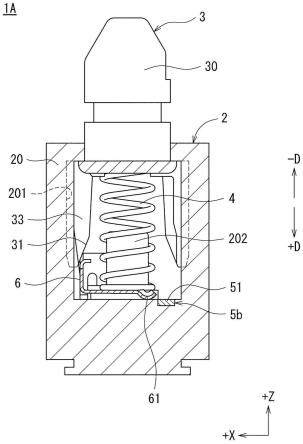
46.图1是表示第一实施方式的开关装置1a的一个例子的立体图。图2是表示图1的开关装置1a的内部结构的一个例子的立体透视图。图3是从左方向观察图2的开关装置1a的内部结构的侧视图。图4是从上方观察图2的开关装置1a的内部结构的俯视图。
47.在附图中,标记x表示开关装置1(a、b、c、d)的前后方向(进深方向),-x方向(负x方向)为前方,+x方向(正x方向)为后方。标记y表示开关装置1(a、b、c、d)的左右方向y,-y方向(负y方向)为左方向,+y方向(正y方向)为右方向。标记z表示开关装置1(a、b、c、d)的上下方向,-z方向(负z方向)为下方,+z方向(正z方向)为上方。上述说明在以后的实施方式中是相同的。需要说明的是,本技术实施方式中使用的上述方向的说明是为了便于说明的方向,并非用于限定本技术所述的开关装置1的配置方向。
48.第一实施方式的开关装置1a具有:壳体2、被按入部件3、施力部件4、固定触点部5(5a、5b)、以及可动触点部6(参照图1~图4)。第一实施方式的开关装置1a形成为通过被按
入部件3在沿着上下方向(z方向)的移动方向d(+d/-d)往复移动,可动触点部6对与固定触点部5(5a、5b)间的导通状态进行切换的结构。
49.<壳体>
50.壳体2具有:壳体主体20、盖部21、以及盖固定部22(参照图1)。壳体2中收纳有被按入部件3、施力部件4、多个固定触点部5(5a、5b)、以及可动触点部6。第一实施方式的壳体2形成为在壳体主体20的上部安装盖部21,从盖部21之上覆盖盖固定部22的结构。
51.壳体主体20形成为大致长方体状(参照图1)。壳体主体20例如通过使用了合成树脂材料的注塑成型等形成。
52.在第一实施方式的壳体主体20的两侧面的外表面上部设有将盖固定部22卡止的被卡止部200。在第一实施方式的壳体主体20的正面的内表面,沿上下方向(z方向)设有用于在移动方向d上引导被按入部件3的引导槽201(参照图3、图4)。在壳体主体20的内部设有用于对施力部件4进行定位的施力部件定位凸台202(参照图3、图4)。
53.在壳体主体20的外表面设有可在开关装置1a的周边部件嵌合的销203、204(参照图1)。
54.盖部21防止水、尘埃等异物侵入壳体主体20内,由防水性、防尘性、挠性等的特性良好的橡胶等弹性体形成。盖部21随着被按入部件3的移动而发生弹性变形。
55.盖固定部22形成为向下方(-z方向)开口的
コ
状(大致u字状)(参照图1)。在盖固定部22的中央部设有用于使被按入部件3向壳体2的外部突出的通孔220。在第一实施方式的盖固定部22的两端部设有被壳体主体20的被卡止部200卡止的卡止部221。
56.<被按入部件>
57.图5是表示第一实施方式的滑动部31的一个例子的示意图。
58.被按入部件3在从外部接受按压时,在移动方向d上从基准位置向按入位置侧移动,在从按压中被释放时,返回基准位置。“来自外部的按压”,例如包括由于开关装置1a的周边部件的工作而接受的按压。“基准位置”是指被按入部件3未从外部接受按压的状态下的被按入部件3的位置“。按入位置”是指在被按入部件3从外部接受按压时、在可移动的范围内与基准位置距离最远的被按入部件3的位置。第一实施方式的“基准位置”位于比“按入位置”更靠近上方(+z方向侧方)。第一实施方式的“按入位置”是指与壳体主体20的底面抵接、限制向下方向(-z方向)进一步移动的状态下的被按入部件3的位置。
59.被按入部件3具有按键部30、以及滑动部31(参照图2,图3)。
60.按键部30是从外部接受按压的部分。第一实施方式的按键部30的上端形成为大致四棱锥台状(参照图1~图3)。
61.滑动部31是在与移动方向d斜交的-x方向/+z方向上形成、可在可动触点部6滑动的部分。在第一实施方式中,通过相对于可动触点部6使滑动部31滑行、移动,滑动部31可在可动触点部6上滑动。
