用于连接电导体的接线端子的制作方法
1.本发明涉及一种根据权利要求1前序部分所述的用于连接电导体的接线端子。
背景技术:
2.这种接线端子包括壳体、布置在壳体中的电流杆、布置在壳体中的夹紧弹簧和可移动地支承在壳体中的操纵元件,该夹紧弹簧带有用于在夹紧位置中相对于电流杆夹紧待连接的导体的夹紧腿,借助于操纵元件,夹紧腿可以从夹紧位置转移到打开位置,其中,夹紧腿具有与操纵元件的挤压面共同作用的滑动部。
3.在de 10 2019 106 350 a1中描述了一种这样的接线端子。与已知的接线端子相比,这种接线端子具有改进的操作性。
4.de 10 2019 106 351 a1和de 10 2019 106 353 a1描述了另外的接线端子。
5.一般而言,在用于连接电导体的接线端子中,需要直观且简单的操作,以避免连接失误并实现快速连接。由于这种接线端子通常以接线排的形式构造,其中许多接线排并排安装和连接,所以接线端子的可操作性的改善特别重要。
技术实现要素:
6.本发明的目的是提供一种操作性得到改善的接线端子。
7.该目的通过具有权利要求1的特征的主体来实现。
8.因此规定,挤压面具有第一区段和第二区段,第一区段和第二区段通过连接区段相互连接,连接区段具有比第一区段和第二区段更大的曲率,其中,滑动部设置用于在从夹紧位置转移到打开位置时在第一区段、连接区段和第二区段上滑动。
9.由此实现了在操纵操纵元件时,不必使用沿着操纵路径持续变大的力,而是在操纵路径的开始的子区段之后在触觉上简化进一步的操纵,直至例如到达止挡。由此,对于使用者来说明显更容易识别出,操纵元件何时移动得足够远,或者是否需要进一步的移动来到达打开位置。特别是在用于相对较大的导体横截面的接线端子的变型方案中,这一点特别重要。因此,提供一种接线端子,其能够实现明显改进的可操作性。
10.第一区段尤其通过第一面区段形成,第二区段通过第二面区段形成并且连接区段通过第三面区段形成。那么,第一面区段例如直接邻接于第三面区段;第三面区段例如直接邻接于第二面区段。第三面区段例如位于第一面区段和第二面区段之间。在夹紧腿从夹紧位置转移到打开位置时,滑动部从第一区段开始经由连接区段滑动到第二区段。因此,在夹紧腿从夹紧位置转移到打开位置时,滑动部沿着第一区段、沿着连接区段且沿着第二区段滑动。
11.在夹紧腿的打开位置中,电导体可引入到在夹紧腿和电流杆之间构造的导电连接室中和/或可从其中取出,尤其是无损坏地取出。
12.挤压面的连接区段例如具有一个凸形弯曲部。这实现了从夹紧位置到打开位置的打开运动和到达打开位置中的止挡之间的特别明显的触觉差异。
13.可选地,挤压面的第一区段具有凹形弯曲部。这实现了例如打开运动的平稳的导入。可选地,第一区段的凹形弯曲部(kr
ü
mmung)朝连接区段例如逐步地或连续地缩小。
14.同样可选地,挤压面的第二区段具有平坦的表面。例如,整个第二区段或至少其大部分构造为平坦的。
15.挤压面还可以具有一个(附加的)突起。滑动部可选地在至少一个位置上抵靠在突起上,例如,在夹紧腿的夹紧位置。突起例如由凸形面区段形成。由此可以预先给定操纵元件在夹紧位置中的明确定义的位置,并且在操纵该操纵元件从夹紧位置中出来时能够实现移动运动的轻松的导入。
16.根据可选的实施方式,挤压面的第一区段设置在突起和连接区段之间。因此,在夹紧腿从夹紧位置转移到打开位置时,滑动部从突起开始经由第一区段滑动到连接区段中。
17.例如,挤压面的第一区段、第二区段和连接区段共同形成两级。这允许在打开运动时的两级触感,这实现了打开运动与到达止挡特别明显的区分。
18.可选地,夹紧腿包括第二滑动部,并且操纵元件包括第二挤压面,其中,第二滑动部设置用于在从夹紧位置转移到打开位置中时沿着操纵元件的第二挤压面滑动。这实现了力的均衡分配。例如,第一挤压面和第二挤压面相同地构造,特别是成形。
19.可选地,操纵元件具有两个操纵臂,在操纵臂上分别构造有其中一个挤压面。在此,在操纵臂之间可以构造容纳部。例如,电流杆被引导穿过容纳部,和/或待连接的导体可以被引入到容纳部中。
20.可以规定,操纵元件具有止挡面,该止挡面例如在打开位置贴靠到配对止挡上。例如,止挡面在打开位置中贴靠到电流杆上。止挡面例如构造在这两个操纵臂之间。这能够实现特别牢固的止挡。
附图说明
21.下面借助于在附图中示出的实施例详细阐述本发明的构思。其中:
22.图1a-图1c示出了接线端子的一个视图,其中,接线端子的夹紧弹簧的夹紧腿处于夹紧位置;