62.第一实施方式的滑动部31在沿着壳体2的正面的内表面从按键部30向下方延设的脚部33的内侧包括在与被按入部件3的移动方向d斜交的方向上阶梯性地形成的第一倾斜面310及第二倾斜面311(参照图3、图5)。第一倾斜面310从左右方向(y方向)观察,形成在与被按入部件3的移动方向d以角度θ斜交的方向上,第二倾斜面311在第一倾斜面的上方(+z方向侧方)上,从左右方向(y方向)观察,形成在与被按入部件3的移动方向d以比角度θ小的
角度φ斜交的方向上。
63.下面,参照图3,对第一实施方式的被按入部件3以滑动部31在可动触点部6滑动的具体例进行说明。随着被按入部件3在+d方向上从基准位置向按入位置侧移动,被按入部件3的滑动部31在+d方向上与可动触点部6接触,在可动触点部6上滑动。如上所述,因为第一实施方式的滑动部31形成在-x方向/+z方向上,所以,通过与滑动部31在+d方向上接触,可动触点部6在滑动部31上相对于被按入部件3相对地在-x方向/+z方向上滑行。这样,被按入部件3以滑动部31在可动触点部6上滑动。
64.<施力部件>
65.施力部件4将被按入部件3向基准位置施力,例如由螺旋弹簧等形成。施力部件4在壳体主体20的施力部件定位凸台202中插通(参照图3、图4)。通过设有施力部件4,在被按入部件3从来自外部的按压中被释放时,使被按入部件3返回基准位置。
66.<固定触点部>
67.第一实施方式的多个固定触点部5包括第一固定触点部5a及第二固定触点部5b(参照图2、图4)。第一实施方式的第一固定触点部5a及第二固定触点部5b都从壳体主体20的下部突出,能够与开关装置的周边部件电连接。
68.第一固定触点部5a配置在壳体主体20内的右侧(+y方向侧)(参照图2、图4)。第二固定触点部5b配置在壳体主体20内的左侧(-y方向侧)(参照图2、图4)。在第二固定触点部5b的上端部设有用于接触可动触点部6的被接触部51。
69.需要说明的是,也可以在第一固定触点部5a及第二固定触点部5b间例如电连接有芯片电阻等电阻。
70.<可动触点部>
71.可动触点部6在与被按入部件3的移动方向d交叉的方向上可摆动地设置,对与第一固定触点部5a及第二固定触点部5b间的导通状态进行切换“。对导通状态进行切换”是指从导通的状态切换为绝缘的状态的动作或其相反的动作。第一实施方式的可动触点部6与第一固定触点部5a电连接,与第二固定触点部5b接触/分离,以对与第一固定触点部5a及与第二固定触点部5b间的导通状态进行切换。
72.第一实施方式的可动触点部6具有臂部60、以及接触部61(参照图2、图4)。
73.第一实施方式的臂部60向壳体主体20的中央部开口,形成为沿着左右方向(y方向)的俯视为
コ
状的形状(大致u字状)(参照图4)。在臂部60的右侧(+y方向侧)的端部电连接有第一固定触点部5a。作为具体例,通过向在臂部60的右侧(+y方向侧)的端部设置的狭缝62插入第一固定触点部5a,臂部60与第一固定触点部5a电连接(参照图2)。
74.可动触点部6在以臂部60的
コ
状的右侧(+y方向侧)角部65为基端、在沿着前后方向(x方向)的摆动方向s(+s/-s)上可摆动地设置(参照图4)。另外,可动触点部6将臂部60用作为板簧,在无负荷状态下返回自然状态。
75.第一实施方式的接触部61(610、611)与第二固定触点部5b接触/分离,通过使臂部60的左侧(-y方向侧)的端部分支为叉子状而形成(参照图4)。接触部61(610、611)在臂部60为无负荷状态时与第二固定触点部5b分离地进行配置(参照图2~图4)。接触部610及接触部611都形成为向上方(+z方向)开口的u字状。接触部611位于接触部610的内侧。与接触部610相比较,与可动触点部6的摆动基端更接近的接触部611的宽度设定得比接触部610的