23.图2a和图2b示出了根据图1a-图1c的接线端子的视图,其中,夹紧腿处于打开位置;
24.图3示出了根据图1a-图2b的接线端子的壳体的视图;
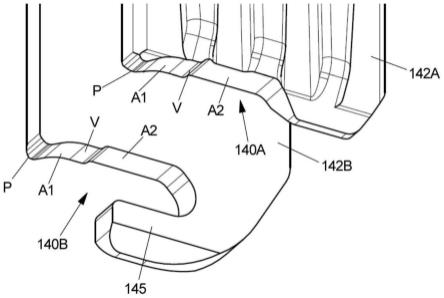
25.图4a和图4b示出了根据图1a-图2b的接线端子的操纵元件的视图;
26.图5示出了根据图1a-图2b的接线端子的电流杆的视图;
27.图6示出了根据图1a-图2b的接线端子的夹紧弹簧的视图;和
28.图7示出了根据图1a-图2b的接线端子的力-位移-曲线图。
具体实施方式
29.图1a-图2b示出了用于连接电导体2的接线端子1,电导体如例如在图2b中所示。
30.接线端子1具有壳体10,它可以构造为绝缘材料壳体。壳体10具有内腔。此外,壳体10具有导体引入口11(例如参见图1b和图2b以及单独示出壳体10的图3),待连接的导体2可通过该导体引入口11引入到壳体10的内腔中。在壳体10中布置有电流杆12,夹紧弹簧13和
用于操纵夹紧弹簧13的操纵元件14。
31.电流杆12例如与外部元件电连接或可连接在其上。图5中单独示出的电流杆12的测试触头121可以通过壳体10中的开口电接触。电流杆12包括两个彼此垂直延伸的子区段。
32.借助于夹紧弹簧13,待连接的电导体2能够被夹紧在壳体10的内部。
33.在电流杆12与夹紧弹簧13之间构造导电连接室15,在导电连接室内进行导体2的电连接并且由此进行夹紧。
34.夹紧弹簧13构造为夹腿弹簧。其具有保持腿134,夹紧腿130和构造在保持腿134与夹紧腿130之间的弯关节135,如尤其在图6中可看出的,在其中单独地示出了夹紧弹簧13。
35.夹紧弹簧13利用保持腿134挂在电流杆12的突出的凸鼻上。弯关节135插在构造于壳体10中的支架101上。夹紧腿130可相对于保持腿134运动、尤其是可摆动。借助于夹紧腿130可以实现待连接的电导体2相对于电流杆12的夹紧。
36.操纵元件14可移动地支承在壳体10中。为此,操纵元件14在壳体的井道100中可移动地引导。夹紧弹簧13的夹紧腿130从例如在图1a-图1c中所示的夹紧位置到如例如在图2a和图2b中所示的打开位置的转移借助于操纵元件14的移动运动进行。在此操纵元件14纯线性地沿着操纵方向b移动。操纵元件14的操纵方向b垂直于电导体2到壳体10中的插入方向e延伸。夹紧弹簧13被预紧在夹紧位置中。
37.操纵元件14(在此在端面上)具有操纵面141,通过所述操纵面操纵元件14例如可以借助工具,如螺丝刀操纵。在此,操纵元件14能够在壳体10中移动。在夹紧位置,操纵元件14设置成,使得操纵面141例如能够与壳体10的外表面齐平地终止。在打开位置,操纵面141布置在壳体10中,尤其是比在夹紧位置更深地布置在壳体10中。
38.操纵元件14还具有至少一个挤压面,在此为两个挤压面140a,140b。在所示的示例中,挤压面140a,140b形成在操纵元件14的与操纵面141相对的端部处。
39.挤压面140a,140b与夹紧弹簧13的夹紧腿130共同作用,以便将力从操纵元件14传递到夹紧弹簧13的夹紧腿130上并且由此将夹紧腿130从夹紧位置转移到打开位置。
40.在夹紧腿130上构造至少一个滑动部,在此构造两个滑动部131a,131b。滑动部131a,131b布置和构造成分别与操纵元件14的挤压面140a,140b中的一个共同作用,使得在操纵操纵元件14时夹紧腿130利用滑动部131a,131b沿着挤压面140a,140b滑动。
41.两个挤压面140a,140b彼此平行地延伸,如在图4a中可见。两个滑动部131a,131b同样彼此平行地延伸,如特别是在图6中所示。
42.如尤其根据图4a和4b可见,挤压面140a,140b分别具有第一区段a1和第二区段a2。第一区段a1分别通过连接区段v与第二区段a2相连。在此规定,连接区段v具有比第一区段a1和/或第二区段a2更大的曲率和/或斜率。在每个挤压面140a,140b中,第一区段a1和第二区段a2相对于彼此分级。相应的第一区段a1形成第一级,相应的第二区段a2形成第二级。在第一级和第二级之间的过渡处的斜率最大。相应的第一区段a1比相应的第二区段a2距离操纵面141更远。挤压面140a,140b的轮廓因此在第一和第二区段a1,a2之间分别具有肩部。
43.第一区段a1具有凹面,连接区段v具有凸面,并且第二区段a2具有平面。第一区段a1,连接区段v和第二区段a2以此顺序布置。连接区段v布置在第一区段a1和第二区段a2之间。在背离相应的连接区段v的端部处,相应的第一区段a1邻接在突起p上。突起p是凸形的。突起p形成操纵元件14的相应的角部。