宽度小(参照图4)。由此,因为能够使接触部610及第二固定触点部5b间的摩擦力与接触部611及第二固定触点部5b间的摩擦力均匀,所以使接触部61(610、611)及第二固定触点部5b间的接触/分离顺畅。
76.下面,参照图4,对第一实施方式的可动触点部6对与第一固定触点部5a及第二固定触点部5b间的导通状态进行切换的具体例进行说明。
77.当上述的第一实施方式的可动触点部6在臂部60沿-x方向接受按压时,以角部65为基端在+s方向上摆动。由于可动触点部6的+s方向的摆动,与第二固定触点部5b分离的可动触点部6的接触部61与第二固定触点部5b的被接触部51接触。由于与第一固定触点部5a电连接的可动触点部6和第二固定触点部5b接触,第一固定触点部5a及第二固定触点部5b间成为导通的状态。另外,当可动触点部6从沿着-x方向的按压中被释放而成为无负荷状态时,试图返回自然状态,在-s方向上摆动。由于可动触点部6的-s方向的摆动,与第二固定触点部5b接触的可动触点部6的接触部61和第二固定触点部5b分离。由于与第一固定触点部5a电连接的可动触点部6和第二固定触点部5b分离,第一固定触点部5a及第二固定触点部5b间成为绝缘的状态。这样,可动触点部6对与第一固定触点部5a及第二固定触点部5b间的导通状态进行切换。
78.如上所述,由于可动触点部6具有多个接触部61(610、611),例如即使在因接触部610的氧化等而出现与第二固定触点部5b的接触问题的情况下,也能够经由接触部611而确保与第一固定触点部5a及第二固定触点部5b间的导通,所以第一固定触点部5a及第二固定触点部5b间的接触可靠性提高。
79.第一实施方式的第一固定触点部5a及第二固定触点部5b都通过嵌件成型,与壳体主体20一体地形成。
80.—开关装置的工作—
81.接着,对第一实施方式的开关装置1a的工作进行说明。
82.图6是示意性地表示第一实施方式的第一固定触点部5a及第二固定触点部5b绝缘的状态的侧视图及俯视图。图7是示意性地表示第一实施方式的第一固定触点部5a及第二固定触点部5b导通的状态的侧视图及俯视图。在附图中,纵向的一点划线表示被按入部件3相对于可动触点部6的滑动位置。在附图中,横向的一点划线概念性地表示被按入部件3的基准位置。另外,在附图中,阴影表示在可动触点部6的接触部61中与第二固定触点部5b接触的部分。上述设定在以后的实施方式中也是相同的。
83.如图6所示,在被按入部件3位于基准位置时,可动触点部6为无负荷状态,可动触点部6的接触部61与第二固定触点部5b分离,第一固定触点部5a及第二固定触点部5b间为绝缘的状态。
84.如图7所示,当被按入部件3从外部接受按压时,被按入部件3被壳体2的引导槽201引导,在+d方向上向按入位置侧移动。被按入部件3随着向按入位置侧移动,以滑动部31向可动触点部6的臂部60的后侧(+x方向侧)滑动。当被按入部件3在可动触点部6的臂部60滑动时,臂部60在滑动部31上相对于被按入部件3相对地在-x方向/+z方向滑行,并且沿-x方向被滑动部31按压。可动触点部6由于该滑动部31沿-x方向的按压,在+s方向、即与被按入部件3的移动方向d交叉的方向上摆动。由于可动触点部6的+s方向的摆动,与第一固定触点部5a电连接的可动触点部6的接触部61和第二固定触点部5b的被接触部51接触,第一固
定触点部5a及第二固定触点部5b间成为导通的状态。
85.如图6所示,当被按入部件3从来自外部的按压中被释放时,被按入部件3由于施力部件4的施力而在-d方向上移动,返回基准位置。被按入部件3相对于可动触点部6的滑动停止,可动触点部6从滑动部31的沿着-x方向的按压中释放,在-s方向上摆动。由于可动触点部6的-s方向的摆动,可动触点部6的接触部61与第二固定触点部5b分离,第一固定触点部5a及第二固定触点部5b间再次成为绝缘的状态。
86.如上所述,在被按入部件3从基准位置向按入位置侧移动时,由于被按入部件3的滑动部31的滑动,可动触点部6被滑动部31按压,由此,可动触点部6摆动,与多个固定触点部5(5a、5b)之中的一个即第二固定触点部5b接触/分离,并且对与第一固定触点部5a及第二固定触点部5b间的导通状态进行切换。
87.在此,在滑动部31与被按入部件3的移动方向d斜交的角度为ω时,被按入部件3的移动方向d的移动量与可动触点部6在滑动部31上的滑行量的比率近似于cos(ω):1。另外,因为滑动部31在+sin(ω)方向/+cos(ω)方向上形成,所以可动触点部6在滑动部31上相对于被按入部件3相对地在+sin(ω)方向/+cos(ω)方向上滑行,被滑动部31沿+sin(ω)方向进行按压而摆动。即,被按入部件3的移动方向d的移动量与可动触点部6的摆动方向s的移动量的比率近似于1:tan(ω)。因此,可动触点部6的摆动方向s的移动量与被按入部件3的移动方向d的移动量相比,必然较小。通过抑制可动触点部6的移动量,在可动触点部6与第二固定触点部5b接触后,在第二固定触点部5b上滑动的滑动距离也被控制,所以,能够抑制第二固定触点部5b的磨损量,进而抑制可动触点部6及第二固定触点部5b间的接触可靠性降低。
88.当然,滑动部31的形状不限于上述说明,例如可以为平面,也可以为曲面,也可以为凹凸面,总之,只要是相对于被按入部件3的移动方向d的移动量能够抑制可动触点部6的摆动方向s的移动量的形状即可。被按入部件3的移动方向d与斜交于移动方向d的滑动部31形成的角度ω不限于上述例子,例如,也可以根据被按入部件3的移动量而变化。另外,滑动部31的形成方向不限于上述说明,例如可以为+x方向/+z方向,也可以为y方向/z方向。
89.另外,在第一实施方式中,如上所述,因为滑动部31包括在与被按入部件3的移动方向d斜交的方向上阶梯性地形成的第一倾斜面310及第二倾斜面311,所以,被按入部件3在从基准位置向按入位置侧移动时,首先,以滑动部31的第一倾斜面310在可动触点部6上滑动,随着该移动,以滑动部31的第二倾斜面311在可动触点部6上滑动。第一倾斜面310及第二倾斜面311与被按入部件3的移动方向d斜交的角度分别为角度θ及角度φ,所以,使可动触点部6的摆动方向s的移动量根据第一倾斜面310及第二倾斜面311而变化。这样,通过使滑动部31包括在与被按入部件3的移动方向d斜交的方向上阶梯性地形成的多个倾斜面(第一倾斜面310及第二倾斜面311),能够以简单的结构,使可动触点部6的摆动方向s的移动量根据被按入部件3的移动量而变化。
90.此外,在第一实施方式中,在可动触点部6与第二固定触点部5b接触时,使被按入部件3以滑动部31的第二倾斜面311在可动触点部6上滑动。如上所述,第一倾斜面310在与被按入部件3的移动方向d以角度θ斜交的方向上形成,第二倾斜面311在与被按入部件3的移动方向d以比角度θ小的角度φ斜交的方向上形成。当应用上述的被按入部件3的移动方向d的移动量与可动触点部6的摆动方向s的移动量的比率时,与第二固定触点部5b接触时
的可动触点部6的摆动方向s的移动量和可动触点部6与固定触点部5之中的任意一个都不接触时的可动触点部6的摆动方向s的移动量的比率近似于tan(φ):tan(θ)。因此,与第二固定触点部5b接触时的可动触点部6的摆动方向s的移动量和可动触点部6与固定触点部5之中的任意一个都不接触时的可动触点部6的摆动方向s的移动量相比较小。由此,在可动触点部6与第二固定触点部5b接触后能够抑制在第二固定触点部5b上滑动的滑动距离,所以能够抑制第二固定触点部5b的磨损量,进而抑制可动触点部6及第二固定触点部5b间的接触可靠性降低。
91.在第一实施方式中,如上所述,通过抑制可动触点部6在第二固定触点部5b上的滑动距离,能够使开关装置1a小型化。