44.第二区段a2的相应的平面垂直于操纵方向b定向。
45.两个挤压面140a,140b的所述造型产生在图7中以实线示出的力f关于行程x的走向。首先必须使用最小力,以便使操纵元件14克服夹紧弹簧13的力移动。此后,进一步移动所需的力增加,但是随后由于设有两个分级区段a1,a2的挤压面140a,140b而再次减小。然后所需的力才再次增加。
46.也就是说,起初感觉到需要使用相对大的力才能够操纵夹紧弹簧13。在第一和第二级之间的过渡处,用户觉察到阶跃。此后,进一步的操纵感觉更轻松,直到到达止挡。借助于该轮廓,对于使用者来说更容易感觉到何时到达止挡。
47.在从夹紧位置转移到打开位置时,各滑动部131a,131b(从突起p开始)在第一区段a1、连接区段v以及第二区段a2上滑动。
48.图7中的虚线示例性地示出了不具有两个通过更强烈弯曲的连接区段相连的区段的挤压面的相应的走向。可以看到,当力的走向相应地持续上升时,到达止挡明显更艰难。
49.操纵元件14具有两个在此相互平行延伸的操纵臂142a,142b(尤其参见图4a)。在操纵臂142a,142b上分别构造挤压面140a,140b中的一个。两个操纵臂142a,142b彼此间隔开,从而在两个操纵臂142a,142b之间构造容纳部144。
50.电流杆12引导穿过操纵元件14的容纳部144。换言之,操纵元件14利用容纳部144插在电流杆12上。此外,待连接的电导体2能够插入到容纳部144中。容纳部144限定导电连接室15。具体地,导电连接室15在侧面由两个操纵臂142a,142b限定。导电连接室15向上(例如相对于从上向下定向的操纵方向b)由电流杆12限定。导电连接室15向下由夹紧弹簧13的夹紧腿130限定。
51.操纵元件14还包括止挡面143,该止挡面与在此提供配对止挡面的电流杆12一起形成用于操纵元件14相对于壳体10的移动运动的端部止挡。止挡面143形成在两个操纵臂142a,142b之间。
52.夹紧弹簧13的夹紧腿17具有夹紧片132。夹紧片132设置在两个滑动部131a,131b之间。在夹紧片132上形成有夹紧棱边133,待连接的电导体2能够借助夹紧棱边与电流杆12夹紧。在此,电流杆12具有棱边120,当没有电导体2布置在导电连接室15中时,夹紧棱边133在夹紧位置上贴靠在该棱边120上。
53.夹紧片132构造得比两个滑动部131a,131b长,从而夹紧片132伸出超过两个滑动部131a,131b。两个滑动部131a,131b因此从夹紧棱边133朝夹紧弹簧13的弯关节135的方向回缩。夹紧片132基本上直线地构造。两个滑动部131a,131b分别具有弧形形状。这些滑动部131a,131b分别向挤压面140a,140b的方向拱曲地构造。这些滑动部131a,131b相同地构造。
54.如果电导体2插入到接线端子1中并且借助夹紧弹簧13夹紧到电流杆12上,则滑动部131a,131b与相应的突起p接触,也就是说,在此分别以滑动部131a,131b的一个端部接触。
55.操纵元件14包括(可选的)钩145,钩在此构造在操纵元件14的与操纵面141相对置的端部上。钩145围住滑动部131a,131b的其中之一。因此,操纵元件14利用钩145保持在滑动部141b上,并且无法在井道100中移动至当夹紧腿130设置在夹紧位置时操纵元件14所处位置中。因此,通过推入到壳体10中的操纵元件14可轻易地识别出,插入的电导体2是否被正确地夹紧。
56.接线端子1例如是接线排。
57.附图标记说明
58.1 接线端子
59.10 壳体
60.100 井道
61.101 支架
62.11 导体引入口
63.12 电流杆
64.120 棱边
65.121 测试触头
66.13 夹紧弹簧
67.130 夹紧腿
68.131a,131b 滑动部
69.132 夹紧片
70.133 夹紧棱边
71.134 保持腿
72.135 弯关节
73.14 操纵元件
74.140a,140b 挤压面
75.141 操纵面
76.142a,142b 操纵臂
77.143 止挡面
78.144 容纳部
79.145 钩
80.15 导电连接室
81.2 电导体
82.a1,a2 区段
83.b 操纵方向
84.e 插入方向
85.p 突起
86.v 连接区段
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1