92.此外,在第一实施方式中,如上所述,可动触点部6具有与多个固定触点部5(5a、5b)之中的一个即第一固定触点部5a电连接的臂部60,由于被按入部件3的滑动部31的滑动,臂部60被滑动部31按压,由此,使可动触点部6摆动,与其它的固定触点部即第二固定触点部5b接触/分离。通过可动触点部6具有臂部60,能够以简单的结构,使可动触点部6可摆动地设置。另外,由于被按入部件3的滑动部31在臂部60滑动,能够以利用滑动部31的滑动来使可动触点部6摆动的简单的结构,对与臂部60的第一固定触点部5a及第二固定触点部5b间的导通状态进行切换。
93.另外,从耐腐蚀的角度出发,可动触点部6所接触的第二固定触点部5b的被接触部51希望由镀层等覆膜。在第一实施方式中,如上所述,通过抑制可动触点部6在第二固定触点部5b上的滑动距离,能够减少第二固定触点部5b的镀层面积,所以能够有助于制造成本的降低。
94.如上所述,第一实施方式的开关装置1a可以应用在常开(no)式开关中。
95.(第二实施方式)
96.下面,针对第二实施方式的开关装置1b,只针对与上述第一实施方式的不同之处进行说明。
97.图8是表示第二实施方式的开关装置1b的内部结构的一个例子的立体透视图。图9是从上方观察图8的开关装置1b的内部结构的俯视图。
98.使第二实施方式的接触部61(610、611)都在臂部60为无负荷状态时与第二固定触点部5b的被接触部51接触地进行配置。
99.下面,参照图9,对第二实施方式的可动触点部6对与第一固定触点部5a及第二固定触点部5b间的导通状态进行切换的具体例进行说明。
100.当上述的第二实施方式的可动触点部6在臂部60沿-x方向接受按压时,在+s方向上摆动。由于可动触点部6的+s方向的摆动,与第二固定触点部5b接触的可动触点部6的接触部61和第二固定触点部5b分离。由于与第一固定触点部5a电连接的可动触点部6和第二固定触点部5b分离,第一固定触点部5a及第二固定触点部5b间成为绝缘的状态。另外,当从沿着-x方向的按压中被释放而使可动触点部6为无负荷状态时,试图返回自然状态,在-s方向上摆动。由于可动触点部6的-s方向的摆动,与第二固定触点部5b分离的可动触点部6的接触部61和第二固定触点部5b接触。由于与第一固定触点部5a电连接的可动触点部6和第二固定触点部5b接触,第一固定触点部5a及第二固定触点部5b间为导通的状态。这样,使可动触点部6对与第一固定触点部5a及第二固定触点部5b间的导通状态进行切换。
101.接着,对第二实施方式的开关装置1b的工作进行说明。
102.图10是示意性地表示第二实施方式的第一固定触点部5a及第二固定触点部5b导通的状态的侧视图及俯视图。图11是示意性地表示第二实施方式的第一固定触点部5a及第二固定触点部5b绝缘的状态的侧视图及俯视图。
103.如图10所示,在被按入部件3位于基准位置时,可动触点部6为无负荷状态,可动触点部6的接触部61与第二固定触点部5b的被接触部51接触,第一固定触点部5a及第二固定触点部5b间为导通的状态。
104.如图11所示,当被按入部件3从外部接受按压时,在+d方向上向按入位置侧移动。被按入部件3随着向按入位置侧的移动,以滑动部31在可动触点部6的臂部60上滑动。可动触点部6在从被按入部件3滑动时,被滑动部31沿-x方向进行按压而在+s方向上摆动。由于可动触点部6的+s方向的摆动,与第一固定触点部5a电连接的可动触点部6的接触部61和第二固定触点部5b分离,第一固定触点部5a及第二固定触点部5b间为绝缘的状态。
105.如图10所示,当被按入部件3从来自外部的按压中被释放时,被按入部件3由于施力部件4的施力,在-d方向上移动,返回基准位置。被按入部件3相对于可动触点部6的滑动停止,可动触点部6从滑动部31的沿-x方向的按压中释放,在-s方向上摆动。由于可动触点部6的-s方向的摆动,可动触点部6的接触部61与第二固定触点部5b的被接触部51接触,第一固定触点部5a及第二固定触点部5b间再次为导通的状态。
106.如上所述,第二实施方式的开关装置1b可以应用在常闭(nc)式开关中。
107.(第三实施方式)
108.下面,针对第三实施方式的开关装置1c,只针对与上述第一实施方式的不同之处进行说明。
109.图12是表示第三实施方式的开关装置1c的内部结构的一个例子的立体透视图。图13是从左方向观察图12的开关装置1c的内部结构的侧视图。图14是从上方观察图12的开关装置1c的内部结构的俯视图。
110.第三实施方式的开关装置1c具有:壳体2、被按入部件3、施力部件4、固定触点部5(5a、5b)、以及相对置的一对可动触点部6a及可动触点部6b(参照图12)。
111.第三实施方式的被按入部件3相对于可动触点部6a及可动触点部6b的每一个具有滑动部。具体而言,被按入部件3具有:可在可动触点部6a滑动的滑动部31a、以及可在可动触点部6b滑动的滑动部31b(参照图13)。滑动部31a在沿着壳体2的正面的内表面而从按键部30向下方延设的脚部33a的内侧,形成在-x方向/+z方向上,滑动部31b在沿着壳体2的背面的内表面而从按键部30向下方延设的脚部33b的内侧,形成在+x方向/+z方向上(参照图13)。
112.下面,参照图13,对第三实施方式的被按入部件3以滑动部31a及滑动部31b在可动触点部6a及可动触点部6b滑动的具体例进行说明。当被按入部件3在+d方向上从基准位置向按入位置侧移动时,被按入部件3的滑动部31a在+d方向上与可动触点部6a接触,在可动触点部6a上滑动。此时,可动触点部6a在滑动部31a上相对于被按入部件3相对地在-x方向/+z方向上滑行。同样,滑动部31b在+d方向上与可动触点部6b接触,在可动触点部6b上滑动。此时,可动触点部6b在滑动部31b上相对于被按入部件3相对地在+x方向/+z方向上滑行。
113.在第三实施方式的第一固定触点部5a的上端部设有用于接触可动触点部6b的被接触部51a。在第三实施方式的第二固定触点部5b的上端部设有用于接触可动触点部6a的被接触部51b(参照图12、图14)。
114.第三实施方式的可动触点部6a及可动触点部6b分别与第一固定触点部5a及第二固定触点部5b电连接,相互接触/分离,对与第一固定触点部5a及第二固定触点部5b间的导通状态进行切换。
115.第三实施方式的可动触点部6a具有臂部60a、以及接触部61a,可动触点部6b具有臂部60b、以及接触部61b(参照图12、图14)。在可动触点部6a的臂部60a的右侧(+y方向侧)的端部电连接有第一固定触点部5a。在可动触点部6b的臂部60b的左侧(-y方向侧)的端部电连接有第二固定触点部5b(参照图12、图14)。
116.可动触点部6a以臂部60a的
コ
状的右侧(+y方向侧)角部65a为基端,在沿着前后方向(x方向)的摆动方向s1(+s1/-s1)上可摆动地设置(参照图14)。同样,可动触点部6b以臂部60b的
コ
状的左侧(-y方向侧)角部65b为基端,在沿着前后方向(x方向)的摆动方向s2(+s2/-s2)上可摆动地设置(参照图14)。
117.接触部61a在臂部60a为无负荷状态时与第二固定触点部5b分离地进行配置。同样,接触部61b在臂部60b为无负荷状态时与第一固定触点部5a分离地进行配置。
118.下面,参照图14,对第三实施方式的可动触点部6a及可动触点部6b对与第一固定触点部5a及第二固定触点部5b间的导通状态进行切换的具体例进行说明。
119.当上述的第一实施方式的可动触点部6a以臂部60a沿-x方向接受按压时,以角部65a为基端,在+s1方向上摆动。同样,当可动触点部6b以臂部60b沿+x方向接受按压时,以角部65b为基端,在+s2方向上摆动。由于可动触点部6a的+s1方向的摆动,与第二固定触点部5b分离的可动触点部6a的接触部61a和第二固定触点部5b的被接触部51b接触,并且由于可动触点部6b的+s2方向的摆动,与第一固定触点部5a分离的可动触点部6b的接触部61b和第一固定触点部5a的被接触部51a接触。由于第一固定触点部5a及第二固定触点部5b相互接触,第一固定触点部5a及第二固定触点部5b间为导通的状态。另外,当可动触点部6a从沿着-x方向的按压中被释放而为无负荷状态时,试图返回自然状态,在-s1方向上摆动。同样,当可动触点部6b从沿着+x方向的按压中被释放而为无负荷状态时,试图返回自然状态,在-s2方向上摆动。由于可动触点部6a的-s1方向的摆动,与第二固定触点部5b接触的可动触点部6a的接触部61a和第二固定触点部5b分离,并且由于可动触点部6b的-s2方向的摆动,与第一固定触点部5a接触的可动触点部6b的接触部61b和第一固定触点部5a分离。由于第一固定触点部5a及第二固定触点部5b相互分离,第一固定触点部5a及第二固定触点部5b间为绝缘的状态。这样,使可动触点部6对与第一固定触点部5a及第二固定触点部5b间的导通状态进行切换。
120.如上所述,通过开关装置1c具有多个可动触点部(可动触点部6a及可动触点部6b),例如即使在因可动触点部6a的氧化等而在第一固定触点部5a及第二固定触点部5b间产生接触问题的情况下,也能够经由可动触点部6b确保与第一固定触点部5a及第二固定触点部5b间的导通,所以,第一固定触点部5a及第二固定触点部5b间的接触可靠性提高。
121.接着,对第三实施方式的开关装置1c的工作进行说明。
122.图15是示意性地表示第三实施方式的第一固定触点部5a及第二固定触点部5b绝
缘的状态的侧视图及俯视图。图16是示意性地表示第三实施方式的第一固定触点部5a及第二固定触点部5b导通的状态的侧视图及俯视图。
123.如图15所示,在被按入部件3位于基准位置时,可动触点部6a及可动触点部6b都为无负荷状态,可动触点部6a及可动触点部6b相互分离,第一固定触点部5a及第二固定触点部5b间为绝缘的状态。
124.如图16所示,当被按入部件3从外部接受按压时,被按入部件3被壳体2的引导槽201引导,在+d方向上向按入位置侧移动。被按入部件3随着向按入位置侧的移动,以滑动部31a向可动触点部6a的臂部60a的后侧(+x方向侧)滑动,并且以滑动部31b向可动触点部6b的臂部60b的前侧(-x方向侧)滑动。当被按入部件3在可动触点部6a的臂部60a滑动时,臂部60a在滑动部31a上相对于被按入部件3相对地在-x方向/+z方向上滑行,并且被滑动部31a沿-x方向按压。可动触点部6a由于该滑动部31a沿着-x方向的按压,在+s1方向上摆动。同样,当被按入部件3在可动触点部6b的臂部60b滑动时,臂部60b在滑动部31b上相对于被按入部件3相对地在+x方向/+z方向上滑行,并且被滑动部31b沿+x方向按压。可动触点部6b由于该滑动部31b沿着+x方向的按压,在+s2方向上摆动。
125.由于可动触点部6a的+s1方向的摆动及可动触点部6b的+s2方向的摆动,可动触点部6a的接触部61a与第二固定触点部5b的被接触部51b接触,并且可动触点部6b的接触部61b与第一固定触点部5a的被接触部51a接触。即,第一固定触点部5a及第二固定触点部5b相互接触,第一固定触点部5a及第二固定触点部5b间为导通的状态。
126.如图15所示,当被按入部件3从来自外部的按压中被释放时,被按入部件3由于施力部件4的施力,在-d方向上移动,返回基准位置。被按入部件3相对于可动触点部6的滑动停止,可动触点部6a从滑动部31a的沿着-x方向的按压中释放,在-s1方向上摆动。同样,可动触点部6b从滑动部31b的沿着+x方向的按压中释放,在-s2方向上摆动。由于可动触点部6的-s1方向的摆动及可动触点部6b的-s2方向的摆动,第一固定触点部5a及第二固定触点部5b相互分离,第一固定触点部5a及第二固定触点部5b间再次为绝缘的状态。
127.如上所述,在第三实施方式中,通过被按入部件3相对于多个可动触点部(可动触点部6a及可动触点部6b)的每一个具有滑动部,能够使多个可动触点部(可动触点部6a及可动触点部6b)分别摆动,开关装置1c的设计自由度提高。
128.另外,如上所述,开关装置1c具有一对可动触点部6a及可动触点部6b,被按入部件3相对于一对可动触点部6a及可动触点部6b具有一对滑动部31a及滑动部31b,由此,随着被按入部件3从基准位置向按入位置侧的移动,一对滑动部31a及滑动部31b各自平衡良好地在可动触点部6a及可动触点部6b上滑动,所以,被按入部件3按入时的稳定性提高。
129.如上所述,第三实施方式的开关装置1c可以应用在常开(no)式开关中。
130.(第四实施方式)
131.下面,针对第四实施方式的开关装置,只针对与上述第一实施方式的不同之处进行说明。
132.图17是示意性地表示第四实施方式的第一固定触点部5a及第二固定触点部5b导通的状态的俯视图。图18是示意性地表示第四实施方式的第一固定触点部5a及第三固定触点部5c导通的状态的俯视图。
133.第四实施方式的固定触点部5包括:第一固定触点部5a、第二固定触点部5b、以及
第三固定触点部5c(参照图17、图18)。第二固定触点部5b具有在壳体主体20内的左侧(-y方向侧)配置的被接触部51b,第三固定触点部5c具有在第二固定触点部5b的被接触部51b的前方(-x方向侧方)配置的被接触部51c(参照图17、图18)。
134.第四实施方式的可动触点部6与第一固定触点部5a电连接,与第二固定触点部5b及第三固定触点部5c接触/分离,以对与第二固定触点部5b及第三固定触点部5c间的导通状态进行切换。
135.第四实施方式的接触部61在臂部60为无负荷状态时与第二固定触点部5b接触地进行配置。
136.下面,参照图17及图18,对第四实施方式的可动触点部6对与第二固定触点部5b及第三固定触点部5c间的导通状态进行切换的具体例进行说明。
137.当上述的第四实施方式的可动触点部6以臂部60沿-x方向接受按压时,在+s方向上摆动。由于可动触点部6的+s方向的摆动,与第二固定触点部5b接触的可动触点部6的接触部61和第二固定触点部5b分离,与第三固定触点部5c的被接触部51c接触(参照图18)。由于与第一固定触点部5a电连接的可动触点部6和第二固定触点部5b分离而与第三固定触点部5c接触,第一固定触点部5a及第二固定触点部5b间为绝缘的状态,并且第一固定触点部5a及第三固定触点部5c间为导通的状态。另外,当可动触点部6从沿着-x方向的按压中被释放而为无负荷状态时,试图返回自然状态,在-s方向上摆动。由于可动触点部6的-s方向的摆动,与第三固定触点部5c接触的可动触点部6的接触部61和第三固定触点部5c分离,而和第二固定触点部5b的被接触部51b接触(参照图17)。由于与第一固定触点部5a电连接的可动触点部6和第三固定触点部5b分离,而和第二固定触点部5b接触,第一固定触点部5a及第二固定触点部5b间为导通的状态,并且第一固定触点部5a及第三固定触点部5c间为绝缘的状态。这样,使可动触点部6对与第一固定触点部5a及第二固定触点部5b间的导通状态进行切换。
138.如上所述,第四实施方式的开关装置可以应用在双投式开关中。
139.需要说明的是,在上述第一~第四实施方式中,例示单极式开关并进行了说明,但本技术所述的开关装置也可以应用在多极式开关中。
140.上述实施方式及实施例在所有方面都是例示,并非为限定性说明的依据。因此,本发明的技术范围不是只由上述实施方式及实施例来说明,而是基于技术方案范围的描述来界定。另外,包括与技术方案范围等同的含义及范围内的所有变更。
141.附图标记说明
142.1开关装置;2壳体;3被按入部件;30按键部;31滑动部;4施力部件;5固定触点部;6可动触点部;60臂部;61接触部;d移动方向;s摆动方向。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1